If your PID gains are off, you'll either spend forever reaching setpoint or send your system into destructive oscillation. Neither is workable if you care about repeatable, precise motion. This PID Tuning Calculator uses the Ziegler-Nichols Method to give you P, I, and D values based on the ultimate gain (Ku) and ultimate period (Tu) you measure on your actual hardware. This kind of approach pops up everywhere — automation, robotics, actuator control — any place you don't want to spend your life hand-tweaking parameters for acceptable response. You'll find all the standard Ziegler-Nichols equations laid out below, with a working example, some real-world background, and a practical FAQ.
What is PID Tuning with the Ziegler-Nichols Method?
PID tuning is about dialing in P, I, and D so the controller gets where you want it, quickly and without overshooting or oscillating. The Ziegler-Nichols method skips trial-and-error: measure just two numbers on your system — ultimate gain and period — and calculate gains from there. No guesswork needed.
Simple Explanation
A PID controller works a lot like a person steering a car: proportional gain tells you how strongly to react to being off course, integral gain is there to fix persistent drift, and derivative gain keeps you from whipping the wheel back and forth. Ziegler-Nichols' trick is to push your system right to the edge where it starts to oscillate, then use those numbers to set the controller so it's fast without going unstable.
📐 Browse all 1000+ Interactive Calculators
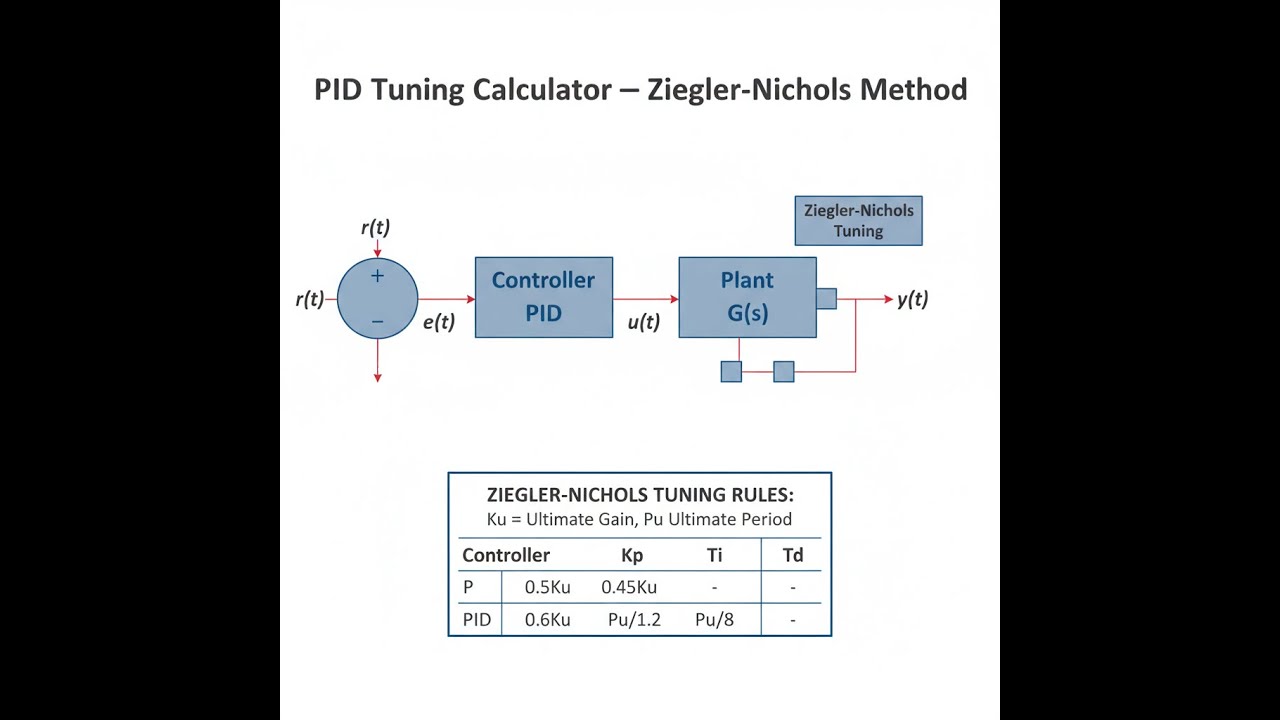
PID Control System Diagram

PID Tuning Calculator — Ziegler-Nichols Method
How to Use This Calculator
This calculator is intended for education, concept evaluation, and preliminary design. Results are based on the equations and assumptions described on this page, but cannot account for every real-world load case, tolerance, material property, environmental condition, installation detail, safety factor, code, or regulatory requirement. Verify all inputs, assumptions, units, and results independently before selecting components or using the result in a real application. Safety-critical, structural, medical, lifting, transportation, or regulated applications must be reviewed by a qualified engineer.
- Enter the Ultimate Gain (Ku) — the proportional gain at which your system just begins to oscillate with constant amplitude.
- Enter the Ultimate Period (Tu) in seconds — the period of those sustained oscillations.
- Select your Controller Type: PID, PI, or P-only.
- Click Calculate to see your result.
PID Tuning Calculator Interactive Visualizer
You can use Ziegler-Nichols to quickly see how the ultimate gain and period numbers change your PID settings. Tweak Ku or Tu and watch how fast you make the system or how much you risk instability. There's no substitute for seeing the system's response change as you adjust these values.
PROPORTIONAL (Kp)
6.0
INTEGRAL (Ki)
3.0
DERIVATIVE (Kd)
3.0
FIRGELLI Automations — Interactive Engineering Calculators
Ziegler-Nichols Tuning Equations
Here’s how to directly compute the PID gains using your measured Ku and Tu values.
PID Controller Equations:
Proportional Gain: Kp = 0.6 × Ku
Integral Gain: Ki = 2Kp / Tu
Derivative Gain: Kd = KpTu / 8
Where:
- Ku = Ultimate gain (critical gain at stability boundary)
- Tu = Ultimate period (oscillation period at critical gain)
- Kp = Proportional gain coefficient
- Ki = Integral gain coefficient
- Kd = Derivative gain coefficient
Simple Example
Given: Ku = 10, Tu = 4 seconds, PID controller.
- Kp = 0.6 × 10 = 6.0
- Ki = 2 × 6.0 ÷ 4 = 3.0
- Kd = 6.0 × 4 ÷ 8 = 3.0
Result: Kp = 6.0, Ki = 3.0, Kd = 3.0.
Understanding PID Tuning with Ziegler-Nichols Method
Ziegler-Nichols is a classic, practical way to find PID controller settings in automation. It’s not a magic bullet, but it will get you close quickly. All you need are two numbers measured off your real system. With just those, you calculate controller settings that get you in the right ballpark.
How the Ziegler-Nichols Method Works
To use Ziegler-Nichols, you push the system until it just begins to oscillate using proportional gain alone (set I and D to zero). The gain where the system starts cycling endlessly is your Ku (ultimate gain). The time it takes for a full oscillation is Tu (ultimate period). With those, you use the Ziegler-Nichols formulas to get P, I, and D gains for your controller.
At Ku and Tu, you’re right at the edge between stability and instability. That information gives you a starting set of PID numbers that match your actual system instead of relying on model guesses.
The Physical Process Behind PID Control
PID controllers apply three control actions: proportional (direct error correction), integral (eliminate steady-state error), and derivative (counteract rapid changes, dampen response). Ziegler-Nichols gives you a formula for each part, based on how your system actually behaves under real conditions. Keep in mind: increasing proportional speeds things up and may overshoot, integral cleans up any steady bias, and derivative slows rapid swings. The formulas work best for systems that are reasonably linear around the operating point.
Practical Applications in Linear Actuator Systems
On position-controlled linear actuators (particularly electric, with some mechanical damping), you’ll see these methods produce practical results fast. If you’re driving an actuator in, say, a robotic pick-and-place system, you usually want the actuator to settle quickly and avoid overshoot. Using Ziegler-Nichols, you can skip weeks of manual tuning and start with values that won’t destabilize the axis. You won’t get perfection on the first try, but you won’t waste time guessing either.
Worked Example: Actuator Position Control
For example, say a linear actuator system starts to oscillate at a gain of Ku=8.5 and a Tu=2.4 seconds. The basic PID outputs are:
- Kp = 0.6 × 8.5 = 5.1
- Ki = 2 × 5.1 ÷ 2.4 = 4.25
- Kd = 5.1 × 2.4 ÷ 8 = 1.53
That set will usually get your actuator responding sensibly right away, and you can work from there if your application needs finer adjustment.
Experimental Procedure for Determining Critical Parameters
To find Ku and Tu:
Step 1: Set your controller to P-only (zero out integral and derivative gains).
Step 2: Use a low P gain to start, then ramp it up slowly. Watch how the actuator or process responds to a step input.
Step 3: Keep increasing P until you see stable, constant-amplitude oscillations with no sign of settling. That’s your ultimate gain (Ku).
Step 4: Measure the time from peak-to-peak for several cycles. That’s your ultimate period (Tu).
Step 5: Plug those numbers into the Ziegler-Nichols equations or calculator for tuning.
Design Considerations and Limitations
Ziegler-Nichols is a solid starting point, but keep a few important things in mind:
System Nonlinearities: Many actuators and machines have dead zones, friction, or backlash that Ziegler-Nichols doesn’t account for. Expect to tweak.
Load Variations: If your loads change significantly, the optimal PID numbers may too. You might need multiple PID settings or adaptive logic to stay sharp across all cases.
Noise Sensitivity: High-frequency noise can get amplified by the derivative part. If you see lots of jitter, reduce or filter derivative action.
Safety Considerations: Driving a system to oscillation risks hardware (especially if it’s heavy, fast, or expensive). Always be ready to kill power and don’t leave the rig unattached or unsupervised during tests.
Advanced Tuning Modifications
Some applications run better with a less aggressive or more aggressive version of Ziegler-Nichols. If you need more stability margin (slower but safer), start with Kp = 0.33Ku and adjust. For tighter tracking where stability is less of a concern, bump Kp and tweak I and D accordingly. For systems where derivative noise is a problem, PI-only control (Kp=0.45Ku, Ki=1.2Kp/Tu) is often used.
Integration with Modern Control Systems
These days, many industrial controllers and PLCs have Ziegler-Nichols-based auto-tuning built in. They apply a step, find Ku and Tu for you, then load up the suggested PID values. Especially with actuators and motion axes, this gives you a consistent starting point and makes documentation easier. If you’re in an environment with lots of axes or duplicated hardware, this systematic approach saves time and gives reliable, comparable tuning.
For cases with non-standard or fast-changing loads, or with large time delays, you may need more advanced strategies. But for typical motion or actuator systems, this is the quickest route to stable, fast response.
Frequently Asked Questions
What is the ultimate gain in Ziegler-Nichols tuning?
How do I safely determine the ultimate gain without damaging my system?
Can Ziegler-Nichols tuning be used for all types of control systems?
Why might the calculated PID parameters need further adjustment?
What are the advantages of using this method over trial-and-error tuning?
How does load variation affect Ziegler-Nichols tuned parameters?
📐 Browse all 1000+ Interactive Calculators →
About the Author
Robbie Dickson
Chief Engineer & Founder, FIRGELLI Automations
Robbie Dickson brings over two decades of engineering expertise to FIRGELLI Automations. With a distinguished career at Rolls-Royce, BMW, and Ford, he has deep expertise in mechanical systems, actuator technology, and precision engineering.
Need to implement these calculations?
Explore the precision-engineered motion control solutions used by top engineers.



