Sau khi hoàn tất việc nhấp nháy đèn LED theo những cách hoàn toàn độc đáo và tuyệt vời, bạn sẽ thực sự muốn tương tác với môi trường vật lý. Đây là lúc cần đến bộ truyền động tuyến tính. Nếu bạn muốn di chuyển thứ gì đó, mở thứ gì đó, xoay thứ gì đó thì bộ truyền động tuyến tính rất có thể là cách tốt nhất để làm điều đó. Và tại sao phải tự mình nâng, di chuyển, xoay vòng khi bạn có thể nhờ một bộ truyền động tuyến tính để thực hiện công việc khó khăn đó.
Chắc chắn bạn có thể nhấn nút trên điều khiển từ xa hoặc công tắc bật tắt, nhưng tại sao không có cảm biến chuyển động hoặc thậm chí là đồng hồ thời gian thực cho các sự kiện dựa trên thời gian.
Nếu bạn mới làm quen với Arduino, bạn có thể không biết rằng bạn không thể kết nối một động cơ lớn với các chân của bo mạch và bắt đầu di chuyển nó. Bạn phải sử dụng một số cơ chế chuyển mạch để mang tải dòng điện cao. Bạn có thể sử dụng motor driver hoặc cầu H, nhưng cách đơn giản nhất, nhanh nhất là sử dụng một vài rơle hoặc bảng rơle. Bạn có hai lựa chọn khi sử dụng Arduino với bộ truyền động tuyến tính. Bạn chỉ có thể sử dụng bảng rơle để điều khiển nguồn điện đi tới bộ truyền động mà không có thông tin vị trí hoặc nếu bạn sử dụng một trong các bộ truyền động phản hồi FA-PO, bạn có thể xác định vị trí trục và tạo điều khiển vị trí vòng kín. Trong bài viết này chúng ta sẽ tập trung vào phương án đơn giản hơn, chỉ sử dụng rơle để điều khiển bộ truyền động và không có thông tin vị trí.
Đảm bảo bạn sử dụng rơle (hoặc bảng chuyển tiếp) với rơle SPDT. Rơle SPDT (cung đôi cực đơn) có ba kết nối cho mỗi rơle. Chung, thường mở, thường đóng. Chúng ta sẽ đi vào chi tiết hơn về rơle trong một bài viết khác, chỉ cần đảm bảo rằng bạn có rơle SPDT nếu không nó sẽ không hoạt động. Bạn cần hai rơle SPDT để điều khiển bộ truyền động. Với hai rơle SPDT, bạn có thể khởi động, dừng và thay đổi hướng của bộ truyền động.
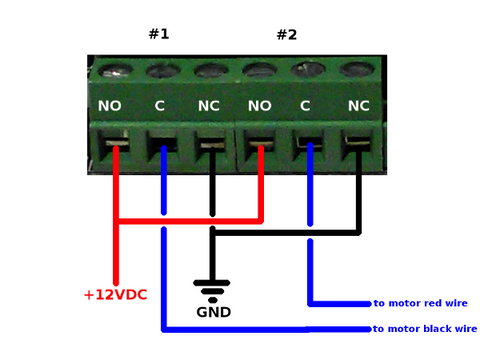
Như bạn có thể thấy trong sơ đồ nối dây bên dưới, bạn nối đất 12VDC với cực thường đóng của hai rơle và bạn kết nối +12VDC với cực thường mở của hai rơle. Bạn có thể tạo một điểm nối để chia mỗi dây thành hai hoặc sử dụng dây nhảy ngắn. Bạn kết nối hai dây dẫn động với thiết bị đầu cuối chung, một dây cho mỗi rơle.
Đối với mã Arduino, giả sử các chân số 2 và 3 dùng để điều khiển hai rơle. Bạn sẽ phải kiểm tra xem nó có gì trên bảng của bạn. Đây là đoạn mã đơn giản cho biết cách bạn có thể kéo dài, rút lại và dừng bộ truyền động tuyến tính.
const int RELAY_1_A = 2; const int RELAY_1_B = 3; void setup() { pinMode(RELAY_1_A, OUTPUT);int bộ truyền động) {pinMode(RELAY_1_B, OUTPUT);} trống rỗng loop() { //This is where your program logic goes //You can call the functions to control the //actuator here, as well as reading sensors, etc.. } trống rỗng mở rộngThiết bị truyền động(int bộ truyền động) { // Tắt một rơ-le và tắt cái kia // thao tác này sẽ di chuyển, mở rộng bộ truyền động Viết kỹ thuật số(RELAY_1_A, CAO); Viết kỹ thuật số(RELAY_1_B, THẤP); } trống rỗng rút lạiThiết bị truyền động(
// Tắt một rơle và bật rơle còn lại
// điều này sẽ di chuyển rút lại bộ truyền động
Viết kỹ thuật số(RELAY_1_A, THẤP);
Viết kỹ thuật số(RELAY_1_B, CAO);
}
trống rỗng dừngThiết bị truyền động(int bộ truyền động) {
// Tắt cả hai rơle
// điều này sẽ dừng bộ truyền động khi phanh
Viết kỹ thuật số(RELAY_1_A, THẤP);
Viết kỹ thuật số(RELAY_1_B, THẤP); }
Điều này sẽ giúp bạn tiếp tục sử dụng Arduino (hoặc bộ vi điều khiển khác) có rơle để điều khiển Firgelli Thiết bị truyền động tuyến tính tự động hóa.
Nếu bạn đang tìm kiếm bộ truyền động tuyến tính để bắt đầu, hãy gọi cho chúng tôi hoặc gửi email cho chúng tôi qua đường dây kỹ thuật của chúng tôi. Nếu bạn đang tìm kiếm một thiết bị truyền động mạnh mẽ, hãy tham khảo bộ truyền động tuyến tính dòng nhiệm vụ nhẹ chúng tôi mang theo, hoặc đơn vị nhiệm vụ nhẹ với phản hồi chiết áp. Đừng quên một nguồn điện 12VDC tốt có thể xử lý tải cảm ứng. MB1 giá đỡ cho bộ truyền động tuyến tính (MB1 cho dòng FA-150) sẽ giúp bạn tiết kiệm rất nhiều thời gian và tránh được sự thất vọng.



