پتانسیل سنج
پتانسیلومترها ، که مقاومت متغیر هستند ، در محرک های خطی استفاده می شوند تا پایه بازخورد موقعیتی را در مورد تغییر مقاومت آنها ارائه دهند. محرک های خطی که از پتانسیلومترها برای بازخورد استفاده می کنند ، مانند ما بازخورد میله خطی خطی، شامل 3 سیم اضافی مانند نشان داده شده در زیر ، سیم 1 برای ولتاژ ورودی ، سیم 2 است متغیر مقاومت و سیم 3 برای زمین است. شما می توانید با اندازه گیری ولتاژ بین سیم 2 ، خروجی و زمین ، خروجی پتانسیلومترها را بخوانید ، که نشانگر موقعیت مطلق محرک خطی است. برای استفاده از این بازخورد ، باید از نوعی میکروکنترلر مانند یک استفاده کنید سر و صدا، برای خواندن این مقدار موقعیتی با حرکت محرک.

بازخورد موقعیتی از پتانسیلومتر
از آنجا که مقاومت متغیر پتانسیلومتر با حرکت محرک خطی تغییر می کند ، اختلاف ولتاژ بین سیم 2 و زمین تغییر می کند. به همین دلیل ، بازخورد را می توان به راحتی در نرم افزار یک کنترلر مانند Arduino انجام داد ، زیرا می توانید به سادگی ولتاژ خروجی سیم 2 را با زمین مقایسه کنید. با استفاده از یک آردوینو ، این کار به سادگی می تواند با استفاده از یک آنالوگ در پین میکروکنترلر و استفاده از تابع Analogread () برای خواندن ولتاژ از سیم انجام شود. نمونه ای از نحوه اتصال یک آردوینو به یک محرک خطی با بازخورد پتانسیومتر نشان داده شده است. در زیر

آنالوگ در پین های سر و صدا مبدلهای آنالوگ به دیجیتال (ADC) هستند ، که ولتاژ آنالوگ را بر روی سیم 2 به مقدار ADC 10 بیتی تبدیل می کند که بین 0 تا 1023 خواهد بود. یک مقدار ADC 10 بیتی به معنای مبدل است که سیگنال آنالوگ را به آن تبدیل می کند 2^10 یا 1024 مقادیر متمایز از 0 تا 1023. همه میکروکنترلرها ADC 10 بیتی نیستند ، برخی از آنها 8 بیتی یا 16 بیتی هستند و هرچه تعداد بیت ها بیشتر باشد ، وضوح ADC بیشتر است. هنگامی که سیگنال آنالوگ را به یک مقدار دیجیتالی تبدیل کردید ، برای تعیین مقدار موقعیت از نظر طول سکته مغزی ، مانند اینچ ، باید دامنه آنالوگ دقیق محرک خطی خاص خود را پیدا کنید زیرا ممکن است از 0 تا متغیر نباشد 1023. این به دلیل گیربکس در داخل محرک است که مانع از پتانسیومتر به طور کامل به حد آن می شود و به این معنی است که شما باید این دامنه را به صورت دستی تعیین کنید. برای مثال کدگذاری زیر ، بازخورد 4 اینچی بازخورد میله محرک خطی مقدار آنالوگ 44 در 0 "و مقدار آنالوگ 951 در 4" داشت. با استفاده از این مقادیر ، می توانید از نسبت ها برای تعیین مقدار طول سکته مغزی مانند زیر استفاده کنید:

این می تواند به طول سکته مغزی = 0.00441*(مقدار آنالوگ - 44) ، مانند مثال کدگذاری زیر ساده شود. هر چند وقت یک بار این مقدار آنالوگ را در کد میکروکنترلر خود می خوانید ، نکته مهم دیگری است. در مثال کد زیر ، Arduino پتانسیلومتر را می خواند و مقدار موقعیت را تا زمانی که محرک حرکت می کند به روز می کند. اما شما همچنین می توانید از تایمرهای داخلی برای به روزرسانی مقدار موقعیت در فاصله زمانی مشخص زمان استفاده کنید یا می توانید به سادگی عملکرد خواندن پتانسیلومتر را در داخل حلقه اصلی کد قرار دهید و به طور مداوم مقدار موقعیت را به روز کنید. اگرچه اگر قصد دارید از کنترلر خود برای انجام چندین کارکرد جداگانه استفاده کنید ، مورد دوم توصیه نمی شود.
https://gist.github.com/OMikeGray/4dec9e075a8fe41efaea001fa1e98d70
برخورد با سر و صدای الکتریکی
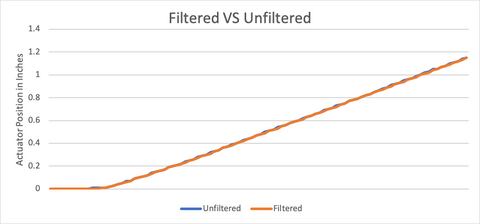
یکی از اشکالات بازخورد از پتانسیلومتر این است که می تواند تحت تأثیر نویز الکتریکی قرار گیرد و ممکن است مقدار موقعیتی شما را ناپایدار کند. یکی از راه های غلبه بر این ، استفاده از فیلتر دیجیتال برای از بین بردن نویز الکتریکی و دستیابی به نتایج پایدار است. انواع مختلفی از فیلترهای مختلف وجود دارد که می تواند از فیلترهای نمایی گرفته تا فیلترهای پر عبور و گذر با هر یک با مزایای خاص خود استفاده شود ، اما برای بسیاری از برنامه های کاربردی با محرک های خطی ، صرفاً استفاده از میانگین در حال اجرا از ارزش موقعیتی کار خواهد کرد. میانگین در حال اجرا به سادگی میانگین آخرین مقدار X برای صاف کردن سیگنال ورودی است. تعداد دقیق اندازه گیری هایی که می خواهید به طور متوسط به برنامه شما بستگی داشته باشد و ممکن است لازم باشد با این شماره بازی کنید تا مشخص شود چه چیزی بهتر است. چند مورد که باید از آن آگاه باشید ، اگر اندازه گیری های بسیار کمی در میانگین خود داشته باشید ، سیگنال شما همچنان پر سر و صدا خواهد بود ، اما اگر اندازه گیری های زیادی داشته باشید ، نتایج شما خیلی عقب مانده از موقعیت واقعی محرک است تا قابل استفاده باشد. این تعادل بین اندازه گیری های بسیار اندک و بیش از حد است که باعث می شود فیلتر شما مؤثر باشد. در زیر نقشه ای نشان داده شده است که تأثیر یک فیلتر متوسط در حال اجرا در مقابل سیگنال ورودی واقعی است.
کد مورد استفاده برای پیاده سازی میانگین در حال اجرا در زیر نشان داده شده است ، به طور متوسط از 3 اندازه گیری برای صاف کردن سیگنال ورودی استفاده می کند. سه اندازه گیری انتخاب شد زیرا در سیگنال ورودی واقعی سر و صدای زیادی وجود ندارد ، بنابراین فقط برای صاف کردن مقدار فقط به چند اندازه گیری مورد نیاز بود. اگر سر و صدای بیشتری در سیگنال ورودی وجود داشته باشد ، تعداد بیشتری از اندازه گیری ها مورد نیاز است. در شرایطی که بسیاری از اجزای القایی زیادی وجود دارد (یعنی موتورها) نویز الکتریکی یک مشکل بسیار بزرگتر خواهد بود.
https://gist.github.com/OMikeGray/b13f156c080a100a89e5bbd541d0565e
استفاده از بازخورد برای اتوماسیون
نکته جالب در مورد اجرای بازخورد در طراحی شما این است که به شما امکان می دهد یک سیستم خودآورده شده ایجاد کنید که می داند برای یک ورودی معین کجا باشد. برای استفاده از بازخورد پتانسیلومتر در یک سیستم خودکار ، می توانید به سادگی طول تمایل خود را از محرک خطی خود با موقعیت واقعی که توسط پتانسیلومتر داده می شود مقایسه کنید. سپس شما به سادگی باید به محرک خود بگویید که بر این اساس تمدید یا عقب نشینی کند. اگرچه استفاده از بازخورد پتانسیلومتر در یک سیستم خودکار ، چند مورد دارد که ممکن است برای غلبه بر آنها نیاز داشته باشید. یکی مسئله سر و صدای الکتریکی است که در بالا مورد بحث قرار گرفت ، دیگری قادر به دستیابی به نتایج قابل تکرار است. از آنجا که به طور کلی پتانسیلومترها نسبت به حرکات کوچکتر محرک خطی حساس نیستند ، در مقایسه با سایر گزینه های بازخورد ، این امر دستیابی به نتایج قابل تکرار دقیق را دشوارتر می کند. در عمل ، این بدان معنی است که شما در مورد موقعیت مورد نظر خود حاشیه خطایی خواهید داشت ، که ممکن است برای برنامه داده شده شما قابل قبول باشد. اگر نیازی به موقعیت های بسیار دقیق ندارید یا برای خودکار سازی سیستم خود یک سوئیچ دستی را با میکروکنترلر جایگزین می کنید ، بازخورد موقعیتی از یک پتانسیلومتر به اندازه کافی برای شما دقیق خواهد بود. اگر از محرک خطی خود به موقعیت دقیق نیاز دارید ، ممکن است لازم باشد در نظر بگیرید گزینه های بازخورد دیگر برای محرک خطی خود یا مؤلفه های اضافی را برای ارائه نتایج قابل اطمینان تر اضافه کنید. این مؤلفه ها شامل سنسورها یا سوئیچ های حد خارجی که ممکن است نشانگر بهتری از موقعیت مطلق به شما بدهد.

عدم دستیابی به نتایج قابل تکرار نیز هنگام کنترل چندین محرک خطی ، مسئله ای است. از آنجا که سیگنال خروجی پتانسیلومتر به راحتی تحت تأثیر نویز الکتریکی ، از جمله سر و صدای الکتریکی از سایر محرک ها قرار می گیرد و به ولتاژ ورودی به پتانسیلومتر بستگی دارد ، اطمینان از حرکت چندین محرک خطی به طور همزمان می تواند چالش برانگیز باشد. استفاده از فیلترهای دیجیتال ، تضمین ولتاژ ورودی پایدار به پتانسیلومتر ، و داشتن سیم های سیگنال خروجی که از سایر اجزای القایی فرار می کنند ، همه به اطمینان از نتایج قابل تکرار کمک می کنند. اگرچه ، اگر می خواهید به طور همزمان چندین محرک را اجرا کنید ، ممکن است بهتر باشد که گزینه های بازخورد دیگر برای محرک های خطی.



