Um novo projeto de automação pode ser assustador; nós sabemos. Com todos os termos técnicos, fiação elétrica, interfaces de controle de computador e outros recursos, pode ser difícil saber ondecomeçar! Quando a incerteza impede o progresso do seu projeto, voltar ao básico e revisar os requisitos do projeto pode mostrar um caminho a seguir. Gosto de dizer que conhecimento é poder, masentendimento é moeda.
Ao iniciar um novo projeto de automação ou ao reajustar e substituir um atuador linear em um projeto existente, essas perguntas ajudarão você a determinar qual(is) atuador(es) funcionará(m) em seu projeto.
- Qual é a aplicação?
- Você está colocando um atuador em um projeto ou produto existente?
- Você está projetando um novo projeto do zero?
- Qual é a carga da unidade ou quanta força você precisa?*
- As classificações de peso do atuador são para apenas cargas axiais. Para aplicações não lineares (como dobradiças), pode ser necessário calcular a carga axial.
- De quanto curso ('viagem') você precisa?
- Velocidade de movimento necessária?
- Atuador do velocidade de movimento e classificação de força estão inversamente relacionadas. Pode ser necessário escolher entre a velocidade desejada ou a força desejada, dependendo da aplicação.
- Com que frequência você precisa que ele funcione?
- Calculamos ciclos de trabalho em 5 minutos de uso contínuo (em movimento); a maioria das aplicações não industriais não precisa considerar os ciclos de trabalho.
- Outras condições?
- Recursos como proteção contra colisão, velocidades reduzidas ou controle de velocidade variável podem ser incluídos com componentes adicionais.
- Outras funções às vezes podem ser realizadas com relés, esquemas de controle e fiação criativa.
Depois que todos os critérios acima forem compreendidos, você estará pronto para construir seu sistema a partir de componentes. Um sistema de atuador básico requer estas peças:
- Atuador(es) & Suportes de montagem - Os suportes são específicos do atuador. Consulte as páginas do produto para colchetes adequados
- Controles (Trocar ou Controlo remoto ou CLP)
- A parte de controle do sistema é responsável por trocando a polaridade do circuito do motor, que controla o direção do movimento do atuador.
- Maioria restrições, condições e requisitos para um sistema automatizado estão envolvidos no esquema de controle.
- Interface com sistemas externos pode ser feito com componentes de controle em vários níveis de complicações.
- Fonte de energia - (Exceda o consumo de amperagem cumulativa de seus atuadores)
- O sistema mais fácil possível é o Sistema de controle e alimentação com fio CSPS, mais um atuador (com consumo de 5A).

Em seguida, é hora de determinar seu requisitos mais importantes. Descobrimos que a maioria dos projetos se enquadra em uma das seguintes categorias: Elevação/Abaixamento Vertical, Movimento Deslizante Horizontal, Atuações Articuladas ou um projeto baseado em precisão (Exemplo,acima, uma plataforma Stewart ou equipamento de teste científico). Não abordaremos a precisão neste artigo; se você estiver projetando uma aplicação de precisão, recomendamos começar com nosso Tutoriais sobre atuadores controlados por Arduino
As aplicações de levantamento vertical e deslizamento horizontal são as mais simples de planejar - tudo é paralelo, portanto não há cálculos extras para obter suas classificações de curso e peso - apenas simples adição e subtração.
Elevadores Verticais
Um dos mais direto aplicações é um elevador de eletrodomésticos de cozinha ou elevador suspenso - esses projetos são comuns o suficiente para que fizemos um kit de atuador quase completo para eles! Os elevadores de eletrodomésticos são apenas capaz de se mover em linha vertical, com suporte substancial da estrutura telescópica de aço.
Um dos mais amplamente utilizado aplicações de elevação vertical para nossos atuadores é o Camper Van Bed Lift. Esta operação é um movimento vertical direto, geralmente distribuído por 2 a 4 atuadores e com a necessidade de movimento uniforme e sincronizado.
Ambos os projetos acima usam o mesmo princípio, assim como o exemplo abaixo. O atuador move algo para dentro ou para fora do caminho, em um movimento reto, simples e vertical. A única funcional as diferenças entre os projetos são a posição do atuador em relação ao objeto em movimento - a maioria dos elevadores de cama possui atuadores debaixo de o objeto; a maioria dos elevadores de eletrodomésticos estarão embaixo e atrás, e outros podem até ser acima ou adjacente a o objeto em movimento. Em algumas aplicações específicas, uma polia pode ser usada. Enquanto nem o atuador do nem o objeto em movimento estiver obstruída e as conexões montadas estiverem sólidas, a operação funcionará.
Para este exemplo, vamos fingir que temos um Janela de passagem de 20” que deve ser puxado acima e fora do caminho para uso. A janela pesa 25 libras, incluindo a moldura. A janela está nos trilhos. Precisamos ter mais mais de 25 libras de empurrar/puxar e pelo menos um(s) atuador(es) de curso de 20”.

O(s) atuador(es) nesta operação podem ser montados verticalmente em qualquer orientação. Na foto acima, uma unidade tem a haste acima e um abaixo. Os pontos vermelhos representam os suportes ou acessórios necessários para o movimento. Esta operação poderia usar dois sincronizado atuadores, montados paralelamente, para garantir o movimento uniforme da janela. Esta operação poderia também ser feito por um único atuador, acima da janela, puxando do centro - a janela precisaria ser equilibrada o suficiente para não vincular durante a operação. Se isso for uma preocupação, recomendamos o uso de uma corrediça de trilho, corrediça de gaveta ou outra guia linear para garantir um movimento não vinculativo.
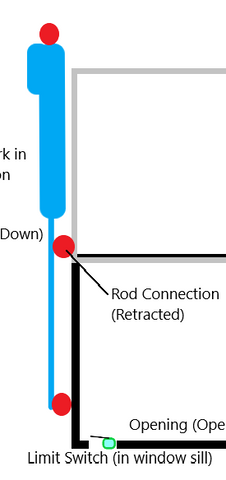
A seguir, o movimento real. Esta janela tem 20 ”de altura. Usando um Atuador Linear Premium para este exemplo; no momento em que este artigo foi escrito, temos uma opção de curso de 18” e uma opção de curso de 24” - qual devemos escolher? O curso do atuador é o quantidade máxima de movimento você pode obter na unidade. Você pode sempre restrinja ainda mais o movimento com interruptores de limite externos. Para nosso exemplo de 20”, um de 18” atuador do deixaria 2” da janela dentro da abertura. Uma unidade de 24”, embora mais longa, pode ser limitada aos 20” que necessitamos, sem muita extra consideração. Não queremos que os atuadores fiquem mortos depois que a janela for fechada, pois isso pode machucar a janela, os dedos de alguém, o atuador ou todos os itens acima. Recomendamos o uso de uma chave fim de curso externa para interromper a operação quando o movimento desejado for concluído. Clique aqui para obter mais informações sobre instalação e fiação Chaves de limite externas.
No projeto de exemplo, devemos usar uma chave fim de curso externa para parar o atuador no fechado ou abaixado posição. Para isso, alinharíamos a posição Retraída (para cima) da janela com o totalmente retraído posição do atuador; Isso usa o lado de retração interruptor de limite interno do atuador para restringir o movimento para cima, e o interruptor de limite externo irá parar a extensão (abaixamento) assim que a janela entrar em contato com o peitoril.
Deveríamos levar o horizontal dimensão da janela em consideração para fiação, mas não terá efeito na operação.
Slides horizontais
Uma operação horizontal deslizante pode ser calculada da mesma forma que uma operação vertical, mas os requisitos de carga mudarão. As operações horizontais comuns incluem gavetas ou escadas deslizantes, TVs ocultas que se movem lateralmente ou plataformas extensíveis (como painéis solares implantáveis).

Ao automatizar um movimento horizontal, o primeiro passo é criar o movimento a ser automatizado. A maioria dos projetos usa uma corrediça de gaveta ou corrediça de trilho para isso. Nesta aplicação, o slide é na verdade suportando o peso da carga, portanto, escolher a guia linear ou corrediça correta é fundamental. Você desejará instalar primeiro os componentes do slide linear e garantir que o movimento funcione empurrando o aplicativo com a mão (se possível).

Já estabelecemos que o atuador nesta aplicação não não empurre todo o peso do objeto. Em vez disso, o atuador só precisa superar o atrito nas guias lineares - dependendo do que você usou, esse valor pode ser muito baixo. Se você não conseguir obter uma estimativa aproximada da força ao mover o objeto sozinho, poderá calcular o atrito/torque cumulativo de seus slides com base no peso do objeto em movimento e, em seguida, certificar-se de que o atuador exceda esse valor. A última opção é selecionar um atuador que poderia levantar verticalmente o objeto, o que garante que ele moverá o objeto através de um movimento deslizante horizontal.
Abas ou tampas articuladas
Nosso terceiro tipo de projeto comum é um aplicativo articulado. Na verdade temos um calculadora para ajudar com isso - no entanto este artigo não será abordar como usar a calculadora do atuador linear. (Clique aqui para ver o artigo do tutorial da LAC).

Um aplicativo articulado requer alguns cálculos de trigonometria e física simples, se feito do zero. Como sempre, o primeiro passo é definir o movimento e garantir que o objeto em movimento possa articular-se efetivamente em torno da dobradiça.

A aplicação ideal permite que o atuador empurre o objeto em movimento ao longo de seu caminho de movimento. A trajetória de movimento deste objeto é um arco, em vez de uma linha reta - isso significa que o ângulo de ataque do atuador vai mudar durante a operação - o que, por sua vez, significa que o força momentânea necessária também mudará durante a operação. Nestas situações, o ângulo do atuador em relação ao objeto em movimento (tampa ou aba) é muito importante. As posições de montagem afetarão este ângulo, bem como a força; você pode ter percebido isso esta aplicação tem 3 variáveis que todos mudam e afetam o valor dos outros. Essas variáveis são o comprimento do curso do atuador, a posição de montagem do objeto em relação à junta da dobradiça e a força necessária do atuador. Recomenda-se focar no distâncias e acidente vascular cerebral primeiro, então calcule o exigência de peso para essa respectiva posição.

Quando a aba/objeto estiver “fechada” e o atuador estiver retraído, os pontos de montagem deverão estar separados pelo comprimento de furo a furo do atuador retraído, e quando a aba/objeto estiver “aberto”, esses pontos de montagem deverão ser os comprimento estendido do atuador distante - Um traço muito longo pode ser limitado ao comprimento correto, mas um traço muito curto não moverá o objeto completamente. A calculadora mencionada anteriormente é projetado para ajudar com essas estimativas. Clique aqui para ver esse tutorial.

Se os pontos de montagem forem mais perto da dobradiça, a operação exigirá um maior força, atuador de curso mais curto. Se os seus pontos de montagem estiverem mais distantes da dobradiça, você poderá usar um força inferior atuador com um comprimento de curso mais longo. Para projetos articulados, há quase sempre um intervalo de possibilidades de atuadores funcionais, e cabe a você determinar qual das opções se adequará melhor ao seu projeto.
Você deve ter percebido que estamos definindo dois pontos em um plano que formam um triângulo quando implantados - esta é a trigonometria que pode ser usada para calcular o comprimento do traço a partir do zero. Este raciocínio também pode definir dois possíveis pontos de montagem, nesta situação, qualquer um dos locais funcionará, mas sempre terão valores de carga diferentes. Um exemplo de como isso se parece está abaixo.
Posição de montagem 1: Esta operação terá um menor peso da carga, pois as posições de montagem são mais perto da perpendicular quando o objeto está na posição horizontal, que é quando há o maior carga no atuador. A vantagem mecânica é maior com este design.

Posição de montagem 2: Este layout exigirá um atuador de força maior; isso ocorre porque o atuador está inclinado em direção a a dobradiça. Isso exige mais força necessária para comece a se mover o objeto.




