Dự án này chỉ cho bạn cách tận dụng điều khiển từ xa TiVo và bảng Arduino để vận hành bộ truyền động tuyến tính nhằm nâng bức tranh che TV. Xem video ở cuối
Công cụ yêu cầu
Các công cụ sau đây sẽ được yêu cầu để hoàn thành dự án này.
- Tua vít Phillips #0
- Mỏ hàn
- Hàn
- Máy cắt dây
- Kìm nhỏ (Tôi sử dụng kìm được thiết kế để làm việc với các thiết bị điện tử nhỏ)
Danh sách các bộ phận
Các phần sau đây là cần thiết để hoàn thành dự án này.
- Thiết bị truyền động đường ray hạng nặng từ Firgelli Tự động hóa
- Điều khiển từ xa TiVo Roamio
- Arduino Uno Rev 3
- Hộp dự án Hammond 1591ESBK ABS màu đen (7.5” x 4.3” x 2.2”)
- Microtivity IB171 Bo mạch mini 170 điểm cho Arduino
- Bộ thu hồng ngoại 2,5–5,5V 38kHz
- 100 Chiếc Michael Josh 20CM M/F Dây Nhảy Dây Cáp 1 Ổ Cắm Nam Đến Nữ
- Mô-đun chuyển tiếp 2 kênh SainSmart
- Cáp USB 2.0 — A-Male tới B-Male
- 4 feet dây phun nước đen 18/5
- 8 ốc vít máy không gỉ số lượng #4–40 x 2” (Tôi đã mua chúng từ Home Depot)
- 8 số lượng đai ốc vít máy Everbuild # 4–40 (Tôi đã mua chúng từ Home Depot)
- 16 miếng đệm nylon qty ½” (tôi đã mua chúng từ Home Depot)
- 1 số lượng cà vạt có khóa kéo
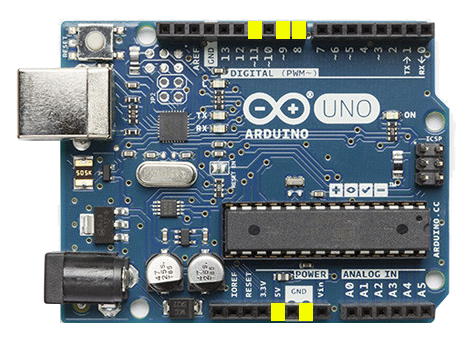
Thiết lập Arduino Uno Rev 3
Chúng ta sẽ sử dụng các chân sau trên bo mạch Arduino được đánh dấu màu vàng.
- Nguồn 5V
- Kỹ thuật số số 8
- Kỹ thuật số số 9
- Kỹ thuật số #11
- điện GND
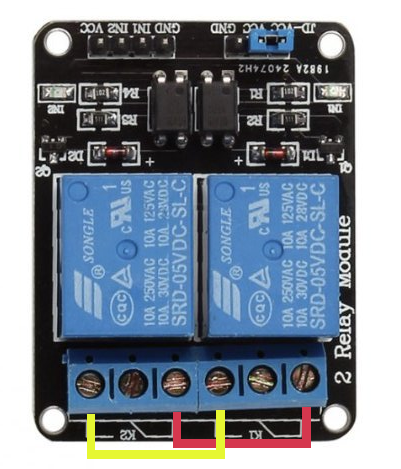
Thiết lập module rơ le 2 kênh SainSmart
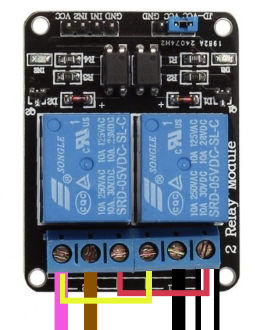
Chúng ta phải nhảy mô-đun rơle SainSmart để trùng với Firgelli Thiết bị truyền động tuyến tính tự động hóa. Có một jumper màu xanh từ JD-VCC đến VCC. Để nguyên chỗ này.
Nhảy K1 vị trí 1 đến K2 vị trí 1
Đặt dây nhảy từ vị trí đầu tiên trên rơle K1 đến vị trí đầu tiên trên rơle K2. Jumper của chúng tôi được hiển thị bằng màu đỏ.

Nhảy K1 vị trí 3 đến K2 vị trí 3
Đặt dây nhảy từ vị trí thứ ba trên rơle K1 đến vị trí thứ ba trên rơle K2. Jumper của chúng tôi được hiển thị bằng màu vàng.

Khi nhảy đúng cách, bạn sẽ thấy cấu hình sau.
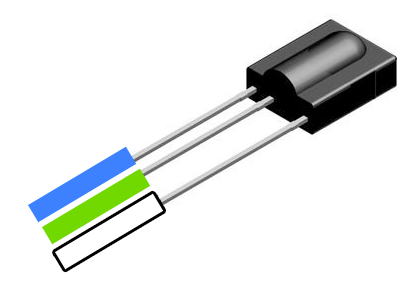
Cài đặt cảm biến hồng ngoại
Cảm biến hồng ngoại có ba dây đi ra từ nó. Một cái dành cho dây nối đất, một cái dành cho dây nguồn 5V và cái thứ ba gửi tín hiệu đến bo mạch Arduino của chúng ta.
Bóc bỏ hai inch tấm chắn bên ngoài trên dây phun nước 18–5 để lộ các dây màu bên trong. Chúng ta sẽ chỉ sử dụng các dây màu xanh lá cây, trắng và xanh lam nên hãy cắt bỏ những dây khác để không phải làm phiền chúng.
Tước ⅛” lớp cách điện trên mỗi dây mà chúng ta sẽ sử dụng. Chúng sẽ được hàn vào rơle bằng cách sử dụng cấu hình sau. Khi nhìn vào cảm biến từ trên xuống với phần lồi tròn hướng về phía bạn:
- Hàn dây màu xanh vào cực bên trái.
- Hàn dây màu xanh lá cây vào đầu cuối giữa.
- Hàn dây màu trắng vào cực bên phải.
Thiết lập bộ dây của bộ truyền động tuyến tính
Bộ truyền động tuyến tính đi kèm với một điều khiển từ xa có dây với hai nút tam giác. Một nút kích hoạt công tắc di chuyển bộ truyền động tuyến tính lên và nút còn lại di chuyển nó xuống.
Tháo thân bo mạch điều khiển từ xa
Việc đầu tiên là tháo các dây ở phía sau điều khiển từ xa. Những thứ này sẽ cần được loại bỏ bằng tuốc nơ vít phillips # 0.
Tháo bảng mạch ra khỏi thân điều khiển từ xa và kiểm tra dây dẫn. Nhìn từ dưới lên thì có bốn dây được hàn vào bảng. Từ trái sang phải có màu đen, trắng, tím và nâu như hình bên dưới.
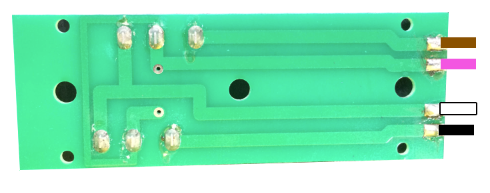
Nếu vì lý do nào đó họ sử dụng các màu khác nhau, bạn chỉ cần theo dõi các màu theo thứ tự như dưới đây.
Hàn lại dây
Dùng mỏ hàn tháo dây ra khỏi bảng mạch. Nhẹ nhàng ấn đầu mũi hàn vào vật hàn hiện có trên điểm hàn để nới lỏng nó và dùng một chiếc kìm nhỏ nhẹ nhàng kéo dây ra khỏi điểm hàn.
Gắn dây vào rơle
Bây giờ chúng ta sẽ gắn dây từ điều khiển từ xa có dây vào rơle 2 kênh SainSmart. Sử dụng tuốc nơ vít Phillips số 0 để tháo thiết bị đầu cuối rồi siết chặt lại để cố định dây.
- Dây trắng sẽ đi vào K1 vị trí 1
- Dây màu đen sẽ đi vào vị trí K1 số 2
- Dây màu nâu sẽ đi vào vị trí K2 số 2
- Dây màu tím sẽ đi vào vị trí K2 số 3
Lưu ý: không tháo dây nhảy hiện có. Để chúng vào khi bạn vặn vào các thiết bị đầu cuối.
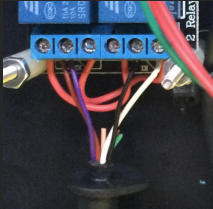
Khi thực hiện xong nó sẽ trông giống như những hình ảnh trên.
Đấu dây cho bảng mạch
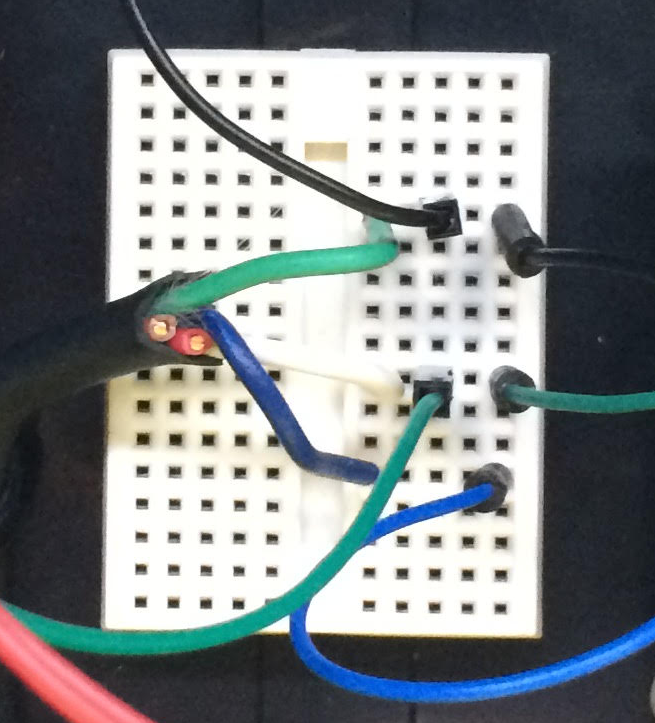
Bây giờ chúng ta sẽ nối bo mạch Arduino vào bảng mạch bánh mì. Breadboard cho phép chúng ta nhảy các kết nối trong đó có nhiều kết nối được thực hiện với một thiết bị đầu cuối trên Arduino hoặc trên rơle.
Mỗi hàng lỗ được kết nối với nhau cho phép chúng ta nhảy mọi thứ trên hàng đó. Dưới đây là những mục mà chúng ta sẽ cần nối dây.
Nguồn 5V
- Sử dụng dây nhảy nam-nữ từ thiết bị đầu cuối Power 5V trên Arduino đến hàng không sử dụng trên bảng mạch. Đẩy nó vào một lỗ trên hàng.
- Sử dụng dây nhảy nam-nữ từ cùng hàng trên breadboard đến cực VCC trên rơle 2 kênh SainSmart. Đẩy nó vào một lỗ trên cùng một hàng.
- Để lộ ¼” dây trắng từ phía bên kia của dây phun nước 18–5. Đẩy nó vào một lỗ trên cùng một hàng.
Đất
- Sử dụng dây nhảy nam-nữ từ thiết bị đầu cuối Power GND trên Arduino đến hàng không sử dụng trên bảng mạch. Đẩy nó vào một lỗ trên hàng.
- Sử dụng dây nhảy nam-nữ từ cực GND trên rơle 2 kênh SainSmart đến lỗ trên cùng hàng với dây GND còn lại. Đẩy nó vào lỗ trên cùng một hàng.
- Để lộ ¼” dây màu xanh lá cây từ phía bên kia của dây phun nước 18–5. Đẩy nó vào một lỗ trên cùng một hàng.
báo hiệu
- Sử dụng dây nhảy nam-nữ từ thiết bị đầu cuối Digital #11 trên Arduino đến hàng không sử dụng trên bảng mạch. Đẩy nó vào một lỗ trên hàng.
- Để lộ ¼” dây màu xanh lam từ phía bên kia của dây phun nước 18–5. Đẩy nó vào một lỗ trên cùng một hàng.
Khi hoàn tất, bảng mạch sẽ trông giống như hình ảnh sau đây.
Cài đặt chương trình điều khiển trên Arduino
Bạn sẽ cần phải tải xuống và cài đặt Arduino IDE. Khi bạn đã tải xuống và cài đặt IDE, hãy mở IDE.
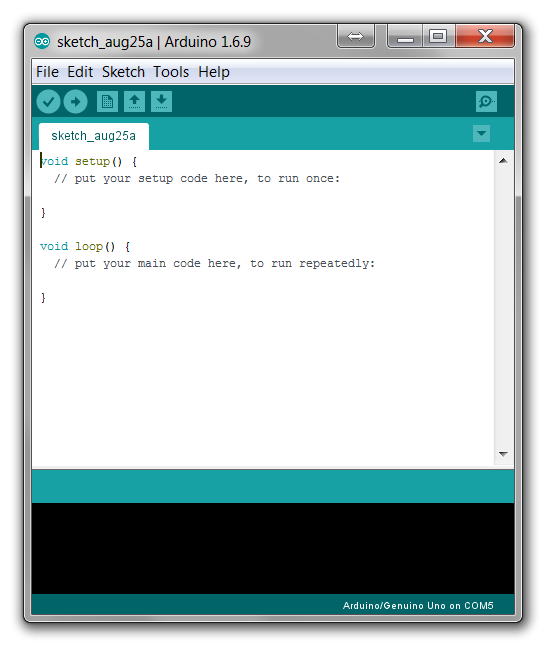
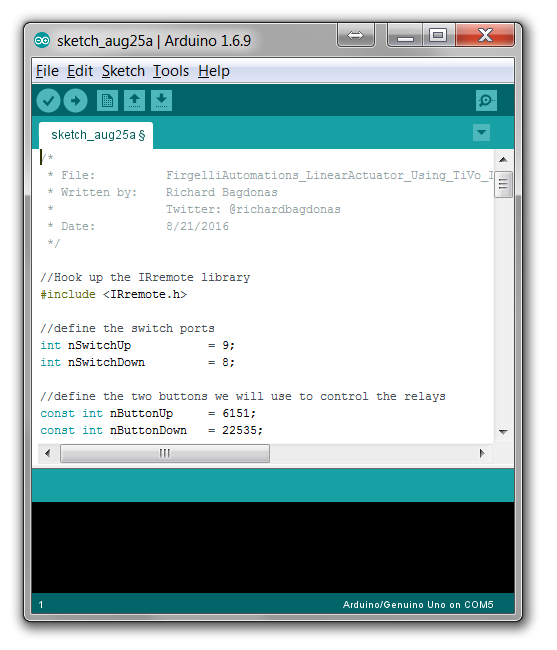
Sao chép và dán mã vào IDE
Tải xuống hoặc sao chép mã nguồn từ GitHub và dán nó vào cửa sổ IDE. Khi hoàn tất, cửa sổ này sẽ trông như thế này.
Điều chỉnh tệp IRremote.cpp
Có một tệp trong thư mục C:\Program Files (x86)\Arduino\libraries\RobotIRremote\src\ có vấn đề về mã nguồn ngăn mã nguồn GitHub biên dịch. Mở tệp IRremoteTools.cpp trong trình soạn thảo văn bản đơn giản như notepad và thay đổi dòng sau:
Dòng 5 sẽ có dạng:
int RECV_PIN = TKD2; // chân mà bộ thu IR được kết nối với
Thay đổi nó thành như sau và lưu tập tin.
int RECV_PIN = 11; // chân mà bộ thu IR được kết nối với
Kết nối arduino với máy tính của bạn bằng cáp USB
Đặt Arduino, bảng mạch bánh mì và bảng chuyển tiếp trên bề mặt không dẫn điện, chẳng hạn như bàn gỗ.
Kết nối mặt hình chữ nhật của cáp USB với máy tính của bạn và mặt “D” với bo mạch Arduino.
Chọn cổng
Chọn mục menu Công cụ - Cổng và chọn mục hiển thị bảng Arduino của bạn.
Tải mã lên
Chọn mục menu Phác thảo - Tải lên để tải mã lên Arduino.
Kiểm tra mã
Sau khi mã đã được tải lên, hãy cắm bộ dây điện từ Firgelli Tự động hóa bộ truyền động tuyến tính trở lại bộ truyền động và cắm bộ truyền động.
Giữ bo mạch Arduino được cắm vào máy tính của bạn thông qua cáp USB.
Trỏ điều khiển từ xa TiVo của bạn vào cảm biến hồng ngoại và nhấp vào nút “thích” bằng ngón tay cái màu xanh lá cây. Bộ truyền động sẽ di chuyển lên.
Trỏ điều khiển từ xa TiVo của bạn vào cảm biến hồng ngoại và nhấp vào nút “không thích” bằng ngón tay cái màu đỏ. Bộ truyền động sẽ di chuyển xuống.
Đóng hộp tất cả lại
Tôi đã sử dụng hộp dự án Hammond cùng với vít máy, miếng đệm và đai ốc vít máy để chứa các bảng mạch của mình. Tôi dùng một đầu nhọn trên que hàn để chọc các lỗ xuyên qua hộp nhựa màu đen cũng như tạo khoảng trống cho các dây dẫn xuyên qua các cạnh. Tôi dùng dây buộc zip để giữ cho dây cảm biến hồng ngoại không bị tuột ra ngoài. Các dây điều khiển trên Firgelli Thiết bị truyền động tuyến tính tự động hóa có một miếng cao su được thiết kế để ngăn chúng bị kéo ra ngoài nên tôi có thể tận dụng nó.
Giới thiệu về tác giả
Richard Bagdonas là chuyên gia tích hợp dữ liệu với hơn 15 năm kinh nghiệm tích hợp với điểm bán hàng, hồ sơ sức khỏe điện tử, quản lý quan hệ khách hàng và hệ thống quản lý kho hàng. Richard đã mày mò về điện tử từ khi còn nhỏ và đây là dự án Arduino đầu tiên của anh.
Richard hiện là Kiến trúc sư trưởng về chăm sóc sức khỏe tại MI7, nơi ông giám sát việc tích hợp của công ty với hệ thống hồ sơ sức khỏe điện tử.



