Electric motors have long dominated the robotics landscape, but their inherent limitations—particularly in energy efficiency and dynamic motion—have created bottlenecks in achieving truly agile, biomimetic robotic systems. Researchers at Stanford University have developed a groundbreaking solution that reimagines how actuators can deliver power: a spring-assisted mechanism that stores and releases energy with remarkable efficiency, consuming a fraction of the power required by conventional electric motors while maintaining the precision and versatility needed for complex robotic tasks. Published in Science Robotics, this innovation represents more than incremental improvement—it signals a fundamental shift in how we approach motion control in robotics.
🎥 Video — Reimagining Robotics with Spring-Assisted Actuators
For engineers and manufacturers working with linear actuators and motion control systems, this research opens fascinating new possibilities. While traditional industrial actuators excel at controlled, steady motion, Stanford's spring-assisted design addresses one of robotics' most persistent challenges: how to achieve explosive, dynamic movements without massive energy consumption or oversized motors. This breakthrough has profound implications across industries—from manufacturing automation to space exploration—wherever weight, power, and agility constraints intersect.
Understanding how spring-assisted actuation works, where it excels, and how it compares to established electric actuation technologies provides valuable context for anyone working in robotics, automation, or motion control systems. This article examines the engineering principles behind Stanford's innovation and explores its potential to reshape robotic design philosophy.

How Spring-Assisted Actuators Work
The fundamental principle behind Stanford's spring-assisted actuator is deceptively simple: store mechanical energy in springs when movement isn't required, then release it explosively when action is needed. This approach mimics biological muscle-tendon systems, where elastic tendons store energy during movement preparation and release it to amplify muscle power output.
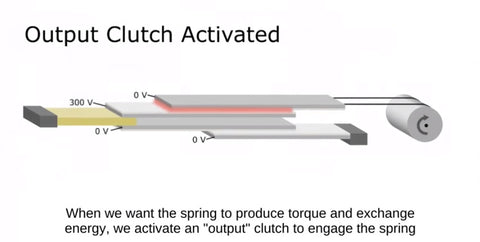
Unlike conventional electric motors that must continuously supply power throughout a motion cycle, the spring-assisted design operates in two distinct phases. During the loading phase, a small motor gradually compresses the spring mechanism—a low-power operation that can occur slowly over several seconds. When rapid motion is required, an electromagnetic clutch releases the stored spring energy, delivering instantaneous high force without the power surge that would be required from a direct-drive motor.
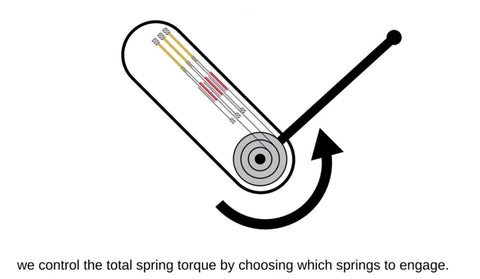
The system's efficiency gains are substantial. Traditional electric motors must be sized for peak power requirements, which in dynamic robotics applications can be 10-20 times higher than average operating power. This oversizing creates weight penalties and constant energy waste during non-peak operations. The spring-assisted approach decouples peak power delivery from continuous electrical input, allowing the use of much smaller, more efficient motors for the charging cycle while still achieving explosive movements through stored mechanical energy.
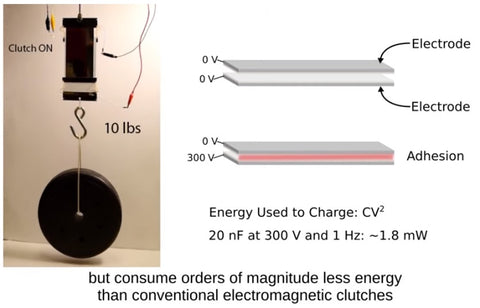
The clutch mechanism represents a critical innovation in the design. It must engage and disengage cleanly at precise moments, withstand the shock loads from spring release, and operate reliably through thousands of cycles. Stanford's team developed an electromagnetic clutch system that can be controlled with millisecond precision, enabling the actuator to deliver programmed force profiles ranging from gentle, controlled movements to explosive jumps.
Engineering Advantages Over Conventional Actuators
When compared to standard electric linear actuators, spring-assisted designs offer several distinct performance characteristics that make them particularly suited for specific applications. Understanding these advantages helps clarify where this technology might prove most valuable.
Power-to-Weight Ratio
Perhaps the most dramatic advantage is the improved power-to-weight ratio. Because the electric motor only needs to charge the spring system rather than deliver peak power directly, it can be significantly downsized. In Stanford's prototypes, the actuators achieved force outputs 5-10 times greater than would be possible from a direct-drive motor of equivalent weight. For mobile robotics, aerial drones, and space applications where every gram matters, this represents a transformative capability.
Energy Efficiency in Cyclic Operations
In applications involving repetitive dynamic movements—such as robotic walking, jumping, or throwing—spring-assisted actuators demonstrate exceptional efficiency. The spring storage mechanism allows energy recovery during deceleration phases, similar to regenerative braking in electric vehicles. Tasks that require periodic bursts of high force separated by idle periods see the greatest efficiency gains, with energy consumption reductions of 50-70% compared to continuously powered electric motors.
Shock Load Management
Traditional electric actuators can struggle with sudden impact loads or the need to rapidly reverse direction. The spring-assisted design inherently absorbs shock through the spring's elastic properties, protecting both the motor and the mechanical transmission. This makes the system more robust in applications involving impacts, such as legged locomotion across rough terrain or robotic manipulation tasks where contact forces are unpredictable.
Applications Across Industries
The versatility of spring-assisted actuation opens possibilities across multiple sectors, each leveraging different aspects of the technology's performance envelope.
Manufacturing and Assembly Automation
In high-speed pick-and-place operations, where industrial robots must repeatedly accelerate and decelerate payloads, spring-assisted actuators could dramatically reduce energy costs while improving cycle times. The ability to preload springs during the approach phase and release energy during the actual pick operation enables faster movements with lower electrical infrastructure requirements. This is particularly relevant for facilities operating hundreds of robotic work cells, where aggregate energy savings translate to significant operational cost reductions.
For applications currently using feedback actuators in precise positioning tasks, hybrid systems could combine traditional electric control for fine positioning with spring assistance for rapid transit between positions, offering the best of both approaches.
Mobile Robotics and Legged Locomotion
Legged robots face a fundamental challenge: biological systems achieve efficient walking and running through elastic energy storage in tendons, but most robotic actuators lack this capability. Spring-assisted actuators directly address this limitation, enabling more biomimetic gaits that consume less power while achieving greater agility. Prototype quadruped and bipedal robots using this technology have demonstrated jumping heights and running speeds previously impossible with direct-drive motors of comparable weight.
Space Exploration and Extreme Environments
Weight constraints in spacecraft make every kilogram extraordinarily expensive—literally, at costs of $10,000-50,000 per kilogram to orbit. Spring-assisted actuators offer the potential to create more capable robotic systems within strict mass budgets. Additionally, the reduced electrical power requirements align well with the limited power generation capacity of solar panels or radioisotope thermoelectric generators on deep space missions.
The technology also shows promise for rescue robots operating in disaster zones where battery life is critical and the terrain demands dynamic movements like climbing over debris or jumping across gaps.
Prosthetics and Exoskeletons
Human-worn robotic systems must be lightweight, efficient, and capable of natural-feeling motion. Spring-assisted actuators align remarkably well with these requirements, potentially enabling prosthetic limbs that better replicate the spring-like function of biological ankles and knees during walking and running. Similarly, industrial exoskeletons designed to augment human strength could operate longer on battery power while providing stronger assistance during lifting tasks.

Design Considerations and Integration Challenges
Despite its advantages, spring-assisted actuation introduces engineering complexities that must be carefully managed in practical implementations.
Control System Complexity
Programming a spring-assisted actuator requires more sophisticated control logic than commanding a standard electric motor. The controller must coordinate spring compression, clutch engagement timing, and energy release profiles to achieve desired motion characteristics. This demands more advanced control box electronics and software, though modern microcontrollers and Arduino-based systems have sufficient processing power for most applications.
Position feedback becomes more critical in spring-assisted designs, as the explosive release phase makes open-loop control impractical for precision tasks. Integration with feedback actuators or external sensors is typically required for accurate positioning.
Mechanical Durability and Maintenance
Springs and clutches are wear components that will eventually require replacement, unlike brushless DC motors which can operate for tens of thousands of hours with minimal maintenance. The design must ensure these components are accessible for service and sized with appropriate safety factors to achieve acceptable operational lifespans. Spring fatigue analysis and clutch wear modeling become critical aspects of the engineering process.
Packaging and Form Factor
Adding springs and clutches increases mechanical complexity compared to a simple electric motor and gearbox. Engineers must carefully optimize the mechanical layout to minimize overall package size while maintaining serviceability. In space-constrained applications, this can present significant challenges, though the weight savings often justify slightly larger volumes.
Comparison With Established Actuation Technologies
To contextualize where spring-assisted actuators fit within the broader landscape of motion control technologies, it's helpful to compare their characteristics against established solutions.
Electric Linear Actuators
Standard electric linear actuators excel at controlled, repeatable positioning across moderate force ranges. They offer excellent precision, simple control interfaces, and long service life with minimal maintenance. However, their power-to-weight ratio and efficiency during dynamic operations cannot match spring-assisted designs. For applications requiring steady, controlled motion rather than explosive movements, traditional electric actuators remain the optimal choice.
Micro linear actuators and bullet actuators fill niches where compact size and simple installation matter more than peak power output, spaces where spring assistance would add unnecessary complexity.
Hydraulic and Pneumatic Systems
Fluid power systems achieve high force density and can deliver explosive movements, but require extensive auxiliary equipment (pumps, compressors, reservoirs, plumbing) that makes them impractical for mobile or compact applications. Spring-assisted actuators offer comparable dynamic performance with electrical simplicity and compact packaging, making them attractive alternatives for applications transitioning away from hydraulics.
Series Elastic Actuators
Series elastic actuators (SEAs), which place a spring between the motor and load, share some conceptual similarity with spring-assisted designs but serve different purposes. SEAs primarily provide compliance for safe human-robot interaction and force control, not energy storage for improved efficiency. Spring-assisted actuators use clutches to selectively engage stored energy, enabling distinct performance characteristics optimized for power delivery rather than compliance.
Future Development and Commercialization Prospects
While Stanford's research demonstrates compelling laboratory results, the path from academic prototype to commercially viable product involves substantial engineering development. Several factors will influence how quickly this technology reaches practical deployment.
Material Science Advancements
Next-generation spring materials with higher energy density and longer fatigue life will enable more compact, durable designs. Carbon fiber composite springs, shape memory alloy elements, and advanced steel formulations are all under investigation. Similarly, electromagnetic clutch technology continues to improve, with newer designs offering faster response times and longer service intervals.
Cost Reduction Through Manufacturing Scale
Initial spring-assisted actuators will likely carry price premiums over conventional electric actuators due to additional components and manufacturing complexity. However, as production volumes increase and designs mature, costs should decline substantially. The technology may first gain traction in high-value applications like aerospace and advanced robotics before expanding to broader industrial automation.
Standardization and Ecosystem Development
For widespread adoption, manufacturers will need to develop standard form factors, mounting brackets, control interfaces, and integration guidelines. The ecosystem of compatible controllers, power supplies, and software tools will need to mature before integrators feel comfortable specifying spring-assisted actuators for production systems.
Implications for Motion Control Engineering
Spring-assisted actuation represents a philosophical shift in how engineers approach motion system design. Rather than viewing actuators purely as electrically-powered force generators, this technology encourages thinking about energy flow throughout a complete motion cycle—where energy can be stored, when it must be released, and how mechanical systems can be optimized around these dynamics.
For designers working with track actuators, slide rails, and linear motion systems, this might inspire hybrid architectures that combine spring assistance for rapid transit with precision electric control for final positioning. Such systems could dramatically improve cycle times in applications from automated warehouse systems to medical imaging equipment.
The technology also suggests new optimization opportunities in applications currently using multiple actuator types. A robotic work cell might employ spring-assisted actuators for dynamic pick-and-place operations while using conventional industrial actuators for precise assembly tasks, with each actuator type selected for its optimal performance envelope.
Conclusion
Stanford University's spring-assisted actuator innovation represents a significant advance in robotic motion control, offering dramatic improvements in power-to-weight ratio and energy efficiency for dynamic applications. By decoupling peak power delivery from continuous electrical input through clever use of spring energy storage and clutch mechanisms, the technology addresses fundamental limitations that have constrained robotic system design for decades.
While challenges remain in commercialization, durability validation, and ecosystem development, the engineering principles are sound and the potential applications compelling. Industries ranging from manufacturing automation to space exploration stand to benefit from actuators that can deliver explosive movements without the weight and energy penalties of oversized electric motors.
For engineers, integrators, and manufacturers working in motion control, this development serves as a reminder that fundamental innovations in actuation are still possible, and that the optimal solution for tomorrow's applications may look quite different from today's established technologies. Whether spring-assisted actuators become the dominant technology for a subset of applications or inspire broader hybrid approaches combining multiple actuation principles, they expand the toolkit available for solving complex motion control challenges.
Frequently Asked Questions
How much energy do spring-assisted actuators save compared to conventional electric motors?
Energy savings depend heavily on the application's duty cycle and motion profile. In laboratory testing, Stanford's spring-assisted actuators consumed 50-70% less energy than equivalent direct-drive electric motors in dynamic tasks involving repetitive jumping, throwing, or rapid acceleration movements. The greatest efficiency gains occur in applications with distinct active and idle phases, where the spring can be slowly charged during idle periods and rapidly released when needed. Continuous motion applications with steady loads see minimal benefit, as there's no opportunity to leverage the energy storage advantage. For comparison, typical linear actuators operating in cyclic positioning tasks might see 30-40% energy reductions if redesigned with spring assistance, though this requires careful system optimization.
What maintenance do spring-assisted actuators require?
Spring-assisted actuators have more wear components than simple electric motors, primarily the spring elements and electromagnetic clutches. Springs experience fatigue loading with each compression cycle and will eventually require replacement, typically after hundreds of thousands to millions of cycles depending on design stress levels. Clutches also wear over time and may need service every few years in high-duty-cycle applications. The electric motor component generally requires minimal maintenance, similar to brushless motors in conventional industrial actuators. Design engineers must ensure wear components are accessible for inspection and replacement, and establish maintenance schedules based on cycle counting and condition monitoring. Proper lubrication of mechanical components and periodic inspection for spring set or clutch slippage are essential to maintaining performance and preventing unexpected failures.
Can spring-assisted actuators achieve the same positioning precision as standard electric actuators?
Precision positioning with spring-assisted actuators is more challenging than with direct-drive electric systems due to the explosive nature of spring energy release. During the release phase, controlling exact position requires sophisticated feedback systems and damping mechanisms. However, hybrid approaches can achieve excellent precision by using spring assistance for rapid transit between positions and switching to direct electric drive for final approach and positioning. This combines the speed and efficiency advantages of spring assistance with the precision control of electric actuation. Applications requiring micron-level positioning, such as those using micro actuators, would typically use spring assistance only for gross motion and rely on conventional electric drive for fine positioning. The control system complexity increases, but modern Arduino-based controllers and industrial PLCs have sufficient processing power to manage this effectively.
Are spring-assisted actuators suitable for vertical lifting applications?
Spring-assisted actuators can excel in certain vertical lifting scenarios but face challenges in others. For applications involving repetitive lifting cycles—such as palletizing robots that raise and lower payloads continuously—spring assistance can recover energy during the lowering phase and release it during lifting, significantly improving efficiency. However, applications requiring extended static holding of loads in raised positions may see reduced benefits, as the spring cannot remain compressed indefinitely without stress relaxation. Systems like TV lifts or standing desks that must hold position for extended periods would need additional locking mechanisms or continuous motor power, reducing the energy advantage. The technology is better suited for dynamic lifting tasks with frequent up-down cycles rather than static elevation applications. Careful analysis of the specific duty cycle is essential to determine if spring assistance provides meaningful benefits over conventional electric actuation.
What are the size and weight differences between spring-assisted and conventional actuators?
Spring-assisted actuators typically achieve 40-60% weight reductions compared to conventional electric motors sized for equivalent peak power output, primarily because the electric motor only needs to charge the spring rather than deliver peak power directly. However, the spring and clutch mechanisms add volume and some weight back, so the overall package may be 10-20% larger in volume while remaining significantly lighter. The weight advantage becomes more pronounced in high-power applications where direct-drive motors would need to be very large. In compact applications where bullet actuators or small linear actuators are currently used, adding spring mechanisms might actually increase overall size without providing sufficient performance benefits to justify the complexity. The technology offers the greatest packaging advantages in medium to high-power applications where weight reduction is critical, such as mobile robotics, aerospace, and wearable exoskeletons.



