전위차계
가변 저항 인 전위차계는 선형 액추에이터에 사용되어 저항이 어떻게 변화하는지에 대한 위치 피드백베이스를 제공합니다. 전위차계를 사용하여 피드백을 사용하는 선형 액추에이터 피드백로드 선형 액추에이터, 입력 전압의 경우 와이어 1, 와이어 2는 다음과 같은 3 개의 추가 와이어로 구성됩니다. 변하기 쉬운 저항 및 와이어 3은지면을위한 것입니다. 와이어 2, 출력 및 접지 사이의 전압을 측정하여 전위차계의 출력을 읽을 수 있으며, 이는 선형 액추에이터의 절대 위치를 표시 할 수 있습니다. 이 피드백을 사용하려면 어떤 유형의 마이크로 컨트롤러를 사용해야합니다. Arduino액추에이터가 움직일 때이 위치 값을 읽습니다.

전위차계의 위치 피드백
선형 액추에이터가 움직일 때 전위차계의 가변 저항이 변함에 따라 와이어 2와 접지 사이의 전압 차이가 변할 것입니다. 이 때문에 Arduino와 같은 컨트롤러의 소프트웨어에서 피드백을 쉽게 처리 할 수 있습니다. 이는 와이어 2의 출력 전압을 접지와 비교할 수 있습니다. Arduino를 사용하면 마이크로 컨트롤러의 핀에서 아날로그를 사용하고 Analogread () 함수를 사용하여 와이어 2의 전압을 읽으면 간단히 수행 할 수 있습니다. 전위차계 피드백을 사용하여 Arduino를 선형 액추에이터에 연결하는 방법에 대한 예가 표시됩니다. 아래에.

핀의 아날로그 Arduino ADC (Analog-to-Digital Converters)는 와이어 2의 아날로그 전압을 0에서 1023 사이의 10 비트 ADC 값으로 변환합니다. 10 비트 ADC 값은 변환기가 아날로그 신호를 다음으로 변환한다는 것을 의미합니다. 2^10 또는 1024의 0에서 1023까지의 별개의 값은 모든 마이크로 컨트롤러가 10 비트 ADC, 일부는 8 비트 또는 16 비트이며, 비트 수가 클수록 ADC의 해상도가 커집니다. 아날로그 신호를 디지털 값으로 변환 한 후에는 스트로크 길이 측면에서 위치 값을 인치와 같이 결정하면 특정 선형 액추에이터의 정확한 아날로그 범위를 찾아야합니다. 1023. 이것은 액추에이터 내부의 기어 박스로 인해 전위차계가 한계까지 완전히 회전하지 않기 때문에이 범위를 수동으로 결정해야합니다. 아래 코딩 예제에 대해 4 인치 스트로크 길이 피드백로드 선형 액추에이터 아날로그 값은 0”에서 44이고 아날로그 값은 951에서 4”입니다. 이 값을 사용하면 비율을 사용하여 다음과 같은 뇌졸중 길이 값을 결정할 수 있습니다.

아래 코딩 예에서와 같이 뇌졸중 길이 = 0.00441*(아날로그 값 - 44)로 단순화 할 수 있습니다. 마이크로 컨트롤러 코드 에서이 아날로그 값을 얼마나 자주 읽는지는 또 다른 중요한 고려 사항입니다. 아래 코드 예제에서 Arduino는 전위차계를 읽고 액추에이터가 이동하는 한 위치 값을 업데이트합니다. 그러나 내부 타이머를 사용하여 정해진 시간 간격으로 위치 값을 업데이트하거나 코드의 기본 루프 내부에 전위차계 읽기 기능을 배치하고 위치 값을 지속적으로 업데이트 할 수 있습니다. 컨트롤러를 사용하여 여러 개별 기능을 수행하려는 경우 후자는 권장되지 않습니다.
https://gist.github.com/OMikeGray/4dec9e075a8fe41efaea001fa1e98d70
전기 소음 처리
전위차계에서 피드백의 한 가지 단점 중 하나는 전기 노이즈의 영향을받을 수 있으며 위치 값을 불안정하게 만들 수 있다는 것입니다. 이를 극복하는 한 가지 방법은 디지털 필터를 사용하여 전기 노이즈를 제거하고 안정적인 결과를 얻는 것입니다. 지수 필터에서 자체 이점이있는 고역 통과 및 대역 통과 필터에 이르기까지 사용할 수있는 다양한 유형의 필터는 거의 없지만 선형 액추에이터가있는 많은 응용 분야에서는 위치 값의 실행 평균을 사용하면 작동합니다. 실행 평균은 단순히 입력 신호를 부드럽게하기 위해 마지막 x 측정량의 평균입니다. 평균화하려는 정확한 측정 수는 응용 프로그램에 따라 다르며 가장 잘 작동하는 것을 결정하기 위해이 숫자를 사용해야 할 수도 있습니다. 평균에 측정이 너무 적다면 신호가 여전히 시끄럽지 만, 측정이 너무 많으면 액추에이터의 실제 위치보다 훨씬 뒤떨어져 있습니다. 필터를 효과적으로 만들 수있는 너무 적은 측정과 너무 많은 측정 값 사이의 균형을 찾고 있습니다. 아래는 실행 평균 필터와 실제 입력 신호의 효과를 보여주는 플롯입니다.
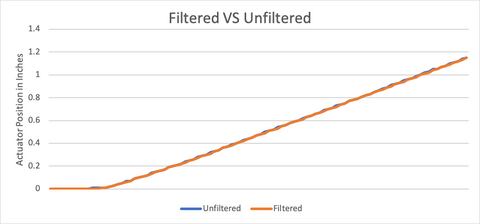
실행 평균을 구현하는 데 사용되는 코드는 아래에 나와 있으며 평균 3 개의 측정을 사용하여 입력 신호를 부드럽게합니다. 실제 입력 신호에는 노이즈가 많지 않았기 때문에 세 가지 측정이 선택되었으므로 값을 부드럽게하기 위해 몇 가지 측정 만 필요했습니다. 입력 신호에 더 많은 노이즈가 있으면 더 많은 수의 측정이 필요합니다. 많은 유도 성분 (예 : 모터)이있는 상황에서 전기 노이즈는 훨씬 더 큰 문제가 될 것입니다.
https://gist.github.com/OMikeGray/b13f156c080a100a89e5bbd541d0565e
자동화에 대한 피드백 사용
디자인에 피드백을 구현하는 데있어 가장 큰 장점은 주어진 입력의 위치를 알고있는 자체 상기 시스템을 만들 수 있다는 것입니다. 자동화 된 시스템에서 전위차계 피드백을 활용하려면 선형 액추에이터의 욕구가 전위차계가 제공하는 실제 위치와 비교할 수 있습니다. 그런 다음 액추에이터에게 그에 따라 확장 또는 후퇴하도록 지시하면됩니다. 자동화 된 시스템에서 전위차계 피드백을 사용하면 극복해야 할 몇 가지 문제가 있습니다. 하나는 위에서 논의 된 전기 소음 문제이며, 다른 하나는 반복 가능한 결과를 얻을 수 있습니다. 전위차계는 일반적으로 다른 피드백 옵션에 비해 선형 액추에이터의 작은 움직임에 민감하지 않기 때문에 정확한 반복적 인 결과를 달성하기가 더 어려워집니다. 실제로 이것은 원하는 위치에 오류가 발생하여 주어진 응용 프로그램에 허용 될 수 있음을 의미합니다. 매우 정확한 위치가 필요하지 않거나 수동 스위치를 마이크로 컨트롤러로 교체하여 시스템을 자동화하는 경우 전위차계의 위치 피드백이 충분히 정확합니다. 선형 액추에이터에서 정확한 포지셔닝이 필요한 경우 고려해야 할 수도 있습니다. 다른 피드백 옵션 선형 액추에이터의 경우 또는 추가 구성 요소를 추가하여보다 안정적인 결과를 제공합니다. 이러한 구성 요소에는 센서가 포함됩니다 외부 한계 스위치 절대적인 위치의 더 나은 지표를 줄 수 있습니다.

여러 선형 액추에이터를 제어 할 때 반복 가능한 결과를 얻을 수 없다는 것도 문제가됩니다. 전위차계의 출력 신호가 다른 액추에이터의 전기 노이즈를 포함하여 전기 노이즈에 의해 쉽게 영향을 받기 때문에, 전위차계에 대한 입력 전압에 의존하여 여러 선형 액추에이터가 동시에 움직일 수 있도록 도전 할 수 있습니다. 디지털 필터를 사용하여 전위차계에 안정적인 입력 전압을 보장하고 다른 유도 성분에서 출력 신호 와이어를 실행하는 것이 모두 반복 가능한 결과를 보장하는 데 도움이됩니다. 여러 액추에이터를 동시에 실행하려면 다른 피드백 옵션 선형 액추에이터 용.



