Việc sử dụng phản hồi để đảm bảo chuyển động chính xác là điều quan trọng trong bất kỳ dự án tự động hóa nào từ robot đến thang nâng TV. Việc triển khai phản hồi đúng cách cho phép kiểm soát vòng kín chính xác của bạn thiết bị truyền động tuyến tính; bạn không còn cần phải kiểm tra thủ công xem bộ truyền động tuyến tính của bạn có đi đúng vị trí hay không. Vì bộ truyền động tuyến tính thường được sử dụng để di chuyển một vật thể từ vị trí này sang vị trí khác nên phản hồi quan trọng nhất nhận được từ bộ truyền động của bạn là vị trí của nó. Bộ truyền động tuyến tính có phản hồi vị trí thường sẽ đo vị trí bằng một trong 3 cảm biến khác nhau; chiết áp, cảm biến hiệu ứng Hall và cảm biến quang học.
chiết áp
chiết áp là các điện trở thay đổi mà khi được sử dụng trong bộ truyền động tuyến tính, điện trở của chúng thay đổi dựa trên vị trí của bộ truyền động. Chiết áp sẽ gồm có 3 chân như hình bên dưới, chân 1 là điện áp đầu vào, chân 3 là nối đất và chân 2 là điện trở điều chỉnh. Bạn có thể đọc đầu ra của chiết áp bằng cách đo điện áp giữa chân 2 và mặt đất, điện áp này sẽ thay đổi khi bộ truyền động di chuyển. Để có hiệu quả thực hiện phản hồi này, bạn sẽ cần sử dụng một số loại bộ điều khiển, chẳng hạn như Arduino, để đọc giá trị vị trí này khi bộ truyền động di chuyển.

Một trong những điểm mạnh lớn nhất của chiết áp là nó cung cấp dấu hiệu về vị trí tuyệt đối của bộ truyền động tuyến tính. Do đó, phản hồi này có thể khá dễ dàng xử lý trong phần mềm của bộ điều khiển vì bạn có thể chỉ cần so sánh số đọc đầu ra hiện tại với số đọc đầu ra của vị trí mong muốn của bạn. Bạn cũng sẽ không bao giờ phải lo lắng về việc mất vị trí của bộ truyền động nếu bạn tắt hệ thống vì điện trở của chiết áp sẽ như nhau bất kể có cấp nguồn hay không.

Có một số hạn chế khi sử dụng chiết áp để phản hồi vị trí. Một nhược điểm là phản hồi từ chiết áp có thể bị ảnh hưởng bởi nhiễu điện và có thể yêu cầu bạn lọc tín hiệu để đạt được kết quả ổn định. Đầu ra của chiết áp cũng phụ thuộc vào điện áp đầu vào của chiết áp, điều này có thể gây khó khăn cho việc đảm bảo nhiều bộ truyền động tuyến tính chuyển động đồng thời vì tín hiệu đầu ra có thể thay đổi đôi chút do những thay đổi nhỏ ở điện áp đầu vào. Ngoài ra, chiết áp thường không nhạy với các chuyển động nhỏ hơn của bộ truyền động tuyến tính so với các tùy chọn phản hồi khác, khiến việc lặp lại kết quả trở nên khó khăn hơn.
Cảm biến hiệu ứng hall
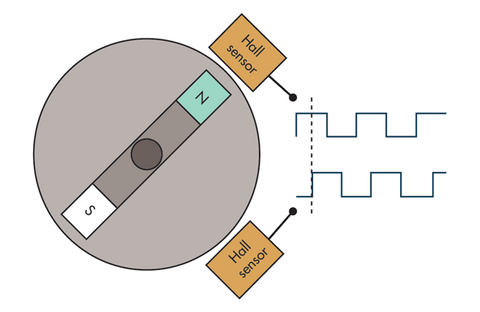
Cảm biến hiệu ứng Hall hoạt động dựa trên hiệu ứng Hall là tác dụng của từ trường tạo ra điện áp. Cảm biến hiệu ứng Hall có thể cung cấp đầu ra kỹ thuật số hoặc tuyến tính, nhưng đối với bộ truyền động tuyến tính, chúng thường sử dụng cảm biến hiệu ứng Hall đầu ra kỹ thuật số. Khi những cảm biến này phát hiện từ trường, chúng sẽ tạo ra một điện áp mà bộ điều khiển có thể đọc được [1]. Với bộ truyền động tuyến tính, các cảm biến này được đặt bên trong hộp số của bộ truyền động cùng với một đĩa từ. Khi bộ truyền động tuyến tính di chuyển, đĩa từ này sẽ quay đi qua cảm biến hiệu ứng Hall tạo ra xung điện áp. Những xung này có thể được sử dụng để xác định bộ truyền động đã di chuyển được bao xa. Nói chung, bộ truyền động tuyến tính sử dụng cảm biến hiệu ứng Hall để cung cấp phản hồi vị trí sẽ chỉ định xung truyền trên mỗi inch mà bạn có thể sử dụng để xác định khoảng cách mà bộ truyền động di chuyển. Ví dụ: nếu bạn phát hiện 6000 xung và bộ truyền động của bạn có xung trên mỗi inch di chuyển là 12000, điều đó có nghĩa là bộ truyền động của bạn đã di chuyển 0,5 inch.
Nhược điểm chính của việc sử dụng cảm biến hiệu ứng Hall để phản hồi vị trí so với chiết áp là cảm biến hiệu ứng Hall không đo được vị trí tuyệt đối. Thay vào đó, chúng tạo ra các xung có thể được đếm để xác định xem bộ truyền động đã di chuyển được bao xa, điều này đòi hỏi bạn phải biết bộ truyền động bắt đầu từ đâu để xác định vị trí tuyệt đối. Điều này có thể được khắc phục trong phần mềm của bộ điều khiển, như trong Arduino, bằng cách lưu trữ vị trí hiện tại của bộ truyền động và luôn khởi động bộ truyền động từ một vị trí đã biết, chẳng hạn như được rút lại hoàn toàn. Điều này có thể yêu cầu bạn đặt bộ truyền động về vị trí đã biết này mỗi khi bạn bật hệ thống.
Điểm mạnh của việc sử dụng cảm biến hiệu ứng Hall cho phản hồi vị trí là nó cung cấp độ phân giải cao hơn nhiều so với phản hồi từ chiết áp. Vì có thể có 1000 xung trên mỗi inch chuyển động, cảm biến hiệu ứng Hall mang lại độ chính xác và độ tin cậy trong việc định vị bộ truyền động tuyến tính của bạn. Các xung cũng sẽ thay đổi tần số dựa trên tốc độ của bộ truyền động tuyến tính, nghĩa là bạn có thể sử dụng chúng để đo tốc độ của bộ truyền động tuyến tính. Cảm biến hiệu ứng Hall cũng cung cấp khả năng lớn hơn để đảm bảo nhiều bộ truyền động tuyến tính di chuyển đồng thời vì số xung chính xác hơn điện áp thay đổi của chiết áp. Sử dụng của chúng tôi Bộ điều khiển truyền động FA-SYNC-X, bạn thậm chí có thể đảm bảo các bộ truyền động chuyển động đồng bộ bất kể tải trọng.
Cảm biến quang học
Cảm biến quang học được sử dụng trong bộ truyền động tuyến tính (có các loại cảm biến quang học khác) có chức năng rất giống với cảm biến hiệu ứng Hall ngoại trừ chúng phát hiện ánh sáng bằng bộ tách sóng quang [2]. Cảm biến quang hoạt động bằng cách cho ánh sáng từ đèn LED hoặc một số nguồn sáng khác được truyền qua đĩa mã hóa. Đĩa mã hóa này có rãnh để cho phép ánh sáng đi qua nó một cách định kỳ. Ở phía bên kia của đĩa là bộ tách sóng quang, có nhiệm vụ phát hiện ánh sáng khi nó đi qua các khe trên đĩa và tạo ra tín hiệu đầu ra [3]. Khi bộ truyền động di chuyển, đĩa mã hóa quay và ánh sáng được phát hiện bởi bộ tách sóng quang tạo ra xung điện áp. Các xung này có thể được sử dụng tương tự như các xung của cảm biến hiệu ứng Hall để xác định bộ truyền động đã di chuyển được bao xa. Bộ truyền động tuyến tính sử dụng cảm biến quang học để phản hồi vị trí cũng sẽ chỉ định xung di chuyển trên mỗi inch mà bạn có thể sử dụng để xác định khoảng cách mà bộ truyền động di chuyển.

Một lần nữa, Cảm biến quang học có những điểm mạnh và nhược điểm tương tự như cảm biến hiệu ứng Hall khi so sánh với chiết áp. Chúng có độ chính xác và độ phân giải cao hơn, thậm chí còn lớn hơn cảm biến hiệu ứng Hall và có thể được sử dụng để đo tốc độ của bộ truyền động tuyến tính. Chúng cũng tốt hơn trong việc đảm bảo nhiều bộ truyền động tuyến tính của bạn di chuyển đồng thời và có thể tận dụng Bộ điều khiển truyền động FA-SYNC-X. Chúng cũng không đo vị trí tuyệt đối mà thay vào đó yêu cầu bạn đếm xung để xác định xem bộ truyền động của bạn đã di chuyển được bao xa. Bạn cũng cần phải bắt đầu ở một vị trí đã biết vì bạn sẽ cần lưu vị trí hiện tại trong phần mềm để theo dõi vị trí tuyệt đối.
Bản tóm tắt
Sự lựa chọn của bạn về loại phản hồi bạn muốn từ thiết bị truyền động tuyến tính sẽ phụ thuộc vào những gì bạn cảm thấy quan trọng hơn đối với ứng dụng của bạn. Bạn có cần độ chính xác cao không? Chọn bộ truyền động tuyến tính có cảm biến hiệu ứng quang học hoặc hiệu ứng Hall. Bạn không muốn phải đặt bộ truyền động của mình ở vị trí ban đầu mỗi khi bật nó lên? Sau đó đi với một bộ truyền động tuyến tính có chiết áp. Bạn có muốn điều khiển nhiều bộ truyền động tuyến tính cùng một lúc không? Chọn bộ truyền động tuyến tính có cảm biến hiệu ứng quang học hoặc hiệu ứng Hall. Bạn có muốn phản hồi của bạn cung cấp một vị trí tuyệt đối? Đi với một bộ truyền động tuyến tính với một chiết áp.
[1] Monari, G. (Tháng 6, 2013) Hiểu độ phân giải trong bộ mã hóa quang và từ. Lấy ra từ: https://www.electronicdesign.com/technologies/components/article/21798142/understanding-resolution-in-optical-and-magnetic-encoders
[2] Paschotta, R. Bài viết về Cảm biến quang học. Lấy ra từ:https://www.rp-photonics.com/optical_sensors.html



