Điều chế độ rộng xung (PWM)
1. Khái niệm cơ bản về điều chế độ rộng xung (PWM)
Điều chế độ rộng xung (PWM) đóng vai trò là phương pháp kỹ thuật số mô phỏng tín hiệu tương tự để điều khiển việc cung cấp năng lượng cho các thiết bị điện tử. Về bản chất,PWM nhanh chóng chuyển đổi nguồn giữa trạng thái BẬT và TẮT ở tần số đã đặt, cho phép quản lý công suất trung bình, mang lại nhiều khả năng điều khiển.2. Khoa học đằng sau xung điện xung
Khi chúng tôi chia nhỏ nó ra, chức năng của nó khá giống với một công tắc đèn. Khái niệm này bắt nguồn từ việc bật và tắt tín hiệu một cách nhanh chóng. Với các khoảng thời gian khác nhau, người ta có thể thao tác và mô phỏng các mức công suất đầu ra khác nhau. Do đó, trong bối cảnh điện tử rộng lớn,PWM quản lý hiệu quả công suất trung bình mà một thiết bị cảm nhận được và cuối cùng nhận được.3. Động cơ DC và xung điện tử: Sự kết hợp giữa điện tử
Tính linh hoạt củaPWM cho phép nó điều khiển vô số động cơ DC:• Động cơ DC chổi than: Những động cơ này đơn giản và phản ứng trực tiếp với tín hiệu điều khiển từ xa, chuyển chúng thành các tốc độ khác nhau.
• Động cơ DC không chổi than (BLDC): Động cơ BLDC phức tạp hơn một chút yêu cầu các chuỗi xung điều chỉnh xung điện được tùy chỉnh cho từng cuộn dây của chúng.
Tuy nhiên, điều quan trọng là phải hiểu rằng mặc dù các nguyên tắc cơ bản củaPWM có thể áp dụng phổ biến nhưng các thiết kế động cơ riêng lẻ có thể ảnh hưởng sâu sắc đến phản ứng của chúng đối vớiPWM.
4. Sự phức tạp của đặc tính động cơ: Kích thước, quán tính và mô-men xoắn
Mỗi động cơ đều có đặc điểm riêng và tín hiệu điều khiển từ xa phải được tinh chỉnh để đáp ứng các sắc thái sau:• Kích thước và quán tính: Động cơ có kích thước vật lý lớn hơn hoặc quán tính cao hơn thường phản ứng chậm trước những thay đổi đột ngột của xung điện. Trong những trường hợp như vậy, người ta có thể cần phải điều chỉnh tần số hoặc thời lượng củaPWM để đảm bảo hoạt động trơn tru.
• Mô-men xoắn: Động cơ mô-men xoắn cao có thể cần tín hiệu điều khiển từ xa mạnh hơn hoặc kéo dài hơn. Điều quan trọng là phải hiệu chỉnh tín hiệuPWM sao cho phù hợp với mô-men xoắn của động cơ để đảm bảo hiệu suất tối ưu.
Những điều chỉnh này rất cần thiết để đảm bảo rằng động cơ phản ứng hài hòa với tín hiệu điều khiển từ xa, mở đường cho hoạt động hiệu quả và đáng tin cậy.
5. Phân tích tín hiệuPWM điển hình
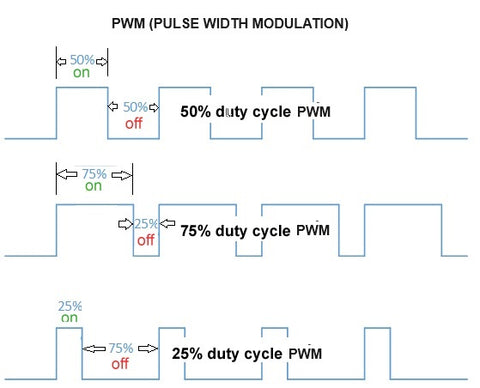
Tín hiệuPWM tiêu chuẩn có thể được hiển thị dưới dạng sóng vuông, bao gồm:• Tần số: Xác định tốc độ dao động của tín hiệu giữa trạng thái BẬT và TẮT. Nó được định lượng bằng Hertz (Hz).
• Đúng giờ: Biểu thị khoảng thời gian trong một chu kỳ mà tín hiệu vẫn hoạt động hoặc BẬT. Bằng cách thay đổi khía cạnh này, người ta có thể điều chỉnh hiệu quả công suất hướng tới động cơ và do đó điều chỉnh hoạt động của nó.
6. Các FIRGELLI FCB-1: Một ví dụ thực tế về khả năng làm chủ CPU
Một đại diện hữu hình về tiềm năng củaPWM được tóm tắt bằng FIRGELLI FCB-1:• Kiểm soát tốc độ: FCB-1 khai thác sức mạnh củaPWM để điều chỉnh tốc độ chính xác của bộ truyền động. Điều này đảm bảo hoạt động trơn tru và hiệu quả trong các ứng dụng khác nhau.
• Đồng bộ hóa: Một trong những tính năng vượt trội của FCB-1 là khả năng đồng bộ hóa tối đa bốn bộ truyền động. Thông qua việc điều khiển tỉ mỉ, nó đảm bảo rằng mỗi bộ truyền động hoạt động đồng thời, mang lại chuyển động hài hòa.



