Yeni bir otomasyon projesi göz korkutucu olabilir; biliyoruz. Tüm teknik terimler, elektrik kabloları, bilgisayar kontrol arayüzleri ve diğer çan ve ıslıklarla birlikte, nereye gideceğinizi bile bilmek zor olabilir.başlangıç! Belirsizlik projenizin ilerlemesini engelliyorsa, temellere geri dönmek ve projenizin gereksinimlerini gözden geçirmek size ileriye yönelik bir rota gösterebilir. Bilginin güç olduğunu söylemeyi seviyorum amaanlayış para birimidir.
Yeni bir otomasyon projesine başlarken veya bir lineer aktüatörü mevcut bir projeye yeniden takarken ve değiştirirken bu sorular, projeniz için hangi aktüatörlerin çalışacağını belirlemenize yardımcı olacaktır.
- Uygulama nedir?
- Mevcut bir tasarıma veya ürüne aktüatör mü koyuyorsunuz?
- Sıfırdan yeni bir proje mi tasarlıyorsunuz?
- Ünite üzerindeki Yük nedir veya ne kadar güce ihtiyacınız var?*
- Aktüatör ağırlık değerleri aşağıdakiler içindir: yalnızca eksenel yükler. Doğrusal olmayan uygulamalar için (menteşeler gibi) eksenel yükü hesaplamanız gerekebilir.
- Ne kadar vuruşa ('seyahat') ihtiyacınız var?
- Gerekli hareket hızı?
- Aktüatör hareket hızı ve kuvvet oranı ters orantılıdır. Uygulamaya bağlı olarak istediğiniz hız veya istediğiniz kuvvet arasında seçim yapmanız gerekebilir.
- Çalıştırmak için ne sıklıkla ihtiyacınız var?
- Görev döngülerini 5 dakikada hesaplıyoruz sürekli kullanım (içinde hareket); Endüstriyel olmayan uygulamaların çoğunun görev döngülerini dikkate almasına gerek yoktur.
- Diğer durumlar?
- Çarpışma koruması, azaltılmış hızlar veya değişken hız kontrolü gibi özellikler ek bileşenlere dahil edilebilir.
- Diğer işlevler bazen röleler, kontrol şemaları ve yaratıcı kablolamayla gerçekleştirilebilir.
Yukarıdaki kriterlerin tümü anlaşıldıktan sonra sisteminizi bileşenlerden oluşturmaya hazırsınız demektir. Temel bir aktüatör sistemi şu parçaları gerektirir:
- Aktüatör(ler) & Montaj Braketleri - Braketler aktüatöre özeldir. Uygun braketler için ürün sayfalarına bakın
- Kontroller (Anahtar veya Uzak veya PLC'ler)
- Sistemin Kontrol kısmı şunlardan sorumludur: polariteyi değiştirmek kontrol eden motor devresinin aktüatör hareketinin yönü.
- En kısıtlamalar, koşullar ve gereksinimler Otomatik bir sistem için kontrol şemasına dahil edilirler.
- Harici sistemlerle arayüz oluşturma değişen komplikasyon seviyelerinde kontrol bileşenleriyle yapılabilir.
- Güç kaynağı - (Aktüatörlerinizin Kümülatif Amper Çekişini Aşın)
- Mümkün olan en kolay sistem CSPS Kablolu Güç ve Kontrol Sistemi, artı bir aktüatör (5A çekişli).

Sonra, sıranızı belirlemenin zamanı geldi en önemli gereksinimler. Çoğu projenin aşağıdaki kategorilerden birine uyduğunu görüyoruz: Dikey Kaldırma/İndirme, Yatay Kayma Hareketi, Menteşeli Hareketler veya hassasiyete dayalı bir proje (Örnek,üstünde, Stewart Platformu veya bilimsel test ekipmanı). Bu yazıda kesinliğe değinmeyeceğiz; Hassas bir uygulama tasarlıyorsanız, aşağıdaki adımlarla başlamanızı öneririz: Arduino Kontrollü Aktüatör Eğitimleri
Dikey Kaldırma ve Yatay Kaydırma uygulamaları planlamak için en basit uygulamalardır; her şey paraleldir, dolayısıyla vuruş ve ağırlık derecelerinizi almak için ekstra hesaplamalara gerek yoktur; yalnızca basit toplama ve çıkarma işlemleri yapılır.
Dikey Asansörler
En iyilerinden biri basit Uygulamalar arasında Mutfak Aletleri Kaldırma veya Düşürme Kaldırma yer alıyor - bu projeler o kadar yaygın ki, bunun için neredeyse hepsi bir arada bir aktüatör kiti hazırladık! Mutfak Aletleri Asansörleri sadece Teleskopik çelik çerçevenin sağladığı önemli destek sayesinde dikey bir çizgide hareket etme kabiliyetine sahiptir.
En iyilerinden biri yaygın olarak kullanılan Aktüatörlerimiz için dikey kaldırma uygulamaları Karavan Van Yatak Asansörüdür. Bu işlem, genellikle 2-4 aktüatöre yayılan ve eşit, senkronize hareket gerektiren doğrudan dikey bir harekettir.
Yukarıdaki projelerin her ikisi de aşağıdaki örnekte olduğu gibi aynı prensibi kullanır. Aktüatör, düz, basit, dikey bir hareketle bir şeyi yolun içine veya dışına doğru hareket ettiriyor. Tek fonksiyonel projeler arasındaki farklar, aktüatörün hareketli nesneye göre konumudur; çoğu Yatak Asansöründe aktüatörler bulunur altında nesne; Çoğu Mutfak Aletleri Asansörü altta olacaktır ve arkasındave diğerleri bile olabilir üstünde veya bitişiğinde hareketli nesne. Bazı özel uygulamalarda makara kullanılabilir. İkisi de olmadığı sürece aktüatör ne de hareketli nesne tıkalıysa ve monte edilen bağlantılar sağlamsa işlem çalışacaktır.
Bu örnekte, elimizde bir tane varmış gibi davranacağız. 20” Geçiş penceresi bu çekilmeli yukarı ve kullanımdan uzak. Pencere, çerçeve dahil 25 pounddur. Pencere raylar üzerindedir. E sahip olmamız gerek Daha 25 pound'dan fazla itme/çekme ve en az 20 inç stroklu aktüatör(ler).

Bu işlemdeki aktüatör(ler) her iki yönde de dikey olarak monte edilebilir. Yukarıdaki fotoğrafta bir ünitede çubuk var yukarı ve bir aşağı. Kırmızı noktalar, hareket için gereken braketleri veya ekleri temsil eder. Bu işlem iki tane kullanabilir senkronize Pencerenin hareketini sağlamak ve eşit bir şekilde hareket ettirmek için paralel olarak monte edilen aktüatörler. Bu operasyon olabilir Ayrıca pencerenin üzerinde, merkezden çekerek tek bir aktüatör tarafından gerçekleştirilebilir; pencerenin yeterince iyi dengelenmesi gerekir. Olumsuz çalışma sırasında bağlayın. Bu bir sorunsa, bağlayıcı olmayan bir hareket sağlamak için Raylı Kızak, Çekmeceli Kızak veya başka bir doğrusal kılavuz kullanmanızı öneririz.
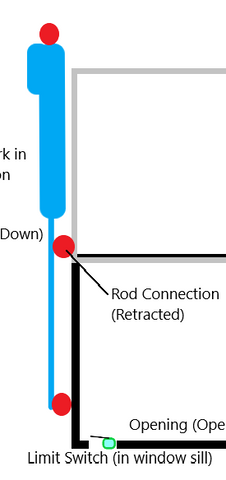
Sonra, gerçek hareket. Bu pencere 20 inç uzunluğundadır. Bir kullanarak Premium Lineer Aktüatör bu örnek için; Bu yazının yazıldığı sırada 18" vuruş seçeneğimiz ve 24" vuruş seçeneğimiz var; hangisini seçmeliyiz? Aktüatörün stroku maksimum hareket miktarı birimden alabilirsiniz. Yapabilirsiniz Her zaman Harici Limit Anahtarları ile hareketi daha da kısıtlayın. 20" örneğimiz için 18" aktüatör pencerenin 2 inçlik kısmını bırakırdım açıklığın içinde. 24 inçlik bir ünite, daha uzun olsa da, çok fazla gerek kalmadan ihtiyacımız olan 20 inç ile sınırlandırılabilir ekstra düşünce. Pencere kapatıldıktan sonra aktüatörlerin tam hareket etmesini istemiyoruz çünkü bu, pencereye, birisinin parmaklarına, aktüatöre veya yukarıdakilerin tümüne zarar verebilir. İstenilen hareket tamamlandığında işlemi durdurmak için Harici Limit Anahtarı kullanmanızı öneririz. Buraya tıklayın kurulum ve kablolama hakkında daha fazla bilgi için Harici Limit Anahtarları.
Örnek projede aktüatörü durdurmak için Harici Limit Switch kullanmalıyız. kapalı veya indirilmiş konum. Bunun için pencerenin Geri Çekilmiş (Yukarı) konumunu, tamamen geri çekilmiş aktüatörün konumu; Bu şunu kullanır: geri çekilme tarafı Hareketi kısıtlamak için aktüatörün dahili limit anahtarı yukarı, ve Dış Limit Anahtarı, pencere eşikle temas ettiği anda uzatmayı (indirmeyi) durduracaktır.
almalıyız yatay pencerenin boyutu dikkate alınır kablolama, ancak operasyona hiçbir etkisi olmayacaktır.
Yatay Slaytlar
Yatay Kayma Operasyonu, dikey operasyonla hemen hemen aynı şekilde hesaplanabilir ancak yük gereksinimleri değişecektir. Yaygın Yatay İşlemler arasında kaydırılarak açılan çekmeceler veya merdivenler, yana doğru hareket eden gizli TV'ler veya genişleyen platformlar (yerleştirilebilir güneş panelleri gibi) yer alır.

Yatay bir hareketi otomatikleştirirken ilk adım, otomatikleştirilecek hareketi oluşturmaktır. Çoğu proje bunun için Çekmece Slaytı veya Ray Slaytını kullanır. Bu uygulamada slayt Aslında yükün ağırlığını taşıyor, bu nedenle Sağ Doğrusal Kılavuzu veya Kızağı seçmek çok önemlidir. Öncelikle lineer kızak bileşenlerini monte edip (mümkünse) uygulamayı elinizle iterek hareketin çalışmasını sağlamak isteyeceksiniz.

Bu uygulamadaki aktüatörün bunu yaptığını zaten belirledik. Olumsuz nesnenin tüm ağırlığını itin. Bunun yerine, aktüatörün yalnızca bu zorluğun üstesinden gelmesi gerekir. sürtünme doğrusal kılavuzlarda - ne kullandığınıza bağlı olarak bu değer çok düşük olabilir. Nesneyi kendiniz hareket ettirerek yaklaşık bir kuvvet tahmini elde edemiyorsanız, hareketli nesnenin ağırlığına göre kızaklarınızın kümülatif sürtünmesini/torkunu hesaplayabilir ve ardından aktüatörün bu değeri aştığından emin olabilirsiniz. Son seçenek, aşağıdakileri sağlayan bir aktüatör seçmektir: abilir dikey olarak kaldırma Nesneyi yatay bir kayma hareketi ile hareket ettireceğini garanti eden nesne.
Menteşeli Kanatlar veya Kapaklar
Üçüncü ortak proje tipimiz ise menteşeli uygulamadır. Aslında bir hesap makinesi bu konuda yardımcı olmak için - ancak bu makale olmayacak Doğrusal Aktüatör Hesaplayıcısının nasıl kullanılacağını öğrenin. (LAC eğitim makalesi için burayı tıklayın).

Menteşeli bir uygulama, eğer sıfırdan yapılırsa, bazı trigonometri ve basit fizik hesaplamaları gerektirir. Her zaman olduğu gibi ilk adım, hareketi tanımlamak ve hareketli nesnenin menteşe çevresinde etkili bir şekilde eklemlenmesini sağlamaktır.

İdeal uygulama, aktüatörün hareketli nesneyi hareket yolu boyunca itmesine olanak tanır. Bu nesnenin hareket yolu düz bir çizgi yerine yay şeklindedir; bu, aktüatörün saldırı açısının aynı olduğu anlamına gelir. değişecek operasyon sırasında - bu da şu anlama gelir: anlık gerekli kuvvet operasyonla da değişecek. Bu durumlarda aktüatörün hareketli nesneye (kapak veya kanat) göre açısı çok önemlidir. Montaj konumları kuvvetin yanı sıra bu açıyı da etkileyecektir; bunu fark etmiş olabilirsin bu başvuru sahip olmak 3 değişken bunların hepsi değişir ve diğerlerinin değerini etkiler. Bu değişkenler Aktüatör Strok Uzunluğu, Menteşe bağlantısına göre Nesne Montaj Konumu ve gerekli aktüatör kuvvetidir. Şuna odaklanmanız önerilir: önce mesafeler ve vuruş, ardından hesaplayın ağırlık gereksinimi söz konusu pozisyon için.

Kanat/nesne 'kapalı' olduğunda ve aktüatör geri çekildiğinde, montaj noktaları Geri Çekilmiş Aktüatörün Delikten Deliğe Uzunluğu kadar olmalıdır ve kanat/nesne 'açık' olduğunda bu montaj noktaları uzatılmış aktüatör uzunluğu ayrık - Çok uzun bir vuruş doğru uzunlukla sınırlandırılabilir, ancak çok kısa bir vuruş nesneyi tam olarak hareket ettirmez. Daha önce bahsedilen hesap makinesi tasarlanmış Bu tahminlere yardımcı olmak için. Bu eğitim için buraya tıklayın.

Montaj Noktaları menteşeye daha yakın, operasyon bir gerektirecektir daha yüksek kuvvet, daha kısa stroklu aktüatör. Montaj noktalarınız menteşeden daha uzaktaysa, daha düşük kuvvet aktüatör ile daha uzun strok uzunluğu. Menteşeli projeler için neredeyse her zaman bir aralık fonksiyonel aktüatör olasılıklarının hangisi olduğunu belirlemek size kalmıştır. seçeneklerden hangisi projenize en iyi şekilde uyacaktır.
Bir düzlem üzerinde konuşlandırıldığında üçgen oluşturan iki nokta tanımladığımızı fark etmiş olabilirsiniz; bu, vuruş uzunluğunu sıfırdan hesaplamak için kullanılabilecek trigonometridir. Bu mantık aynı zamanda tanımlayabilir iki olası montaj noktası, bu durumda her iki konum da işe yarayacaktır ancak her zaman farklı yük değerleri. Bunun neye benzediğine dair bir örnek aşağıdadır.
Montaj Konumu 1: Bu operasyonun bir daha düşük yük ağırlığımontaj konumları olduğundan dikeye daha yakın nesne yatay konumda olduğunda, yani en fazla yük aktüatör üzerinde. Bu tasarımla Mekanik Avantaj daha yüksektir.

Montaj Konumu 2: Bu düzen bir gerektirecektir daha yüksek kuvvet aktüatörü; bunun nedeni aktüatörün açılı olmasıdır karşı menteşe. Bu, daha fazla güce ihtiyaç duyulmasını gerektirir hareket etmeye başla nesne.




