Dieses Projekt zeigt Ihnen, wie Sie eine Tivo -Fernbedienung und ein Arduino -Board nutzen können, um einen linearen Aktuator zu betreiben, um ein Gemälde zu heben, das einen Fernseher abdeckt. Sehen Sie sich das Video am Ende an
Werkzeuge benötigt
Die folgenden Tools sind erforderlich, um dieses Projekt abzuschließen.
- #0 Phillips Schraubendreher
- Lötkolben
- Lot
- Kabelschneider
- Kleine Zange (ich habe Zange verwendet, die für die Arbeit mit kleinen Elektronik entwickelt wurden)
Liste der Einzelteile
Die folgenden Teile sind erforderlich, um dieses Projekt abzuschließen.
- Hochleistungsstrecker Aktuator von Firgelli Automatisierung
- Tivo Roamio Fernbedienung
- Arduino uno rev 3
- Hammond 1591esbk ABS Project Box Black (7,5 ”x 4,3” x 2,2 ”)
- Mikrotivität IB171 170-Punkte-Mini-Breadboard für Arduino
- Infrarotempfänger 2,5–5,5 V 38 kHz
- 100pcs Michael Josh 20 cm M/F Pullover Kabel Kabel 1 Pin Stecker männlich zu weiblich
- Sainsmart 2-Kanal-Relaismodul
- USB 2.0-Kabel-männlich bis b-male
- 4 Fuß 18/5 schwarzer Sprinklerdraht
- 8 Qty #4–40 x 2 ”Edelstahlmaschinenschrauben (ich habe sie bei Home Depot gekauft)
- 8 Qty Everbuilt #4–40 Maschinenschraubmuttern (ich habe sie bei Home Depot gekauft)
- 16 qty ½ ”Nylon -Abstandshalter (ich habe sie bei Home Depot gekauft)
- 1 Qty Zip -Krawatte
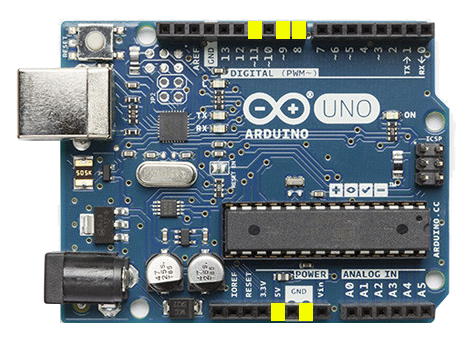
Einrichten des Arduino Uno Rev 3
Wir werden die folgenden Stifte auf dem Arduino -Board verwenden, die gelb hervorgehoben sind.
- Power 5V
- Digital #8
- Digital #9
- Digital #11
- Power GND
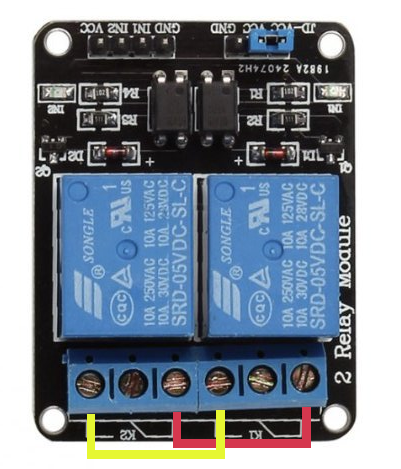
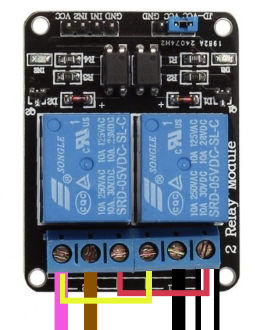
Einrichten des SainsMart 2-Kanal-Relaismoduls
Wir müssen das Sainsmart -Relaismodul verjagen, um mit dem zusammenfallen Firgelli Automationen Linearer Aktuator. Es gibt einen blauen Jumper von JD-VCC bis VCC. Lassen Sie dies als IS an Ort und Stelle.
Jumper K1 Position 1 zu K2 Position 1
Legen Sie einen Jumper -Draht von der ersten Position auf der K1 -Relais auf die erste Position auf der K2 -Relais. Unser Jumper wird rot gezeigt.

Jumper K1 Position 3 zu K2 Position 3
Platzieren Sie einen Jumper -Draht aus der dritten Position auf der K1 -Relais auf die dritte Position im K2 -Relais. Unser Jumper wird gelb gezeigt.

Wenn Sie richtig springen, sollten Sie die folgende Konfiguration sehen.
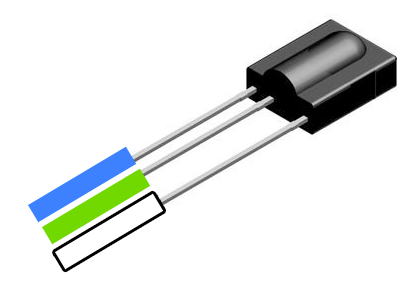
Einrichten des Infrarotsensors
Der Infrarotsensor hat drei Drähte, die sich daraus ergeben. Einer ist für einen Erdungsdraht, einer ist für einen 5 -V -Stromkabel und der dritte das Signal an unser Arduino -Board aus.
Streifen Sie zwei Zentimeter des äußeren Schildes am 18-5 Sprinklerdraht zurück, um die farbigen Drähte im Inneren freizulegen. Wir werden nur die grünen, weißen und blauen Drähte verwenden, also schneiden Sie die anderen ab, damit wir uns nicht mit ihnen anlegen müssen.
Strip ⅛ ⅛ ⅛ ”der Isolierung an jedem der Drähte, die wir verwenden werden. Diese werden mit der folgenden Konfiguration an das Relais gelötet. Wenn Sie sich den Sensor von oben mit der runden Beule ansehen:
- Löten Sie den blauen Draht am linken Terminal.
- Löten Sie den grünen Draht am mittleren Klemmen.
- Löten Sie den weißen Draht am rechten Terminal.
Einrichten des Kabelbaums des linearen Aktuators
Der lineare Aktuator wird mit einer kabelgebundenen Fernbedienung mit zwei Dreiecksknöpfen geliefert. Eine Taste aktiviert einen Schalter, der den linearen Aktuator nach oben bewegt, und die andere bewegt ihn nach unten.
Entfernen Sie die Leiterplatten -Fernbedienungsbehörde
Das erste ist, die Drähte in der Rückseite der Fernbedienung zu entstreichen. Diese müssen mit einem Phillips -Schraubendreher #0 entfernt werden.
Entfernen Sie die Leiterplatte aus der Fernbedienungsbehörde und untersuchen Sie die Drähte. Wenn man es von unten ansieht, sollte es vier Drähte an das Brett lötet. Von links nach rechts sind sie schwarz, weiß, lila und braun, wie unten gezeigt.
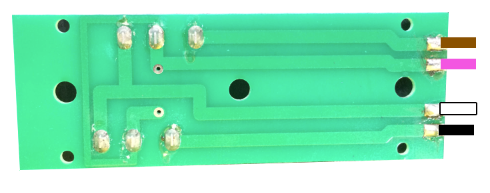
Wenn sie aus irgendeinem Grund unterschiedliche Farben verwendeten, verfolgen Sie einfach die Farben in derselben Reihenfolge wie unten.
Die Drähte entlöst
Entfernen Sie mit einem Lötkolben die Drähte von der Leiterplatte. Drücken Sie die Spitze des Lötkolbens vorsichtig auf den vorhandenen Lötmittel am Lötpunkt, um sie zu lösen, und ziehen Sie den Draht vorsichtig vom Lötpunkt aus.
Befestigen Sie die Drähte an den Relais
Wir werden nun die Drähte von der Kabelbedienung der Fernbedienung an das 2-Kanal-Relais von Sainsmart anbringen. Verwenden Sie den Schraubendreher #0, um das Klemme abzuschrauben, und ziehen Sie ihn dann wieder nach unten an, um den Draht zu sichern.
- Der weiße Draht geht in die K1 -Position 1
- Der schwarze Draht geht in die K1 -Position 2 ein
- Der braune Draht geht in die K2 -Position 2 ein
- Der lila Draht geht in die K2 -Position 3 ein
HINWEIS: Entfernen Sie die vorhandenen Pulloverdrähte nicht. Lassen Sie sie ein, wenn Sie die Klemmen einschrauben.
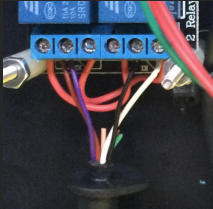
Wenn es getan wird, sollte es wie die oben genannten Bilder aussehen.
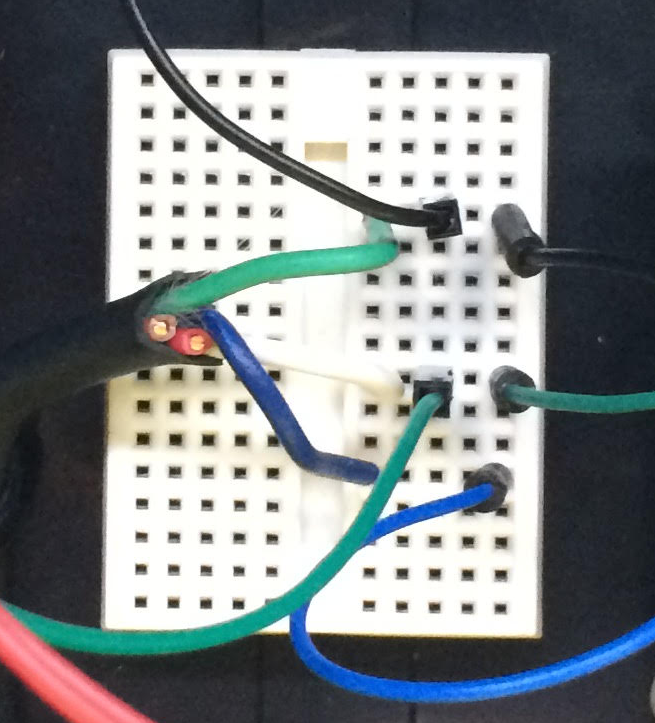
Verkabelung des Brotbretts
Wir werden jetzt das Arduino -Board an das Brotbord verdrehen. Mit dem Breadboard können wir Anschlüsse versprägen, in denen mehrere Verbindungen an einem Terminal auf dem Arduino oder am Relais hergestellt werden.
Jede Reihe von Löchern ist miteinander verbunden, sodass wir alles in dieser Reihe jumperieren können. Hier sind die Gegenstände, die wir anziehen müssen.
5 V Kraft
- Verwenden Sie einen männlichen Jumper-Draht vom 5-V-Terminal am Arduino zu einer ungenutzten Reihe auf dem Brotbrett. Schieben Sie es in ein Loch in der Reihe.
- Verwenden Sie einen männlichen Jumper-Draht aus derselben Reihe auf dem Brot bis zum VCC-Terminal des Sainsmart 2-Kanal-Relais. Schieben Sie es in ein Loch in derselben Reihe.
- Freien ¼ ”des weißen Drahtes von der anderen Seite des 18–5 Sprinklerdrahtes aussetzen. Schieben Sie es in ein Loch in derselben Reihe.
Boden
- Verwenden Sie einen männlichen Jumper-Draht vom Power GND-Terminal am Arduino zu einer unbenutzten Reihe auf dem Brotbrett. Schieben Sie es in ein Loch in der Reihe.
- Verwenden Sie einen männlichen Jumper-Draht vom GND-Anschluss am 2-Kanal-Relais von Sainsmart zu einem Loch in derselben Reihe wie dem anderen GND-Draht. Schieben Sie es in das Loch in derselben Reihe.
- Entdecken Sie ¼ ”des grünen Drahtes von der anderen Seite des 18–5 Sprinklerdrahtes. Schieben Sie es in ein Loch in derselben Reihe.
Signalisierung
- Verwenden Sie einen männlichen Jumper-Draht vom digitalen #11-Terminal am Arduino zu einer ungenutzten Reihe auf dem Brotbrett. Schieben Sie es in ein Loch in der Reihe.
- Enthüllen Sie ¼ ”des blauen Drahtes von der anderen Seite des 18–5 Sprinklerdrahtes. Schieben Sie es in ein Loch in derselben Reihe.
Wenn das Breadboard gemacht wird, sollte das folgende Bild aussehen.
Installieren Sie das Steuerungsprogramm auf dem Arduino
Sie müssen die herunterladen und installieren Arduino ide. Sobald Sie die IDE heruntergeladen und installiert haben, öffnen Sie die IDE.
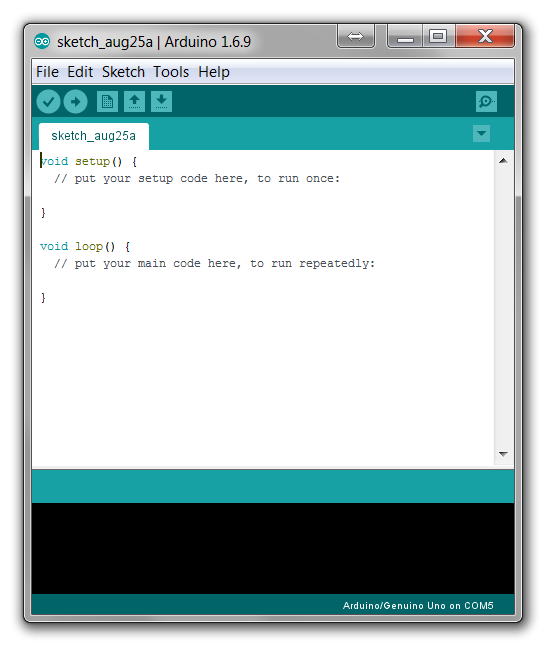
Kopieren und fügen Sie den Code in die IDE ein und fügen Sie sie ein
Laden oder kopieren Sie den Quellcode von Github und fügen Sie es in das Fenster der IDE ein, das so aussehen sollte, wenn er fertig ist.
Passen Sie die Datei istremote.cpp an
In den C: \ Programmdateien (x86) \ Arduino \ Bibliotheken \ Robotirremote \ src \ Verzeichnis befindet sich eine Datei, in der ein Quellcode -Problem enthält, das den GitHub -Quellcode zum Kompilieren verhindert. Öffnen Sie die Datei istremotetools.cpp in einem einfachen Texteditor wie Notepad und ändern Sie die folgende Zeile:
Zeile 5 sollte aussehen wie:
int recv_pin = tkd2; // Der PIN Der IR -Empfänger ist an verbunden mit
Ändern Sie es in Folgendes und speichern Sie die Datei.
int recv_pin = 11; // Der PIN Der IR -Empfänger ist an verbunden mit
Schließen Sie den Arduino mit dem USB -Kabel an Ihren Computer an
Legen Sie die Arduino-, Brot- und Relaisbretter auf eine nicht leitende Oberfläche wie einen Holzschreibtisch.
Schließen Sie die Rechteckseite des USB -Kabels an Ihren Computer und die „D“ -Seite an das Arduino -Board an.
Wählen Sie den Port
Wählen Sie das Menüelement der Tools - Port -Menüpunkte aus und wählen Sie das aus, das Ihre Arduino -Karte anzeigt.
Laden Sie den Code hoch
Wählen Sie das Menüelement "Skizze" hoch, um den Code in den Arduino hochzuladen.
Testen Sie den Code
Nachdem der Code hochgeladen hat, stecken Sie den Kabelbaum von der Firgelli Automatisierte linearer Aktuator zurück in den Aktuator und stecken Sie den Aktuator an.
Halten Sie die Arduino -Karte über das USB -Kabel an Ihren Computer angeschlossen.
Zeigen Sie Ihre TIVO -Fernbedienung auf den Infrarotsensor und klicken Sie auf die Schaltfläche "Green Daumen". Der Aktuator sollte nach oben gehen.
Zeigen Sie Ihre TIVO -Fernbedienung auf den Infrarotsensor und klicken Sie auf die Schaltfläche „Abneigerung“ der roten Daumen. Der Aktuator sollte sich nach unten bewegen.
Boxe alles ein
Ich habe die Hammond -Projektbox zusammen mit den Maschinenschrauben, Abstandshaltern und Maschinenschraubenmuttern verwendet, um meine Leiterplatten zu unterbringen. Ich benutzte eine Punktspitze am Löteisen, um Löcher durch die schwarze Plastikbox zu stechen und Platz für die Drähte durch die Seiten zu schaffen. Ich benutzte das Reißverschluss, um den Draht für den Infrarotsensor davon abzuhalten, herausgezogen zu werden. Die Kontrolldrähte auf der Firgelli Automationen Linearer Aktuator Lassen Sie ein Stück Kautschuk ausgelegt, um zu verhindern, dass sie herausgezogen werden, damit ich es nutzen konnte.
Über den Autor
Richard Bagdonas ist ein Datenintegrationsexperte mit über 15 Jahren Erfahrung in der Integration in den Verkaufspunkt, elektronischer Gesundheitsakten, Kundenbeziehungsmanagement und Lagermanagementsysteme. Richard hat seit seinem Kind an Elektronik gebastelt und dies ist sein erstes Arduino -Projekt.
Richard ist derzeit Chef -Gesundheitsarchitekt bei MI7, wo er die Integration des Unternehmens in elektronische Gesundheitsaktenversuche überwacht.



