Potensiometer
Potensiometer, yang merupakan resistor variabel, digunakan dalam aktuator linier untuk memberikan basis umpan balik posisi tentang bagaimana resistensi mereka berubah. Aktuator linier yang menggunakan potensiometer untuk umpan balik, seperti kami Umpan Balik Rod Linear Actuator, akan terdiri dari 3 kabel tambahan seperti yang ditunjukkan di bawah ini, kawat 1 untuk tegangan input, kawat 2 adalah variabel resistor, dan kawat 3 adalah untuk tanah. Anda dapat membaca output potensiometer dengan mengukur tegangan antara kawat 2, output, dan tanah, yang akan memberikan indikasi posisi absolut aktuator linier. Untuk memanfaatkan umpan balik ini, Anda harus memanfaatkan beberapa jenis mikrokontroler, seperti Arduino, untuk membaca nilai posisi ini saat aktuator bergerak.

Umpan balik posisi dari potensiometer
Ketika resistor variabel dari potensiometer berubah seiring bergerak aktuator linier, perbedaan tegangan antara kawat 2 dan tanah akan berubah. Karena itu, umpan balik dapat dengan mudah ditangani dalam perangkat lunak pengontrol, seperti Arduino, karena Anda dapat dengan mudah membandingkan tegangan output kawat 2 dengan ground. Menggunakan Arduino, ini hanya dapat dilakukan dengan menggunakan analog dalam pin mikrokontroler dan menggunakan fungsi analogread () untuk membaca tegangan dari kawat 2. Contoh cara menghubungkan Arduino ke aktuator linier dengan umpan balik potensiometer ditampilkan ditampilkan di bawah.

Analog dalam pin Arduino adalah konverter analog-ke-digital (ADC), yang akan mengonversi tegangan analog pada kawat 2 menjadi nilai ADC 10-bit yang akan antara 0 hingga 1023. nilai ADC 10-bit berarti konverter akan menerjemahkan sinyal analog menjadi 2^10 atau 1024 Nilai berbeda mulai dari 0 hingga 1023. Tidak semua mikrokontroler adalah 10-bit ADC, beberapa adalah 8-bit atau 16-bit, dan semakin besar jumlah bit semakin besar resolusi ADC. Setelah Anda mengubah sinyal analog menjadi nilai digital, untuk menentukan nilai posisi dalam hal panjang stroke, seperti dalam inci, Anda harus menemukan kisaran analog yang tepat dari aktuator linier khusus Anda karena mungkin tidak berkisar dari 0 hingga 1023. Ini karena gearbox di dalam aktuator mencegah potensiometer sepenuhnya berputar ke batasnya dan berarti Anda harus menentukan rentang ini secara manual. Untuk contoh pengkodean di bawah ini, Umpan Balik Panjang 4 ”Aktuator linear batang memiliki nilai analog 44 pada 0 ”dan nilai analog 951 pada 4”. Menggunakan nilai -nilai ini, Anda dapat menggunakan rasio untuk menentukan nilai panjang stroke seperti di bawah ini:

Ini dapat disederhanakan menjadi panjang stroke = 0,00441*(nilai analog - 44), seperti pada contoh pengkodean di bawah ini. Seberapa sering Anda membaca nilai analog ini dalam kode mikrokontroler Anda adalah pertimbangan penting lainnya. Dalam contoh kode di bawah ini, Arduino membaca potensiometer dan memperbarui nilai posisi selama aktuator bergerak. Tetapi Anda juga dapat menggunakan timer internal untuk memperbarui nilai posisi selama interval waktu yang ditetapkan atau Anda dapat dengan mudah menempatkan fungsi baca potensiometer di dalam loop utama kode dan terus memperbarui nilai posisi. Meskipun yang terakhir tidak disarankan jika Anda berencana menggunakan pengontrol Anda untuk melakukan beberapa fungsi individu.
https://gist.github.com/OMikeGray/4dec9e075a8fe41efaea001fa1e98d70
Berurusan dengan kebisingan listrik
Salah satu kelemahan umpan balik dari potensiometer adalah dapat dipengaruhi oleh kebisingan listrik dan dapat membuat nilai posisi Anda tidak stabil. Salah satu cara untuk mengatasi ini adalah dengan menggunakan filter digital untuk menghilangkan kebisingan listrik dan mencapai hasil yang stabil. Ada beberapa jenis filter yang dapat digunakan dari filter eksponensial ke filter high-pass dan band-pass masing-masing dengan manfaatnya sendiri, tetapi untuk banyak aplikasi dengan aktuator linier, cukup menggunakan rata-rata berjalan dari nilai posisi akan berfungsi. Rata -rata berjalan hanyalah rata -rata dari jumlah x terakhir dari pengukuran untuk menghaluskan sinyal input. Jumlah pasti pengukuran yang ingin Anda rata -rata akan tergantung pada aplikasi Anda dan Anda mungkin perlu bermain -main dengan nomor ini untuk menentukan apa yang paling berhasil. Beberapa hal yang harus diperhatikan, jika Anda memiliki terlalu sedikit pengukuran dalam rata -rata Anda, sinyal Anda akan tetap berisik, tetapi jika Anda memiliki terlalu banyak pengukuran, hasil Anda akan ketinggalan terlalu jauh di belakang posisi aktuator yang bisa digunakan. Ini menemukan keseimbangan antara terlalu sedikit dan terlalu banyak pengukuran yang akan membuat filter Anda efektif. Di bawah ini adalah plot yang menunjukkan efek filter rata -rata berjalan versus sinyal input aktual.
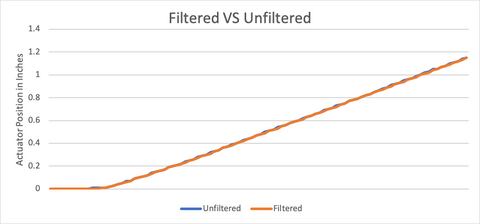
Kode yang digunakan untuk mengimplementasikan rata -rata berjalan ditunjukkan di bawah ini, menggunakan rata -rata 3 pengukuran untuk menghaluskan sinyal input. Tiga pengukuran dipilih karena tidak ada banyak noise dalam sinyal input aktual, sehingga hanya beberapa pengukuran yang diperlukan untuk menghaluskan nilainya. Jika ada lebih banyak noise dalam sinyal input, sejumlah besar pengukuran akan diperlukan. Dalam situasi di mana ada banyak komponen induktif (mis. Motor) kebisingan listrik akan menjadi masalah yang jauh lebih besar.
https://gist.github.com/OMikeGray/b13f156c080a100a89e5bbd541d0565e
Memanfaatkan umpan balik untuk otomatisasi
Hal yang hebat tentang menerapkan umpan balik ke dalam desain Anda adalah memungkinkan Anda untuk membuat sistem otomatis yang tahu di mana harus menjadi input yang diberikan. Untuk memanfaatkan umpan balik potensiometer dalam sistem otomatis, Anda dapat dengan mudah membandingkan keinginan Anda yang panjang dari aktuator linier Anda dengan posisi aktual yang diberikan oleh potensiometer. Maka Anda hanya perlu memberi tahu aktuator Anda untuk memperpanjang atau menarik kembali. Meskipun menggunakan umpan balik potensiometer dalam sistem otomatis memang memiliki beberapa masalah yang mungkin perlu Anda atasi. Salah satunya adalah masalah kebisingan listrik, yang dibahas di atas, yang lain mampu mencapai hasil yang dapat diulang. Karena potensiometer umumnya tidak sensitif terhadap gerakan aktuator linier yang lebih kecil, dibandingkan dengan opsi umpan balik lainnya, ini membuat mencapai hasil yang tepat yang tepat menjadi lebih sulit. Dalam praktiknya, ini berarti Anda akan memiliki margin kesalahan di sekitar posisi yang Anda inginkan, yang mungkin dapat diterima untuk aplikasi yang diberikan. Jika Anda tidak memerlukan penentuan posisi yang sangat tepat atau mengganti sakelar manual dengan mikrokontroler untuk mengotomatiskan sistem Anda, umpan balik posisi dari potensiometer akan cukup akurat untuk Anda. Jika Anda memang membutuhkan posisi yang akurat dari aktuator linier Anda, maka Anda mungkin perlu dipertimbangkan opsi umpan balik lainnya untuk aktuator linier Anda atau tambahkan komponen tambahan untuk memberikan hasil yang lebih dapat diandalkan. Komponen -komponen ini termasuk sensor atau sakelar batas eksternal yang mungkin memberi Anda indikator posisi absolut yang lebih baik.

Tidak dapat mencapai hasil yang berulang juga merupakan masalah ketika Anda mengendalikan beberapa aktuator linier. Karena sinyal output potensiometer mudah dipengaruhi oleh kebisingan listrik, termasuk kebisingan listrik dari aktuator lain, dan tergantung pada tegangan input ke potensiometer, memastikan beberapa aktuator linier bergerak secara bersamaan dapat menantang. Memanfaatkan filter digital, menjamin tegangan input yang stabil ke potensiometer, dan memiliki kabel sinyal output yang melarikan diri dari komponen induktif lainnya semuanya akan membantu memastikan hasil yang lebih berulang. Meskipun, jika Anda ingin menjalankan beberapa aktuator secara bersamaan, mungkin lebih baik untuk memeriksa opsi umpan balik lainnya untuk aktuator linier.



