Choosing the wrong aperture or focal length when precision matters — whether in a machine vision rig, cinema production, or scientific imaging setup — means objects fall outside the acceptable focus range and the shot or inspection fails. Use this Depth of Field Interactive Calculator to calculate near and far focus limits, total DoF, and hyperfocal distance using focal length, aperture (f-number), subject distance, and sensor width. Getting these numbers right is critical in industrial inspection, cinematography, and optical instrument design. This page includes the governing equations, a worked portrait system example, a simple example, and a full FAQ.
What is Depth of Field?
Depth of field is the range of distances in front of a camera where subjects appear acceptably sharp. Objects inside this range look in focus; objects outside it look blurred.
Simple Explanation
Think of depth of field like a slice of sharpness floating in front of your lens — only things inside that slice look crisp. A wide aperture (like f/1.8) makes that slice thin, so only your subject is sharp. A narrow aperture (like f/11) makes it thick, so more of the scene is in focus. The distance to your subject and your lens's focal length shift where that slice sits and how thick it gets.
📐 Browse all 1000+ Interactive Calculators
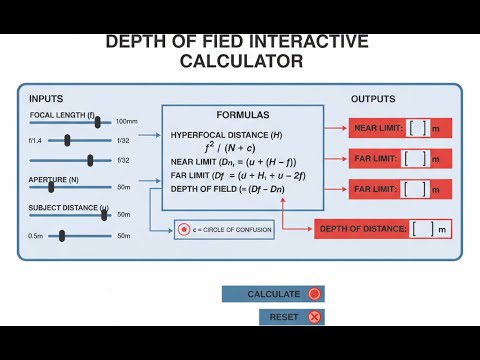
System Diagram

Depth of Field Interactive Calculator
How to Use This Calculator
- Select your calculation mode — choose whether you want to find depth of field, hyperfocal distance, circle of confusion, required aperture, subject distance, or focal length.
- Enter your lens and camera parameters — focal length (mm), aperture (f-number), subject distance (m), and sensor width (mm). The hint text shows common sensor sizes.
- Enter a target DoF value (m) if your selected mode requires one — this applies to the aperture, distance, and focal length modes.
- Click Calculate to see your result.
Simple Example
Mode: Calculate Depth of Field
Focal length: 50 mm | Aperture: f/2.8 | Subject distance: 3 m | Sensor width: 36 mm (full-frame)
Result: Near limit ≈ 2.77 m | Far limit ≈ 3.26 m | Total DoF ≈ 0.49 m
Depth of Field Interactive Visualizer
Adjust focal length, aperture, and subject distance to see how they affect the depth of field zone in real-time. Watch the sharp focus range expand and contract as you change camera settings.
NEAR LIMIT
2.77m
TOTAL DOF
0.49m
FAR LIMIT
3.26m
FIRGELLI Automations — Interactive Engineering Calculators
Governing Equations
Use the formula below to calculate the circle of confusion — the maximum acceptable blur diameter on the sensor.
Circle of Confusion (CoC)
c = d / 1500
c = circle of confusion (mm)
d = sensor diagonal or width (mm)
The divisor 1500 represents approximately 1/1500 of the sensor dimension as the acceptable blur diameter
Use the formula below to calculate hyperfocal distance - the focus point that maximizes total depth of field.
Hyperfocal Distance
H = f² / (N × c) + f
H = hyperfocal distance (mm)
f = focal length (mm)
N = f-number (aperture)
c = circle of confusion (mm)
When focused at the hyperfocal distance, depth of field extends from H/2 to infinity
Use the formula below to calculate the near focus limit — the closest distance that still appears acceptably sharp.
Near Focus Limit
Dn = (s × H) / (H + s)
Dn = near focus limit (mm)
s = subject distance (mm)
H = hyperfocal distance (mm)
Objects closer than Dn will appear unacceptably blurred
Use the formula below to calculate the far focus limit — the farthest distance that still appears acceptably sharp.
Far Focus Limit
Df = (s × H) / (H - s)
Df = far focus limit (mm)
s = subject distance (mm)
H = hyperfocal distance (mm)
When s ≥ H, the far limit extends to infinity (Df = ∞)
Use the formula below to calculate total depth of field — the complete in-focus range from near to far limit.
Total Depth of Field
DoF = Df - Dn
DoF = total depth of field (mm)
Df = far focus limit (mm)
Dn = near focus limit (mm)
The range within which objects appear acceptably sharp in the final image
Theory & Engineering Applications
Depth of field represents one of the most fundamental concepts in optical engineering, defining the distance range over which objects appear acceptably sharp when imaged through a lens system. Unlike the idealized thin lens equation that predicts a single focal plane, real optical systems produce a gradual transition from sharp to blurred as objects move away from the exact focus distance. The boundaries of acceptable sharpness are defined by the circle of confusion — a critical parameter that depends on sensor characteristics, viewing conditions, and human visual perception limits.
The Physics of Defocus and Circle of Confusion
When a point source is imaged by a lens, the geometrical optics predict that light converges to a perfect point at the focal plane. However, at distances other than the exact focus position, the converging cone of light intersects the sensor plane as a circular disk rather than a point. The diameter of this blur circle grows linearly with the distance from the focused plane. The circle of confusion criterion establishes the maximum acceptable blur diameter — typically 1/1500 of the sensor width for photographic applications, though this value varies significantly based on final image size, viewing distance, and required resolution.
The conventional CoC formula (c = sensor_width / 1500) originates from film-era photography standards where an 8×10 inch print viewed at 10 inches would not reveal blur in circles smaller than about 0.2mm at the viewing distance. For a 35mm full-frame sensor (36mm width), this yields c ≈ 0.024mm. However, modern high-resolution sensors and digital viewing at 100% magnification often require stricter criteria — some engineers use divisors of 2000 or even 2500 for critical applications like machine vision inspection systems.
Hyperfocal Distance and Optimization Strategies
The hyperfocal distance represents a critical optimization point in optical system design. When a lens is focused at the hyperfocal distance H, the depth of field extends from H/2 to infinity — maximizing the total in-focus range. This property makes hyperfocal focusing essential in applications requiring maximum depth coverage, such as landscape photography, architectural documentation, and fixed-focus surveillance systems.
The hyperfocal distance H = f²/(N·c) + f reveals several non-intuitive relationships. The quadratic dependence on focal length means that doubling the focal length quadruples the hyperfocal distance, dramatically reducing depth of field for telephoto lenses. The inverse relationship with aperture number means that stopping down (increasing N) reduces the hyperfocal distance proportionally, extending depth of field. However, diffraction effects impose practical limits — beyond approximately f/16, diffraction-induced resolution loss may exceed the depth of field benefits from smaller apertures.
Asymmetric Depth Distribution
A frequently misunderstood aspect of depth of field is its asymmetric distribution around the focus plane. For subjects closer than the hyperfocal distance, depth of field extends approximately one-third in front of the focus point and two-thirds behind it. This 1:2 ratio is not exact and varies with subject distance — approaching 1:1 for extreme close-up work and becoming more asymmetric as the subject approaches the hyperfocal distance.
The mathematical basis for this asymmetry lies in the hyperbolic nature of the near and far limit equations. As subject distance s approaches the hyperfocal distance H, the denominator (H - s) in the far limit equation approaches zero, causing the far limit to extend toward infinity much faster than the near limit approaches the lens. This behavior has significant practical implications for focus stacking in macro photography and scene depth planning in cinematography.
Machine Vision and Industrial Applications
In machine vision systems, depth of field calculations must account for factors beyond traditional photography. Industrial inspection systems often require the entire target object to fall within the depth of field simultaneously while maintaining resolution sufficient to detect defects as small as 0.1mm. This creates a challenging optimization problem: achieving maximum depth of field typically requires small apertures, but small apertures reduce light throughput and may introduce diffraction that degrades resolution.
Engineers frequently employ telecentric lens designs in machine vision to address depth of field limitations. Telecentric lenses maintain constant magnification across the depth of field range, eliminating perspective errors and enabling accurate dimensional measurements of objects at varying distances within the field of view. The trade-off is reduced working distance and larger, more expensive lens assemblies. For a typical telecentric lens with 0.1× magnification imaging a 50mm field of view, the depth of field at f/8 might extend 12-15mm — adequate for most industrial parts inspection.
Cinematography and Bokeh Control
In cinematography, precise depth of field control serves as a powerful storytelling tool, directing viewer attention through selective focus. Cinema cameras with large Super35 (24.6mm width) or full-frame sensors enable shallow depth of field looks that were impossible with smaller video formats. A 50mm lens at f/1.4 focused on a subject 2 meters away produces a total depth of field of only 77mm on a full-frame sensor — creating strong subject isolation and smooth background blur (bokeh).
The aesthetic quality of out-of-focus regions depends on aperture blade count and shape. Lenses with more aperture blades (9-11 blades) produce rounder bokeh circles, while fewer blades create polygonal highlights. Spherical aberration also affects bokeh appearance — undercorrected lenses create "soap bubble" effects with bright edges around blur circles, while overcorrected designs concentrate light in the center. High-end cinema lenses are specifically designed to control these characteristics, with some manufacturers offering custom aperture blade designs for distinctive bokeh signatures.
Worked Example: Portrait Photography System Design
Consider a professional portrait photographer designing an optical system to achieve pleasing subject isolation. The requirements are: full-frame sensor (36mm width), 85mm focal length, subject distance 3.0 meters, and maximum tolerable background blur that keeps features at 5.0 meters completely out of focus while maintaining sharp focus on the subject's face (±150mm depth).
Step 1: Calculate circle of confusion
c = 36 / 1500 = 0.024 mm
Step 2: Determine required depth of field
Target DoF = 2 × 150mm = 300mm = 0.3 m
The subject's face should remain sharp across ±150mm from the focus point.
Step 3: Calculate required aperture
We need to solve for N given f = 85mm, s = 3000mm, target DoF = 300mm, c = 0.024mm.
Using the complete depth of field equation derived from near and far limits:
DoF ≈ (2 × N × c × s²) / (f² - N × c × s)
For cases where s is much larger than f, which applies here.
Rearranging for N:
300 = (2 × N × 0.024 × 3000²) / (85² - N × 0.024 × 3000)
300 × (7225 - 72N) = 432000N
2167500 - 21600N = 432000N
2167500 = 453600N
N = 4.78
The photographer should use approximately f/4.8 (practically f/4.5 or f/5.0).
Step 4: Calculate actual depth of field at f/5.0
H = (85² / (5.0 × 0.024)) + 85 = 60208 + 85 = 60293mm = 60.3m
Dn = (3000 × 60293) / (60293 + 3000) = 180879000 / 63293 = 2858mm = 2.858m
Df = (3000 × 60293) / (60293 - 3000) = 180879000 / 57293 = 3157mm = 3.157m
Total DoF = 3157 - 2858 = 299mm ≈ 0.3m ✓
Step 5: Verify background blur at 5.0m
At 5000mm distance, the blur circle diameter can be estimated:
Blur diameter = (|5000 - 3000| / 3000) × (f / N) × aperture_factor
≈ (2000 / 3000) × (85 / 5.0) × 0.667 = 0.667 × 17 × 0.667 ≈ 7.6mm
This creates substantial background blur (7.6mm circle of confusion versus the 0.024mm acceptance criterion — approximately 316× larger), ensuring complete defocusing of background elements. The system meets both sharpness and aesthetic isolation requirements.
Practical considerations: At f/5.0, diffraction effects remain negligible (Airy disk diameter ≈ 0.0067mm, well below the CoC limit). Light throughput is adequate for outdoor portraits or studio lighting. The 299mm depth of field provides sufficient tolerance for subject movement during a photo session while maintaining facial feature sharpness across typical head depth (approximately 200-250mm from nose to ears).
This example demonstrates how depth of field calculations enable precise engineering of optical systems to meet both technical specifications and aesthetic requirements. Professional cinematographers and photographers routinely perform these calculations to select optimal focal length, aperture, and working distance combinations for specific creative and technical objectives.
For additional optical engineering calculations and resources, visit the FIRGELLI engineering calculator library.
Practical Applications
Scenario: Quality Control Engineer Optimizing Machine Vision System
Marcus, a quality control engineer at an automotive parts manufacturer, needs to configure a machine vision system to inspect crankshaft bearing journals for surface defects. The parts have a height variation of ±8mm on the inspection stage, and the system must detect scratches as small as 0.15mm across this entire range. Using the depth of field calculator, Marcus determines that his 35mm lens must operate at f/11 with a working distance of 285mm to achieve a 16.2mm depth of field that covers the part variation with adequate resolution (CoC = 0.016mm for his 8.9mm sensor). The calculation reveals that his current f/5.6 setting only provides 7.4mm DoF — explaining why defects near the top and bottom of parts were being missed during inspection.
Scenario: Wildlife Photographer Planning Safari Equipment
Elena, a professional wildlife photographer preparing for an African safari, needs to determine whether her 600mm f/4 lens will provide adequate depth of field for photographing lions at various distances. She uses the calculator with her full-frame camera (36mm sensor) to discover that at 25 meters subject distance and f/5.6, her depth of field is only 1.83 meters — barely enough to keep an adult lion's entire body sharp. For pride shots with multiple animals at varying distances, she calculates that stopping down to f/8 extends DoF to 2.58 meters, while f/11 provides 3.58 meters. This analysis helps her plan appropriate aperture settings for different scenarios and understand the trade-offs between subject isolation and group sharpness when multiple animals are positioned at different depths in the frame.
Scenario: Cinematographer Designing Rack Focus Shot
James, a director of photography working on an independent film, needs to plan a dramatic rack focus scene where the camera shifts focus from a character's face at 1.2 meters to a doorway at 8 meters in the background. Using the calculator with his cinema camera's Super35 sensor (24.6mm width) and 50mm lens at T2.1 (roughly equivalent to f/2.1), he calculates the depth of field at the near position is only 41mm — creating strong subject isolation but requiring precise focus pulling. At the far position, DoF extends to 1.87 meters, giving the focus puller more margin for error. The hyperfocal distance calculation (15.3 meters) confirms that infinity focus isn't needed for this shot. James uses these numbers to mark focus positions on the lens barrel and brief his focus puller on the critical tolerance zones, ensuring the complex shot can be executed smoothly during production.
Frequently Asked Questions
Why does depth of field extend farther behind the focus point than in front? +
How does sensor size affect depth of field and circle of confusion? +
What is the relationship between depth of field and diffraction limits? +
How accurate are depth of field calculations in practice? +
What is hyperfocal focusing and when should it be used? +
How do teleconverters and extension tubes affect depth of field? +
Free Engineering Calculators
Explore our complete library of free engineering and physics calculators.
Browse All Calculators →🔗 Explore More Free Engineering Calculators
About the Author
Robbie Dickson — Chief Engineer & Founder, FIRGELLI Automations
Robbie Dickson brings over two decades of engineering expertise to FIRGELLI Automations. With a distinguished career at Rolls-Royce, BMW, and Ford, he has deep expertise in mechanical systems, actuator technology, and precision engineering.
Need to implement these calculations?
Explore the precision-engineered motion control solutions used by top engineers.



