Kiểm soát tốc độ thiết bị truyền động tuyến tính

Bộ truyền động tuyến tính đóng một vai trò quan trọng trong hoạt động trong các lĩnh vực khác nhau, bao gồm chăm sóc sức khỏe, sản xuất, nông nghiệp, ô tô và các lĩnh vực khác; do đó nhu cầu về độ chính xác và độ chính xác cao hơn là điều cần thiết. Bộ điều khiển tốc độ truyền động tuyến tính cung cấp các cơ chế điều khiển tối ưu để điều chỉnh chuyển động ở vận tốc mong muốn theo yêu cầu ứng dụng.
Chức năng chính của bộ điều khiển tốc độ bộ truyền động tuyến tính là điều chỉnh điện áp đầu vào cung cấp cho động cơ điện hoặc bộ truyền động trong khi vẫn đáp ứng yêu cầu tải ở công suất đầu ra lực tối đa - do đó đảm bảo hiệu quả cao hơn trong các hệ thống động.
Việc kiểm soát tốc độ truyền động tuyến tính đòi hỏi các cơ chế phức tạp như triển khai vòng điều khiển vận tốc bao gồm các vòng phản hồi thu được từ các cảm biến nhúng nhằm phát hiện những thay đổi về vị trí hoặc vận tốc--điều này giúp tạo ra kết quả tối ưu thông qua hiệu chuẩn. FIRGELLIBảng điều khiển thiết bị truyền động của có vòng phản hồi điều khiển tốc độ tích hợp sẵn giúp thiết lập các điều kiện vận hành tối ưu đồng thời đảm bảo các chuyển động chính xác cho các cải tiến hệ thống của bạn.

FIRGELLIBảng điều khiển Thiết bị truyền động của có vòng phản hồi điều khiển tốc độ tích hợp riêng nếu bạn yêu cầu hệ thống vòng kín phản hồi để kiểm soát tốc độ rất chính xác. Hộp điều khiển này chỉ có thể được sử dụng với Bộ truyền động tuyến tính được tích hợp cảm biến Phản hồi, chẳng hạn như Cảm biến Hall hoặc Cảm biến quang học, vì nó cần những cảm biến này để đo tốc độ của Bộ điều khiển.
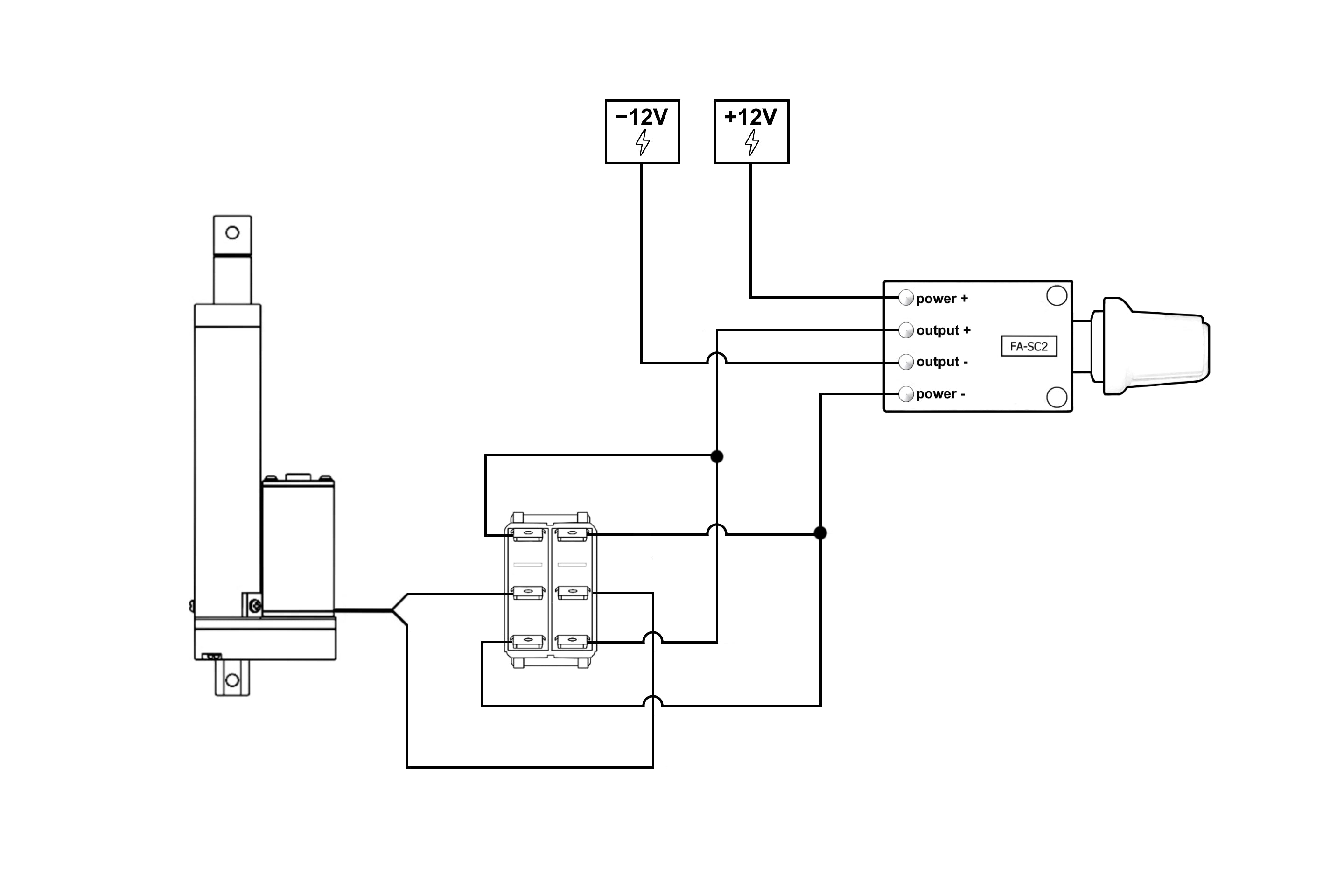
Để đảm bảo độ chính xác và tránh sai sót, các bộ truyền động tuyến tính được điều khiển bởi bộ điều khiển tốc độ liên tục theo dõi và đánh giá lại vận tốc của chúng. Sơ đồ nối dây sau đây minh họa cách kết nối bộ truyền động tuyến tính với công tắc bập bênh và bộ điều khiển tốc độ để có hiệu suất và khả năng điều khiển tối ưu.
Sơ đồ nối dây cho bộ điều khiển tốc độ và bộ truyền động
KIỂM SOÁT FEED- Forward
Trong bối cảnh của bộ truyền động tuyến tính và điều khiển tốc độ, điều khiển cấp tiến là một khái niệm quan trọng. Cách tiếp cận này hoạt động với giả định rằng, với tư cách là người điều khiển, người dùng có thể dự đoán chính xác đầu ra của bộ điều khiển tốc độ và thực hiện bất kỳ điều chỉnh cần thiết nào cho phù hợp. Mục đích chính của vòng điều khiển để điều chỉnh tốc độ là tối ưu hóa vận tốc của bộ truyền động để phù hợp với yêu cầu của một nhiệm vụ cụ thể. Với điều kiện là tất cả các biến số không đổi, điều khiển truyền tiếp cho phép người dùng đưa ra những dự đoán sáng suốt về mối quan hệ giữa chu kỳ làm việc của bộ truyền động và vận tốc của nó, dựa trên các giá trị cảm biến trên giây.
Bằng cách tính toán chu kỳ nhiệm vụ, người dùng có thể đạt được vận tốc mong muốn một cách chính xác đồng thời giảm thiểu sai sót trong ước tính. Cách tiếp cận này giảm thiểu nguy cơ vượt quá mục tiêu và hoàn toàn trượt mục tiêu hoặc dừng sớm trước khi tiếp cận mục tiêu, do đó làm suy yếu mục tiêu cơ bản của việc sử dụng bộ truyền động tuyến tính.
Cách bộ điều khiển tốc độ DC điều khiển tốc độ của bộ truyền động
Bộ điều khiển tốc độ DC sử dụng Điều chế độ rộng xung (PWM) là một thiết bị điện tử phức tạp được thiết kế để điều chỉnh tốc độ của Thiết bị truyền động DC. PWM là một kỹ thuật cho phép điều khiển điện áp trung bình cung cấp cho động cơ DC bằng cách BẬT và TẮT nguồn nhanh chóng ở tần số không đổi. Tốc độ của bộ truyền động DC có thể được điều chỉnh bằng cách điều chỉnh thời gian BẬT (chu kỳ nhiệm vụ) tương ứng với thời gian TẮT trong mỗi chu kỳ.
Dưới đây là tổng quan về cách hoạt động của bộ điều khiển tốc độ DC sử dụng xung điện để điều khiển tốc độ của bộ truyền động DC:
- Tính thường xuyên: Bộ điều khiển PLC tạo ra tín hiệu sóng vuông có tần số không đổi, bao gồm các khoảng thời gian BẬT và TẮT xen kẽ. Tần số này thường đủ cao để động cơ của bộ truyền động không nhận biết được hành động chuyển mạch, dẫn đến việc điều khiển tốc độ trơn tru.
- Chu kỳ nhiệm vụ: Các chu kỳ nhiệm vụ đề cập đến phần trăm thời gian tín hiệu vẫn ở trạng thái BẬT trong một chu kỳ. Bằng cách thay đổi chu kỳ làm việc, có thể kiểm soát được điện áp trung bình cung cấp cho động cơ của bộ truyền động. Chu kỳ nhiệm vụ cao hơn tương ứng với điện áp trung bình cao hơn, dẫn đến tốc độ của bộ truyền động nhanh hơn, trong khi chu kỳ nhiệm vụ thấp hơn dẫn đến điện áp trung bình thấp hơn và do đó, tốc độ của bộ truyền động chậm hơn.
- điều chế: Khi người dùng hoặc hệ thống tự động điều chỉnh tốc độ mong muốn của bộ truyền động DC, bộ điều khiển PLC sẽ điều chỉnh chu kỳ nhiệm vụ tương ứng. Điều này đảm bảo rằng điện áp trung bình thích hợp được cung cấp cho bộ truyền động, cho phép kiểm soát chính xác tốc độ của nó.
- Hiệu quả: Do bộ điều khiển tốc độ PLC chuyển đổi nhanh chóng giữa trạng thái BẬT hoàn toàn và TẮT hoàn toàn nên tổn thất năng lượng dưới dạng nhiệt được giảm thiểu. Điều này làm choPWM trở thành một phương pháp hiệu quả cao để kiểm soát tốc độ của bộ truyền động DC.
Tóm lại, bộ điều khiển tốc độ DC sử dụng PLC hoạt động bằng cách tạo ra tín hiệu sóng vuông với tần số không đổi và chu kỳ nhiệm vụ khác nhau. Bằng cách điều chỉnh chu kỳ hoạt động, bộ điều khiển sẽ điều chỉnh điện áp trung bình cung cấp cho động cơ của bộ truyền động DC, cho phép điều khiển chính xác tốc độ của nó trong khi vẫn duy trì hiệu suất năng lượng cao.
Tại sao bạn muốn sử dụng Bộ điều khiển tốc độ?
-
Kiểm soát chính xác: Lợi ích chính của bộ điều khiển tốc độ là khả năng cung cấp khả năng kiểm soát chính xác tốc độ của bộ truyền động. Tính năng này cho phép mọi người tinh chỉnh vận tốc của bộ truyền động, đảm bảo nó hoạt động tối ưu cho nhiệm vụ hoặc ứng dụng cụ thể trước mắt. Bằng cách đạt được tốc độ mong muốn một cách chính xác, bạn có thể nâng cao hiệu suất và tính hiệu quả tổng thể của hệ thống.
-
Khả năng thích ứng: Các ứng dụng khác nhau thường yêu cầu các yêu cầu về tốc độ khác nhau hoặc cần phải điều chỉnh trong quá trình vận hành. Các FIRGELLI bộ điều khiển tốc độ cung cấp cho bạn sự linh hoạt để dễ dàng sửa đổi và điều chỉnh tốc độ của bộ truyền động để đáp ứng nhu cầu riêng của từng ứng dụng. Khả năng thích ứng này cho phép các kỹ sư tối ưu hóa hiệu suất hệ thống trong các tình huống khác nhau.
-
Vận hành êm ái: Bộ điều khiển tốc độ, đặc biệt là những bộ sử dụng công nghệ Điều chế độ rộng xung (PWM) mà hầu hết các bộ điều khiển tốc độ thích hợp đều sử dụng, mang lại lợi thế là mang lại khả năng kiểm soát trơn tru và nhất quán đối với tốc độ của bộ truyền động. Hoạt động trơn tru này rất quan trọng vì nó giảm thiểu ứng suất cơ học và mài mòn trên bộ truyền động, từ đó kéo dài tuổi thọ sử dụng của nó.
-
Đồng bộ hóa: Một số ứng dụng nhất định cần chuyển động đồng bộ giữa nhiều bộ truyền động. Trong những trường hợp như vậy, bộ điều khiển tốc độ đóng vai trò then chốt trong việc duy trì tốc độ ổn định trên tất cả các bộ truyền động liên quan. Sự đồng bộ hóa này đảm bảo sự phối hợp chính xác và vận hành hài hòa, mang lại hiệu suất và chức năng tối ưu của toàn bộ hệ thống.
Âm thanh cao độ mà bạn nghe thấy phát ra từ bộ điều khiển tốc độ khi bạn giảm tốc độ xuống thấp hơn là gì?
Âm thanh cao mà bạn nghe thấy phát ra từ bộ điều khiển tốc độ khi bạn giảm tốc độ xuống thường là do tần số chuyển đổi của kỹ thuật Điều chế độ rộng xung (PWM) được sử dụng để điều chỉnh tốc độ của bộ truyền động gây ra.
Chế độ điều khiển xung xung điện bao gồm việc chuyển đổi nhanh chóng nguồn điện sang BẬT và TẮT động cơ ở tần số không đổi. Khi tốc độ giảm, chu kỳ hoạt động (tỷ lệ phần trăm thời gian tín hiệu ở trạng thái BẬT) giảm, khiến động cơ nhận được điện áp trung bình ít hơn. Trong một số trường hợp, tần sốPWM hoặc các sóng hài của nó có thể nằm trong phạm vi nghe được của thính giác con người (20 Hz đến 20 kHz).
Âm thanh có thể được tạo ra do sự rung động của cuộn dây động cơ hoặc các bộ phận khác trong bộ điều khiển tốc độ, chúng cộng hưởng ở tần sốPWM hoặc các sóng hài của nó. Sự rung động này được gây ra bởi sự giãn nở và co lại nhanh chóng của từ trường được tạo ra bởi dòng điện trong cuộn dây động cơ khi chúng chuyển đổi giữa trạng thái BẬT và TẮT.
Khi tốc độ được giảm xuống, chu kỳ làm việc sẽ giảm và động cơ nhận được ít năng lượng hơn trong mỗi chu kỳ chuyển mạch. Sự thay đổi công suất này có thể khiến tiếng ồn nghe được trở nên rõ ràng hơn. Ngoài ra, một số tần số cộng hưởng nhất định của hệ thống có thể dễ tạo ra tiếng ồn hơn, tùy thuộc vào đặc tính cơ và điện của động cơ và bộ điều khiển tốc độ.




