新しい自動化プロジェクトは困難な場合があります。私たちは知っています。すべての技術用語、電気配線、コンピューター制御インターフェイス、その他のベルとホイッスルがあれば、どこにすべきかを知るのは難しい場合があります始める!不確実性がプロジェクトの進行を妨げている場合、基本に戻り、プロジェクトの要件を確認すると、前進するルートが表示されます。私は知識が力だと言いたいのですが理解 通貨です。
新しい自動化プロジェクトを開始したり、線形アクチュエーターを既存のプロジェクトに再設備して置き換えると、これらの質問は、プロジェクトにどのアクチュエータが機能するかを判断するのに役立ちます。
- アプリケーションとは何ですか?
- アクチュエーターを既存のデザインまたは製品に入れていますか?
- 新しいプロジェクトをゼロから設計していますか?
- ユニットの負荷は何ですか、それとも、どのくらいの力が必要ですか?*
- アクチュエータの重量評価は向上します 軸荷重のみ。非線形アプリケーション(ヒンジなど)の場合、軸荷重を計算する必要がある場合があります。
- どのくらいのストローク(「旅行」)が必要ですか?
- 必要な動きの速度?
- アクチュエータ 移動速度と力の定格は反比例します。アプリケーションに応じて、必要な速度と必要な力を選択する必要がある場合があります。
- どのくらいの頻度で動作する必要がありますか?
- 5分でデューティサイクルを計算します 継続的な使用(で モーション);ほとんどの産業的アプリケーションでは、デューティサイクルを考慮する必要はありません。
- その他の条件?
- 衝突保護、緩和速度、可変速度制御などの機能は、追加のコンポーネントに含めることができます。
- 他の機能は、リレー、制御スキーム、およびクリエイティブ配線で行われる場合があります。
上記のすべての基準が理解されたら、コンポーネントからシステムを構築する準備が整います。基本的なアクチュエータシステムには、これらの部分が必要です。
- アクチュエータ & 取り付けブラケット - ブラケットはアクチュエータ固有です。適切なブラケットについては、製品ページを参照してください
- コントロール (スイッチ または リモート または plc)
- システムの制御部分が責任を負います 極性の切り替え を制御するモーター回路の アクチュエータの動きの方向.
- ほとんど 制限、条件、および要件 自動化されたシステムが制御スキームに関与しています。
- 外部システムとのインターフェース さまざまなレベルの合併症でコントロールコンポーネントを使用して実行できます。
- 電源 - (アクチュエーターの累積アンペアの描画を超える)
- 可能な限り簡単なシステムは次のとおりです CSPS配線電源および制御システム、プラス 1つ アクチュエータ(5Aドロー付き)。

次に、あなたを決定する時です 最も重要な要件。ほとんどのプロジェクトは、次のカテゴリのいずれかに適合していることがわかります。垂直リフティング/低下、水平スライドモーション、ヒンジの作動、または精密ベースのプロジェクト(例、その上、 スチュワートプラットフォーム、または科学的試験装置)。この記事では、精度に対処しません。精密アプリケーションを設計している場合は、 Arduino-Controlled Actuatorチュートリアル
垂直リフティングと水平スライドアプリケーションは計画が最も簡単です - すべてが並行しているため、ストロークと重量の評価を得るための追加の計算はありません - 単純な追加と減算だけです。
垂直リフト
最も多くの1つ まっすぐに アプリケーションはキッチンアプライアンスリフトまたはドロップダウンリフトです。これらのプロジェクトは、ほぼオールインアクチュエータキットを作成したほど十分に一般的です!キッチンアプライアンスリフトはそうです のみ 望遠鏡鋼フレームからの大幅なサポートを備えた垂直線に移動できます。
最も多くの1つ 広く使われています アクチュエータ用の垂直リフティングアプリケーションは、キャンピングカーバンベッドリフトです。この操作は直接的な垂直運動であり、通常は2〜4のアクチュエーターに広がり、偶数同期された動きを要求します。
上記のプロジェクトは両方とも同じ原則を使用しており、以下の例と同じように。アクチュエーターは、まっすぐでシンプルな垂直方向の動きで、何かを邪魔にならないように動かしています。唯一の 機能的 プロジェクト間の違いは、移動オブジェクトに対するアクチュエータの位置です - ほとんどのベッドリフトにはアクチュエータがあります その下 オブジェクト;ほとんどのキッチンアプライアンスリフトは下にあります そして後ろ、そして他の人もそうかもしれません 上または隣接する 移動オブジェクト。いくつかの特定のアプリケーションでは、プーリーを使用できます。どちらもいない限り アクチュエータ または 移動オブジェクト 妨害され、取り付けられた接続がしっかりしているため、操作は機能します。
この例では、私たちは持っているふりをします 20インチのパススルーウィンドウ それは引っ張らなければなりません 上 そして、使用するための邪魔にならない。窓はフレームを含む25ポンドです。窓は軌道に乗っています。私たちは持っている必要があります もっと 25ポンドのプッシュ/プル、および少なくとも20インチのストロークアクチュエータを超えています。

この操作のアクチュエータは、いずれかの方向に垂直にマウントできます。上の写真には、1つのユニットにロッドがあります 上 そして1つ 下。赤い点は、動きに必要な括弧またはアタッチメントを表します。この操作は2つを使用できます 同期 窓の動きを確保し、さらには均等に取り付けたアクチュエーター。この操作は可能です また 窓の上にある単一のアクチュエータによって、中央から引っ張られます - 窓は十分にバランスをとる必要があります ない 操作中にバインドします。これが懸念事項である場合は、レールスライド、引き出しスライド、またはその他の線形ガイドを使用して、非結合運動を確保することをお勧めします。
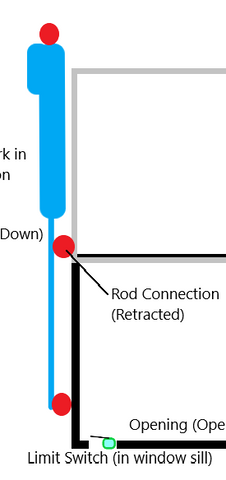
次に、実際の動き。この窓の高さは20インチです。を使って プレミアム線形アクチュエータ この例。執筆時点では、18インチのストロークオプションと24インチのストロークオプションがあります。どちらを選択する必要がありますか?アクチュエータのストロークはです 動きの最大量 ユニットから取得できます。あなたはできる いつも 外部制限スイッチでさらにモーションを制限します。 20インチの例では、18インチ アクチュエータ ウィンドウの2インチを残します 開口部の内側。 24インチのユニットは、長い間、私たちが必要とする20インチに制限することができます。 余分な 考慮。窓が閉じた後、アクチュエーターがデッドドライブをしたくありません。これにより、窓、誰かの指、アクチュエータ、または上記のすべてが傷つく可能性があります。外部制限スイッチを使用して、目的のモーションが完了したときに操作を停止することをお勧めします。 ここをクリック インストールと配線の詳細については 外部制限スイッチ。
サンプルプロジェクトでは、外部制限スイッチを使用してアクチュエータを停止する必要があります 閉まっている または 下げられました 位置。このために、ウィンドウの格納された(アップ)位置を 完全に格納されました アクチュエータの位置。これはを使用します リトラクションサイド 動きを制限するアクチュエーターの内部制限スイッチ 上向き、 また、外部制限スイッチは、ウィンドウが敷居と接触するとすぐに拡張機能を停止します(下げます)。
私たちは取るべきです 水平 ウィンドウの寸法が考慮されます 配線、 しかし、それは操作に影響を与えません。
水平スライド
水平方向のスライド操作は、垂直操作とほぼ同じ方法で計算できますが、負荷要件は変更されます。一般的な水平操作には、スライドアウトの引き出しまたは階段、サイドモービングの隠されたテレビ、または拡張プラットフォーム(展開可能なソーラーパネルなど)が含まれます。

水平方向の動きを自動化するとき、最初のステップは、自動化するモーションを作成することです。ほとんどのプロジェクトは、このために引き出しスライドまたはレールスライドを使用しています。このアプリケーションでは、スライドはです 実は 荷重重量を支えるので、右の線形ガイドまたはスライドを選択することが最重要です。最初に線形スライドコンポーネントをインストールし、手でアプリケーションを押してモーションが機能することを確認する必要があります(可能であれば)。

私たちはすでに、このアプリケーションのアクチュエータがそうであることを確立しました ない オブジェクトの全重量を押します。代わりに、アクチュエータは克服するだけで済む必要があります 摩擦 線形ガイドでは、使用したものに応じて、この値は非常に低くなる可能性があります。オブジェクトを自分で移動することから近似力の推定を取得できない場合は、移動オブジェクトの重量に基づいてスライドの累積摩擦/トルクを計算できます。その後、アクチュエータがその値を超えていることを確認します。最後のオプションは、そのアクチュエーターを選択することです できた 垂直に持ち上げます オブジェクトは、オブジェクトを水平スライドモーションを介して移動することを保証します。
ヒンジ付きフラップまたはふた
3番目の一般的なプロジェクトタイプは、ヒンジ付きアプリケーションです。実際にはあります 電卓 これを支援するために - しかし この記事はそうではありません 線形アクチュエータ計算機の使用方法に対応します. (LACチュートリアルの記事については、ここをクリックしてください).

ヒンジ付きアプリケーションには、ゼロから行われた場合、いくつかの三角法と単純な物理計算が必要です。いつものように、最初のステップは、動きを定義し、移動するオブジェクトがヒンジの周りに効果的に明確になるようにすることです。

理想的なアプリケーションにより、アクチュエーターは動くオブジェクトを動きの経路に沿って押し込むことができます。このオブジェクトの動きの経路は、直線ではなくアークです。これは、アクチュエータの攻撃角度が 変更されます 操作中 - これは、 瞬間的な必要な力 操作によっても変更されます。これらの状況では、移動オブジェクト(蓋またはフラップ)に対するアクチュエータの角度が非常に重要です。取り付け位置は、この角度と力に影響します。あなたはそれを認識したかもしれません このアプリケーション もっている 3つの変数 すべてが変化し、他の人の価値に影響します。これらの変数は、アクチュエータストロークの長さ、ヒンジジョイントに対するオブジェクトマウント位置、および必要なアクチュエータの力です。 に集中することをお勧めします 最初に距離とストローク、次に計算します 体重要件 それぞれの位置のために。

フラップ/オブジェクトが「閉じ」、アクチュエータが撤回される場合、取り付けポイントは格納されたアクチュエータの穴から穴までの長さでなければならず、フラップ/オブジェクトが「開く」場合、これらの取り付けポイントは 拡張されたアクチュエータの長さ 別として - 長すぎるストロークは正しい長さに制限される場合がありますが、短すぎるストロークはオブジェクトを完全に動かしません。前述の計算機はです 設計 これらの推定を支援するため。 そのチュートリアルについては、ここをクリックしてください。

取り付けポイントがある場合 ヒンジに近い、操作にはaが必要です より高い力、より短いストロークアクチュエーター。 取り付けポイントがヒンジから遠くにある場合、あなたは 下の力 aでアクチュエータ より長いストローク長。ヒンジされたプロジェクトには、ほとんどあります 常に範囲 機能的なアクチュエータの可能性の可能性、そしてあなたが決定するのはあなた次第です どちらのオプション プロジェクトに最適にフィットします。
展開時に三角形を作る平面上で2つのポイントを定義していることに気付いたかもしれません。これは、ストロークの長さをゼロから計算するために使用できる三角法です。この推論も定義する場合があります 2つの可能な取り付けポイント、この状況では、どちらの場所も機能しますが、常に持っています 異なる負荷値。これがどのように見えるかの例は以下です。
取り付け位置1: この操作にはaがあります 負荷重量が低い、取り付け位置がそうであるように 垂直に近い オブジェクトが水平位置にあるとき、それは ほとんどの負荷 アクチュエータについて。このデザインでは、機械的な利点が高くなります.

取り付け位置2: このレイアウトにはaが必要です より高い力のアクチュエータ;これは、アクチュエータが角をつけているためです に向かって ヒンジ。これには、より多くの力が必要です 動き始めます オブジェクト。




