Nachdem Sie auf völlig einzigartige und wundervolle Weise mit den LEDs fertig sind, möchten Sie tatsächlich mit der physischen Umgebung interagieren. Hier kommen lineare Aktuatoren ins Spiel. Wenn Sie etwas bewegen möchten, etwas öffnen, etwas drehen, ist ein linearer Aktuator höchstwahrscheinlich der beste Weg, dies zu tun. Und warum das Heben, Bewegen, sich selbst drehen, wenn Sie einen linearen Aktuator dazu bringen können, die harte Arbeit zu erledigen.
Natürlich können Sie eine Taste auf eine Fernbedienung oder einen Wippschalter drücken, aber warum nicht einen Bewegungssensor oder sogar eine Echtzeituhr für zeitbasierte Ereignisse haben?
Wenn Sie gerade erst in Arduino einsteigen, wissen Sie möglicherweise nicht, dass Sie einen großen Motor nicht einfach mit den Stiften des Bretts verbinden und ihn bewegen können. Sie müssen einen Schaltmechanismus verwenden, um die hohe Stromlast zu tragen. Sie können einen Motorfahrer oder eine H-Brücke verwenden, aber der einfachste und schnellste Weg besteht darin, ein paar Staffeln oder ein Staffelbrett zu verwenden. Sie haben zwei Optionen, wenn Sie einen Arduino mit einem linearen Aktuator verwenden. Sie können einfach die Relaisplatine verwenden, um die Leistung zu steuern, die dem Aktuator ohne Positionsinformationen übergeht. Wenn Sie einen der FA-PO-Feedback-Aktuatoren verwenden, können Sie die Wellenposition bestimmen und eine Position für geschlossene Schleife erstellen. In diesem Artikel konzentrieren wir uns auf die einfachere Option, nur die Relais, um den Aktuator zu steuern, und keine Positionsinformationen.
Stellen Sie sicher, dass Sie Relais (oder eine Relaisplatte) mit SPDT -Relais verwenden. SPDT -Relais (einzelne Pole -Doppel -Wurf) haben drei Verbindungen für jedes Relais. Häufig, normalerweise offen, normalerweise geschlossen. Wir werden in einem anderen Artikel näher auf Relais eingehen. Stellen Sie einfach sicher, dass Sie SPDT -Relais erhalten, sonst funktioniert es nicht. Sie benötigen zwei SPDT -Relais, um den Aktuator zu steuern. Mit zwei SPDT -Relais können Sie die Richtung des Aktuators starten, anhalten und ändern.
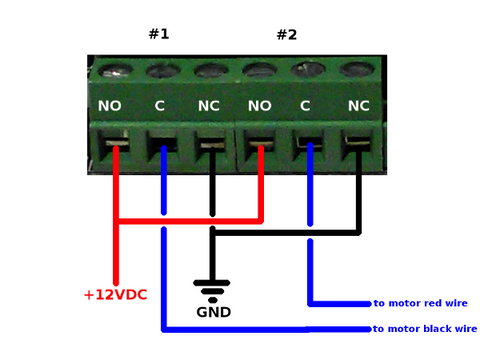
Wie Sie im unten stehenden Schaltplan sehen können, verbinden Sie Ihren 12VDC -Boden mit dem normalerweise geschlossenen Terminal der beiden Relais und verbinden Ihre +12VDC mit dem normalerweise offenen Terminal der beiden Relais. Sie können entweder eine Kreuzung machen, um jeden Kabel in zwei Teile zu teilen oder einen kurzen Jumper -Draht zu verwenden. Sie verbinden die beiden Aktuatordrähte an das gemeinsame Terminal, eine mit jedem Relais.
Nehmen wir für den Arduino -Code an, dass digitale Pins 2 und 3 die beiden Relais steuern. Sie müssen überprüfen, was es auf Ihrem Board ist. Hier ist ein einfacher Code -Snippet, der zeigt, wie Sie den linearen Aktuator erweitern, zurückziehen und stoppen können.
const int RELAY_1_A = 2; const int RELAY_1_B = 3; void setup() { pinMode(RELAY_1_A, OUTPUT);int Aktuator) {pinMode(RELAY_1_B, OUTPUT);} Leere loop() { //This is where your program logic goes //You can call the functions to control the //actuator here, as well as reading sensors, etc.. } Leere Extendactuator (int Aktuator) {// Setzen Sie ein Relay einen und das andere aus // Dies wird den Aktuator verlängern Digitalwrite(Relay_1_a, HOCH); Digitalwrite(Relay_1_B, NIEDRIG); } Leere retractactuator (
// Stellen Sie ein Relais und das andere auf
// Dadurch wird der Stellantrieb zurückgezogen
Digitalwrite(Relay_1_a, NIEDRIG);
Digitalwrite(Relay_1_B, HOCH);
}
Leere Stopactuator (int Aktuator) {
// beide Relais ausschalten
// Dies hält den Aktuator im Bremsen auf
Digitalwrite(Relay_1_a, NIEDRIG);
Digitalwrite(Relay_1_B, NIEDRIG); }
Dadurch sollten Sie mit einem Arduino (oder einem anderen Mikrocontroller) mit Relais die Verwendung von A übernommen werden, um a zu steuern Firgelli Automationen Linearer Aktuator.
Wenn Sie nach einem linearen Aktuator suchen, rufen Sie uns an oder senden Sie uns eine E -Mail in unserer technischen Zeile. Wenn Sie nach einem soliden Arbeitspferd -Aktuator suchen, sehen Sie sich das an die lineare Aktuatoren der Light Duty Series Wir tragen oder die Leichte Einheiten mit Potentiometer -Feedback. Vergessen Sie nicht, dass ein gutes 12VDC -Netzteil induktive Lasten umgehen kann. MB1 Klammern für lineare Aktuatoren (MB1 für die FA-150-Serie) spart Ihnen viel Zeit und Frustration.



