Potentiometer
Potentiometer, die variable Widerstände sind, werden in linearen Aktuatoren verwendet, um eine positionelle Rückkopplungsbasis dafür zu bieten, wie sich ihr Widerstand ändert. Lineare Aktuatoren, die Potentiometer für Feedback verwenden, wie unsere Feedback -Stange Linearer Aktuator, besteht aus den 3 zusätzlichen Drähten, wie unten gezeigt, Draht 1 für die Eingangsspannung, Draht 2 ist die Variable Widerstand und Draht 3 ist für den Boden. Sie können den Ausgang der Potentiometer durch Messen der Spannung zwischen Draht 2, Ausgang und Masse lesen, die einen Hinweis auf die absolute Position des linearen Aktuators liefern. Um dieses Feedback zu verwenden, müssen Sie eine Art Mikrocontroller wie eine verwenden Arduino, um diesen Positionswert zu lesen, während sich der Aktuator bewegt.

Positionsfeedback aus einem Potentiometer
Wenn sich der variable Widerstand des Potentiometers beim Umzug des linearen Aktuators ändert, ändert sich die Spannungsdifferenz zwischen Draht 2 und Masse. Aus diesem Grund kann das Feedback wie ein Arduino leicht in der Software eines Controllers behandelt werden, da Sie einfach die Ausgangsspannung von Draht 2 mit dem Boden vergleichen können. Unter Verwendung eines Arduino kann dies einfach erfolgen unter.

Das Analog in Stifte der Arduino sind Analog-zu-Digital-Konverter (ADC), die die analoge Spannung auf Draht 2 in einen 10-Bit-ADC-Wert umwandeln, der zwischen 0 und 1022 liegt 2^10 oder 1024 verschiedene Werte im Bereich von 0 bis 1023. Nicht alle Mikrocontroller sind 10-Bit-ADC, einige sind 8-Bit oder 16-Bit, und je größer die Anzahl der Bits ist, desto größer ist die Auflösung des ADC. Sobald Sie das analoge Signal in einen digitalen Wert umgewandelt haben, um einen Positionswert in Bezug auf die Schlaganfalllänge zu bestimmen, wie in Zoll 1023. Dies liegt an dem Getriebe innerhalb des Aktuators, der das Potentiometer verhindern, dass sich vollständig bis zu seinem Grenzwert dreht, und bedeutet, dass Sie diesen Bereich manuell bestimmen müssen. Für das nachstehende Codierungsbeispiel die folgenden 4 ”Strichlänge Rückkopplungsstange Linearer Aktuator hatte einen analogen Wert von 44 bei 0 ”und einen analogen Wert von 951 bei 4”. Mit diesen Werten können Sie Verhältnisse verwenden, um den Wert der Schlaganfalllänge wie unten zu bestimmen:

Dies kann in Schlaganfalllänge = 0,00441*(Analogwert - 44) vereinfacht werden, wie im folgenden Codierungsbeispiel. Wie oft Sie diesen analogen Wert im Code Ihres Mikrocontrollers lesen, ist eine weitere wichtige Überlegung. Im folgenden Codebeispiel liest der Arduino das Potentiometer und aktualisiert den Positionswert, solange sich der Aktuator bewegt. Sie können aber auch interne Timer verwenden, um den Positionswert über ein festgelegter Zeitintervall zu aktualisieren, oder Sie können die Potentiometer -Lesefunktion einfach innerhalb der Hauptschleife des Codes platzieren und den Positionswert kontinuierlich aktualisieren. Obwohl letzteres nicht empfohlen wird, wenn Sie vorhaben, Ihren Controller zu verwenden, um mehrere einzelne Funktionen auszuführen.
https://gist.github.com/OMikeGray/4dec9e075a8fe41efaea001fa1e98d70
Umgang mit elektrischem Rauschen
Ein Nachteil von Feedback aus dem Potentiometer besteht darin, dass es durch elektrische Rauschen beeinträchtigt werden kann und Ihren Positionswert instabil macht. Eine Möglichkeit, dies zu überwinden, besteht darin, einen digitalen Filter zu verwenden, um das elektrische Rauschen zu entfernen und stabile Ergebnisse zu erzielen. Es gibt nur wenige verschiedene Arten von Filtern, die von exponentiellen Filtern zu Hochpass- und Bandpassfiltern verwendet werden können, die jeweils ihre eigenen Vorteile haben, aber für viele Anwendungen mit linearen Aktuatoren funktioniert einfach ein laufender Durchschnitt des Positionswerts. Ein laufender Durchschnitt ist einfach der Durchschnitt der letzten x -Menge an Messungen, um das Eingangssignal zu glätten. Die genaue Anzahl der Messungen, die Sie durchschnittlich möchten, hängt von Ihrer Anwendung ab und Sie müssen möglicherweise mit dieser Nummer herumspielen, um festzustellen, was am besten funktioniert. Ein paar Dinge, die Sie sich bewusst sind, wenn Sie zu wenige Messungen im Durchschnitt haben, ist Ihr Signal immer noch laut, aber wenn Sie zu viele Messungen haben, bleiben Ihre Ergebnisse zu weit hinter der tatsächlichen Position des Stellantriebs zurück, um es zu nutzen. Es ist ein Gleichgewicht zwischen zu wenigen und zu vielen Messungen, die Ihren Filter wirksam machen. Im Folgenden finden Sie ein Diagramm, das den Effekt eines laufenden Durchschnittsfilters im Vergleich zum tatsächlichen Eingangssignal zeigt.
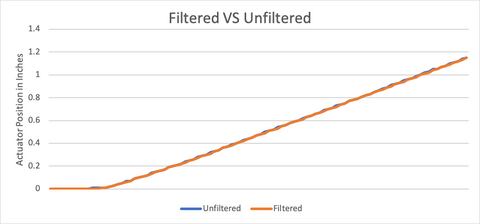
Der Code, der zur Implementierung des laufenden Durchschnitts verwendet wird, wird unten angezeigt. Er verwendet durchschnittlich 3 Messungen, um das Eingangssignal zu glätten. Es wurden drei Messungen ausgewählt, da das tatsächliche Eingangssignal nicht viel Rauschen auftrat, sodass nur wenige Messungen erforderlich waren, um den Wert zu glätten. Wenn das Eingangssignal mehr Rauschen gäbe, wäre eine größere Anzahl von Messungen erforderlich. In Situationen, in denen viele induktive Komponenten (d. H. Motoren) elektrisches Rauschen vorhanden sind, ist ein viel größeres Problem.
https://gist.github.com/OMikeGray/b13f156c080a100a89e5bbd541d0565e
Verwendung von Feedback zur Automatisierung
Das Tolle an der Implementierung von Feedback in Ihr Design ist, dass Sie ein selbstautomatisches System erstellen können, das weiß, wo Sie für eine bestimmte Eingabe sein sollen. Um das Potentiometer -Feedback in einem automatisierten System zu verwenden, können Sie einfach Ihren Verlangen mit der linearen Länge Ihres linearen Stellantriebs mit der tatsächlichen Position vergleichen, die durch das Potentiometer angegeben ist. Dann müssen Sie Ihren Aktuator lediglich sagen, er solle sich entsprechend ausdehnen oder zurückziehen. Die Verwendung von Potentiometer -Feedback in einem automatisierten System hat zwar einige Probleme, die Sie möglicherweise überwinden müssen. Das eine ist das Problem des oben diskutierten elektrischen Rauschens, das andere ist in der Lage, wiederholbare Ergebnisse zu erzielen. Da Potentiometer im Allgemeinen nicht so empfindlich gegenüber kleineren Bewegungen des linearen Aktuators im Vergleich zu den anderen Rückkopplungsoptionen sind, wird dies schwieriger, präzise wiederholbare Ergebnisse zu erzielen. In der Praxis bedeutet dies, dass Sie eine Fehlerquote in Bezug auf Ihre gewünschte Position haben, die für Ihre angegebene Anwendung möglicherweise akzeptabel ist. Wenn Sie keine sehr präzisen Positionierungen benötigen oder einen manuellen Schalter durch einen Mikrocontroller ersetzen, um Ihr System zu automatisieren, ist das positionelle Feedback eines Potentiometers genau genug für Sie. Wenn Sie eine genaue Positionierung von Ihrem linearen Aktuator benötigen, müssen Sie möglicherweise berücksichtigen Andere Feedback -Optionen Für Ihren linearen Aktuator oder zusätzliche Komponenten hinzufügen, um zuverlässigere Ergebnisse zu erzielen. Diese Komponenten umfassen Sensoren oder Externe Grenzschalter Dies kann einen besseren Indikator für die absolute Position geben.

Es ist auch ein Problem, wiederholbare Ergebnisse zu erzielen, wenn Sie mehrere lineare Aktuatoren kontrollieren. Da das Ausgangssignal des Potentiometers leicht durch elektrische Rauschen, einschließlich elektrischer Rauschen der anderen Aktuatoren, beeinflusst wird und von der Eingangsspannung zum Potentiometer abhängt, um sicherzustellen, dass sich mehrere lineare Aktuatoren gleichzeitig bewegen können, kann eine Herausforderung sein. Die Verwendung digitaler Filter, die Gewährleistung einer stabilen Eingangsspannung für das Potentiometer und die Ablauf der Ausgangssignaldrähte, die von anderen induktiven Komponenten weglaufen, können wiederholbarere Ergebnisse erzielen. Wenn Sie jedoch mehrere Aktuatoren gleichzeitig ausführen möchten, ist es möglicherweise besser, das zu überprüfen Andere Feedback -Optionen Für lineare Aktuatoren.



