chiết áp
Chiết áp, là các điện trở thay đổi, được sử dụng trong các bộ truyền động tuyến tính để cung cấp cơ sở phản hồi vị trí về mức độ thay đổi điện trở của chúng. Các bộ truyền động tuyến tính sử dụng chiết áp để phản hồi, như của chúng tôi Thiết bị truyền động tuyến tính thanh phản hồi, sẽ bao gồm 3 dây bổ sung như hình bên dưới, dây 1 cho điện áp đầu vào, dây 2 là dây Biến đổi điện trở và dây 3 nối đất. Bạn có thể đọc đầu ra của chiết áp bằng cách đo điện áp giữa dây 2, đầu ra và mặt đất, điều này sẽ cung cấp dấu hiệu về vị trí tuyệt đối của bộ truyền động tuyến tính. Để sử dụng phản hồi này, bạn sẽ cần sử dụng một số loại bộ vi điều khiển, chẳng hạn như Arduino, để đọc giá trị vị trí này khi bộ truyền động di chuyển.

Phản hồi vị trí từ chiết áp
Khi điện trở thay đổi của chiết áp thay đổi khi bộ truyền động tuyến tính di chuyển, chênh lệch điện áp giữa dây 2 và mặt đất sẽ thay đổi. Do đó, phản hồi có thể dễ dàng được xử lý trong phần mềm của bộ điều khiển, chẳng hạn như Arduino, vì bạn có thể so sánh đơn giản điện áp đầu ra của dây 2 với đất. Khi sử dụng Arduino, điều này có thể được thực hiện một cách đơn giản bằng cách sử dụng chân analog của bộ vi điều khiển và sử dụng hàm analogRead() để đọc điện áp từ dây 2. Một ví dụ về cách kết nối Arduino với bộ truyền động tuyến tính có phản hồi chiết áp được hiển thị dưới.

Analog trong các chân của Arduino là các bộ chuyển đổi tương tự sang số (ADC), sẽ chuyển đổi điện áp tương tự trên dây 2 thành giá trị ADC 10 bit nằm trong khoảng từ 0 đến 1023. Giá trị ADC 10 bit có nghĩa là bộ chuyển đổi sẽ dịch tín hiệu tương tự sang 2^10 hoặc 1024 giá trị riêng biệt nằm trong khoảng từ 0 đến 1023. Không phải tất cả các bộ vi điều khiển đều là ADC 10 bit, một số là 8 bit hoặc 16 bit và số bit càng lớn thì độ phân giải của ADC càng lớn. Khi bạn đã chuyển đổi tín hiệu tương tự thành giá trị số, để xác định giá trị vị trí theo chiều dài hành trình, chẳng hạn như tính bằng inch, bạn sẽ cần tìm phạm vi tương tự chính xác của bộ truyền động tuyến tính cụ thể vì nó có thể không nằm trong khoảng từ 0 đến 1023. Điều này là do hộp số bên trong bộ truyền động ngăn chiết áp quay hoàn toàn đến giới hạn của nó và có nghĩa là bạn sẽ cần xác định phạm vi này theo cách thủ công. Đối với ví dụ mã hóa dưới đây, Chiều dài hành trình 4” Bộ truyền động tuyến tính thanh phản hồi có giá trị tương tự là 44 tại 0” và giá trị tương tự là 951 tại 4”. Sử dụng các giá trị này, bạn có thể sử dụng tỷ lệ để xác định giá trị độ dài hành trình như bên dưới:

Điều này có thể được đơn giản hóa thành Độ dài hành trình = 0,00441*(Giá trị tương tự – 44), giống như trong ví dụ mã hóa bên dưới. Tần suất bạn đọc giá trị tương tự này trong mã của bộ vi điều khiển là một điều quan trọng cần cân nhắc. Trong ví dụ mã bên dưới, Arduino đọc chiết áp và cập nhật giá trị vị trí miễn là bộ truyền động đang di chuyển. Nhưng bạn cũng có thể sử dụng bộ hẹn giờ bên trong để cập nhật giá trị vị trí trong một khoảng thời gian đã đặt hoặc bạn có thể chỉ cần đặt chức năng đọc chiết áp bên trong vòng lặp chính của mã và liên tục cập nhật giá trị vị trí. Mặc dù cách thứ hai không được khuyến khích nếu bạn dự định sử dụng bộ điều khiển của mình để thực hiện nhiều chức năng riêng lẻ.
https://gist.github.com/OMikeGray/4dec9e075a8fe41efaea001fa1e98d70
Xử lý tiếng ồn điện
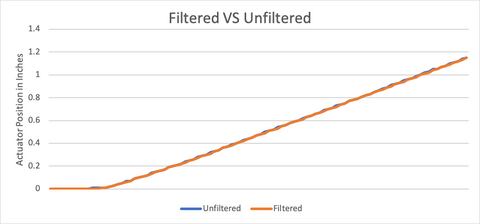
Một nhược điểm của phản hồi từ chiết áp là nó có thể bị ảnh hưởng bởi nhiễu điện và có thể làm cho giá trị vị trí của bạn không ổn định. Một cách để khắc phục điều này là sử dụng bộ lọc kỹ thuật số để loại bỏ nhiễu điện và đạt được kết quả ổn định. Có một số loại bộ lọc khác nhau có thể được sử dụng từ bộ lọc hàm mũ đến bộ lọc thông cao và thông dải, mỗi loại đều có những lợi ích riêng, nhưng đối với nhiều ứng dụng có bộ truyền động tuyến tính, chỉ cần sử dụng giá trị trung bình đang chạy của giá trị vị trí sẽ hoạt động. Giá trị trung bình đang chạy chỉ đơn giản là giá trị trung bình của X lần đo cuối cùng để làm mịn tín hiệu đầu vào. Số lượng phép đo chính xác mà bạn muốn tính trung bình sẽ tùy thuộc vào ứng dụng của bạn và bạn có thể cần phải thử nghiệm với con số này để xác định số đo nào hoạt động tốt nhất. Một số điều cần lưu ý, nếu bạn có quá ít số đo ở mức trung bình, tín hiệu của bạn sẽ vẫn bị nhiễu, nhưng nếu bạn có quá nhiều số đo, kết quả của bạn sẽ tụt hậu quá xa so với vị trí thực tế của bộ truyền động để có thể sử dụng được. Việc tìm ra sự cân bằng giữa quá ít và quá nhiều phép đo sẽ giúp bộ lọc của bạn hoạt động hiệu quả. Dưới đây là biểu đồ thể hiện tác động của bộ lọc trung bình đang chạy so với tín hiệu đầu vào thực tế.
Mã được sử dụng để thực hiện mức trung bình đang chạy được hiển thị bên dưới, nó sử dụng trung bình của 3 phép đo để làm mịn tín hiệu đầu vào. Ba phép đo đã được chọn vì không có nhiều nhiễu trong tín hiệu đầu vào thực tế, do đó chỉ cần một vài phép đo để làm mịn giá trị. Nếu có nhiều nhiễu hơn trong tín hiệu đầu vào thì cần phải thực hiện số lượng phép đo lớn hơn. Trong trường hợp có nhiều bộ phận cảm ứng (tức là động cơ), nhiễu điện sẽ là một vấn đề lớn hơn nhiều.
https://gist.github.com/OMikeGray/b13f156c080a100a89e5bbd541d0565e
Sử dụng phản hồi cho tự động hóa
Điều tuyệt vời khi triển khai phản hồi vào thiết kế của bạn là nó cho phép bạn tạo ra một hệ thống tự động có thể biết vị trí của một đầu vào nhất định. Để sử dụng phản hồi chiết áp trong hệ thống tự động, bạn chỉ cần so sánh độ dài mong muốn của bộ truyền động tuyến tính với vị trí thực tế được đưa ra bởi chiết áp. Sau đó, bạn chỉ cần yêu cầu bộ truyền động kéo dài hoặc thu lại cho phù hợp. Mặc dù việc sử dụng phản hồi chiết áp trong hệ thống tự động có một số vấn đề mà bạn có thể cần phải khắc phục. Một là vấn đề nhiễu điện đã được thảo luận ở trên, hai là khả năng đạt được kết quả có thể lặp lại. Vì chiết áp thường không nhạy với những chuyển động nhỏ hơn của bộ truyền động tuyến tính nên so với các tùy chọn phản hồi khác, điều này khiến việc đạt được kết quả lặp lại chính xác trở nên khó khăn hơn. Trong thực tế, điều này có nghĩa là bạn sẽ có một sai số nhất định xung quanh vị trí mong muốn của mình, điều này có thể chấp nhận được đối với ứng dụng cụ thể của bạn. Nếu bạn không cần định vị quá chính xác hoặc đang thay thế công tắc thủ công bằng bộ vi điều khiển để tự động hóa hệ thống của mình thì phản hồi vị trí từ chiết áp sẽ đủ chính xác cho bạn. Nếu bạn thực sự cần định vị chính xác từ bộ truyền động tuyến tính của mình thì bạn có thể cần phải xem xét các tùy chọn phản hồi khác cho bộ truyền động tuyến tính của bạn hoặc thêm các thành phần bổ sung để mang lại kết quả đáng tin cậy hơn. Những thành phần này bao gồm cảm biến hoặc công tắc giới hạn bên ngoài có thể cung cấp cho bạn chỉ báo tốt hơn về vị trí tuyệt đối.

Không thể đạt được kết quả lặp lại cũng là một vấn đề khi bạn điều khiển nhiều bộ truyền động tuyến tính. Vì tín hiệu đầu ra của chiết áp dễ bị ảnh hưởng bởi nhiễu điện, bao gồm nhiễu điện từ các bộ truyền động khác và phụ thuộc vào điện áp đầu vào của chiết áp, nên việc đảm bảo nhiều bộ truyền động tuyến tính di chuyển đồng thời có thể là một thách thức. Việc sử dụng các bộ lọc kỹ thuật số, đảm bảo điện áp đầu vào ổn định cho chiết áp và đặt dây tín hiệu đầu ra cách xa các bộ phận cảm ứng khác sẽ giúp đảm bảo kết quả lặp lại nhiều hơn. Mặc dù vậy, nếu bạn muốn chạy nhiều bộ truyền động cùng lúc, tốt hơn hết bạn nên kiểm tra các tùy chọn phản hồi khác cho bộ truyền động tuyến tính.



