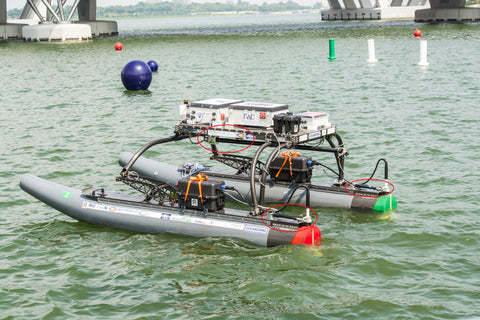
When Florida Atlantic University and Villanova University's Team WORX took first place in the static judging portion of the inaugural Maritime RobotX Challenge in 2014, they demonstrated something that naval architects and marine robotics engineers have long understood: precision electric actuation can dramatically outperform traditional marine control systems. Competing against teams from five Pacific Rim nations in Hawaii from October 16-20, Team WORX's autonomous surface vessel stood out for one key reason—they were the only team to implement an actuated thruster control system using linear actuators.
🎥 Video — Linear Actuator Equipped Vessel Outperforms
The competition, hosted by AUVSI (Association for Unmanned Vehicle Systems International) and ONR (Office of Naval Research), challenged teams to build autonomous vessels capable of navigating complex obstacle courses without human intervention. The stakes were high: only three teams from each nation were selected to compete, and the engineering solutions developed would contribute to real-world advancements in autonomous marine systems. The success of Team WORX's actuator-equipped vessel not only resulted in multiple academic publications but also established a compelling case study for how electric linear actuators can enable capabilities that traditional marine control systems simply cannot match.
Competition Objectives and Real-World Applications
The Maritime RobotX Challenge was designed to replicate authentic maritime scenarios that autonomous vessels must handle in commercial, defense, and research applications. The competition comprised five distinct objectives, each testing different aspects of autonomous navigation and control:
- Speed Gate Navigation: Traversing through two sets of color-coded buoys as quickly as possible while maintaining precise heading control
- Acoustic Pinger Detection: Locating and identifying an underwater acoustic signal source, simulating search and recovery operations
- Precision Docking: Autonomously maneuvering into one of three designated dock slips without human assistance
- Light Sequence Recognition: Detecting and responding to visual signaling patterns, representing communication protocol capabilities
- Obstacle Field Navigation: Threading through a complex buoy field that required advanced path planning and collision avoidance
These challenges mirror real-world requirements for autonomous surface vessels in harbor operations, oceanographic research, offshore energy inspection, and naval applications. The ability to accomplish these tasks required seamless integration of computer programming, electronic sensors, and mechanical platforms—a systems engineering challenge that pushed the boundaries of student innovation.
The Dual-Control Architecture Advantage
Team WORX's vessel utilized a sophisticated dual-control scheme that allowed it to optimize performance based on mission requirements. This flexibility proved critical to achieving superior results across diverse competition objectives.
Differential Thrust for High Maneuverability
The primary control mode employed differential thrust—a technique where independent control of port and starboard thrusters creates turning moments without requiring traditional rudders. This approach offers several advantages for autonomous vessels:
- Zero-radius turning capability for navigating confined spaces
- Precise heading control without forward motion
- Simplified mechanical design with fewer moving parts exposed to the marine environment
- Rapid response to course corrections detected by navigation algorithms
Station Keeping with Actuated Thrusters

The innovation that set Team WORX apart was their station-keeping controller—a system that allowed the vessel to maintain a fixed position and heading despite wind, current, and wave action, as if anchored in place. This capability was mechanically achieved through an elegant application of linear actuators.
Two 6-inch high-speed linear actuators were mounted with clamps on each thruster shaft, enabling the thrusters to pivot on a vertical axis. This vectored thrust capability provided 360-degree thrust direction control, allowing the vessel's control algorithms to continuously adjust thruster angles to counteract environmental forces. The system demonstrated remarkable precision: less than 1.5 meters of position error in both X and Y axes, and less than 2 degrees of heading error.
For the docking and acoustic detection objectives, this station-keeping ability proved invaluable. While other vessels drifted and had to constantly reposition, Team WORX's vessel could hold station with GPS precision, allowing sensors more time for data collection and analysis.
Deployable Hydrophone Array Innovation
The acoustic pinger detection challenge required teams to locate an underwater sound source—a task fundamental to submarine detection, underwater communications, and marine wildlife research. Team WORX's solution demonstrated how feedback actuators can enable adaptive mechanical systems that deploy only when needed.
Ultra-Short Baseline (USBL) Technology
The team designed a hydrophone array in an inverted T-pattern utilizing ultra-short baseline technology. USBL systems determine the location and depth of acoustic sources by measuring the time difference of signal arrival at multiple hydrophones. Team WORX's implementation achieved impressive specifications:
- Detection range: up to 2000 meters
- Angular accuracy: less than 2 degrees margin of error
- Three-dimensional positioning capability providing both bearing and depth information
Actuator-Controlled Deployment Mechanism
Rather than having the hydrophone array permanently deployed—which would increase drag and vulnerability to damage—the team engineered a deployable system using a 9-inch linear actuator. The hydrophone array was mounted to a carbon fiber boom, with the actuator arm connected to the top end through a custom-designed mount. When the vessel's navigation system determined that acoustic detection was required, the actuator extended, raising the boom and deploying the hydrophones below the surface. Once the acoustic objective was completed, the actuator retracted, pulling the boom back into a protected, low-drag position.
This deployable system offered multiple advantages:
- Reduced hydrodynamic drag during high-speed transit between objectives
- Protection of sensitive hydrophones from surface debris and collision damage
- Optimal hydrophone depth positioning for acoustic detection when deployed
- Simplified deck layout with boom stored vertically during non-use
The acoustic detection system proved to be Team WORX's highest-scoring component during the competition, directly demonstrating the value of strategic actuator implementation in marine robotics.
Why Linear Actuators Excel in Marine Applications
The success of Team WORX's vessel highlights several characteristics that make electric linear actuators particularly well-suited for marine automation applications, whether in competitive robotics or commercial vessel systems.
Precision and Repeatability
Marine applications often require exact positioning—whether for thruster angles, sensor deployment, or hatch control. Linear actuators provide precise, repeatable motion that can be easily integrated with position feedback systems. The feedback actuators used in the RoboBoat project allowed the control system to know exact actuator position at all times, enabling closed-loop control algorithms that continuously corrected for environmental disturbances.
Compact Form Factor and High Force Density
Space is always at a premium on vessels, particularly on smaller autonomous craft. Linear actuators deliver high force output in compact packages, eliminating the need for bulky hydraulic systems with pumps, reservoirs, and complex plumbing. The 6-inch actuators used for thruster control and 9-inch actuator for boom deployment fit within tight mounting envelopes while providing sufficient force to move mechanical systems against wind and wave loading.
Corrosion Resistance Considerations
While the competition occurred over a five-day period, real-world marine applications require consideration of the harsh saltwater environment. Quality marine-grade linear actuators feature corrosion-resistant materials such as stainless steel shafts, marine-grade aluminum housings, and sealed motor compartments that protect against water intrusion. For extended marine exposure, IP66 or IP68 rated actuators provide the necessary environmental protection.
Simplified Electrical Integration
Electric actuators operate on standard DC voltages (typically 12V or 24V) commonly available on vessels. This eliminates the need for hydraulic power units and allows direct integration with vessel electrical systems, battery banks, and control electronics. The control signals can be simple voltage reversals for basic applications or PWM (pulse-width modulation) signals for speed control and sophisticated positioning.
In-House Design, Build, and Testing
A significant aspect of Team WORX's achievement was that the differential thrust controller, station-keeping controller, and USBL system were all designed, built, and tested in-house at Florida Atlantic University. This comprehensive approach to systems engineering allowed the team to optimize integration between mechanical, electrical, and software components.
The iterative design process involved:
- Mechanical design and fabrication of actuator mounting brackets and thruster pivot assemblies
- Electronics integration including motor controllers, position sensors, and navigation computers
- Software development for autonomous navigation, station-keeping algorithms, and sensor fusion
- Extensive pool and open-water testing to validate performance under various conditions
- System identification and controller tuning to optimize response characteristics
This holistic engineering approach—combined with the strategic use of reliable actuation components—resulted in a vessel that could execute complex autonomous behaviors that other teams struggled to achieve.
Applications Beyond Competition Robotics
While Team WORX's vessel was designed for competition, the actuator-based systems they developed have broader implications for marine automation across multiple industries.
Commercial Marine Automation
Modern vessels increasingly employ electric actuators for deck equipment, cargo handling, and environmental control systems. Applications include:
- Automated hatch covers for cargo holds and deck access
- Adjustable trim tabs and stabilizer fins for ride optimization
- Deployable davits and crane systems
- Gangway and boarding ramp positioning
- Engine room damper and valve control
Research and Survey Vessels
Oceanographic research vessels utilize actuators for deploying and retrieving sensor packages, much like Team WORX's hydrophone array. Scientific instruments, sampling equipment, and underwater cameras all benefit from precise, controlled deployment mechanisms that protect expensive equipment when not in use.
Recreational Marine Applications
Boat owners increasingly incorporate actuators for comfort and convenience features such as automated bimini tops, sliding sunroofs, convertible seating, and swim platform extensions. The same precision and reliability required for autonomous vessels translates directly to enhanced user experience in recreational applications.
Selecting the Right Actuators for Marine Projects
When implementing linear actuators in marine environments, several selection criteria should guide your decision:
Force Requirements
Calculate the maximum load the actuator will need to move, including safety margins for wind loading and dynamic forces. Consider both pushing and pulling forces, as these may differ in your application. For thruster control systems like Team WORX used, forces are relatively modest (typically 50-200 lbs), but boom deployment may require higher forces depending on boom weight and length.
Stroke Length
Determine the total distance the actuator must travel to achieve full deployment or positioning range. For thruster vectoring, relatively short strokes (4-8 inches) provide significant angular displacement. Deployable equipment may require longer strokes depending on stowed versus deployed geometry.
Speed Considerations
High-speed actuators enable rapid response for dynamic control systems like station-keeping, where quick thrust angle adjustments counteract changing environmental forces. Slower actuators suffice for equipment deployment where speed is less critical than smooth, controlled motion.
Position Feedback and Control
For closed-loop control systems, feedback actuators with built-in potentiometers or hall-effect sensors provide real-time position data. This enables the control system to command precise positions and verify that movements are executed as intended—critical for autonomous operation.
Environmental Protection Rating
Marine environments demand robust environmental protection. Look for actuators with appropriate IP (Ingress Protection) ratings—IP66 provides protection against heavy seas and deck washdown, while IP68 offers temporary submersion protection. Stainless steel components and sealed housings extend service life in saltwater conditions.
Legacy and Continued Research
The success of Team WORX's actuator-equipped vessel extended well beyond the competition itself. The project generated multiple academic publications documenting the control algorithms, mechanical design, and system integration approaches. Graduate-level research continued to build on the foundation established during the competition, exploring advanced topics in autonomous navigation, adaptive control, and sensor fusion.
The competition validated that student teams, given the right components and mentorship, can develop sophisticated autonomous systems that rival professional engineering efforts. The strategic use of reliable, precise actuation technology—specifically the high-speed and standard linear actuators—enabled capabilities that would have been difficult or impossible to achieve with alternative technologies.
Implementing Actuators in Your Marine Project
Whether you're building an autonomous research platform, automating systems on your personal vessel, or developing the next generation of marine robotics, the lessons from Team WORX's success provide a valuable blueprint.
Start with a clear understanding of your functional requirements: What needs to move? How far? How fast? How precisely? What forces are involved? From there, select actuators that meet those specifications with appropriate safety margins. Consider the complete system including mounting brackets, control boxes, and power supplies to ensure reliable integration.
For marine applications, don't underestimate the importance of proper mounting and mechanical design. Custom brackets that securely attach actuators to vessel structure while allowing free movement of connected mechanisms are critical. Team WORX's custom-designed mounts for both the thruster assemblies and hydrophone boom were essential to their success.
Finally, plan for testing and iteration. Even the best designs benefit from real-world validation. Pool testing, protected water trials, and gradually increasing sea state exposure allow you to identify and correct issues before they become critical failures.
Conclusion
Team WORX's first-place finish in the static judging portion of the Maritime RobotX Challenge demonstrated conclusively that well-implemented linear actuator systems can provide autonomous vessels with capabilities that set them apart from competitors. Their dual-control architecture with actuated thruster vectoring achieved station-keeping precision of less than 1.5 meters position error and less than 2 degrees heading error—performance that enabled successful execution of complex competition objectives.
The deployable hydrophone array, controlled by a 9-inch linear actuator, became the vessel's highest-scoring system, proving that strategic automation of sensor deployment can dramatically improve mission effectiveness. These successes emerged from thoughtful systems engineering that matched actuator specifications to application requirements and integrated mechanical, electrical, and software components into a cohesive whole.
As autonomous marine systems continue to evolve for commercial, defense, and research applications, the engineering principles demonstrated by Team WORX remain highly relevant. Electric linear actuators provide the precision, reliability, and control necessary to transform vessel capabilities—whether you're competing in robotics challenges, conducting oceanographic research, or simply adding automation to enhance your boating experience.
Frequently Asked Questions
What voltage linear actuators are best for marine applications?
Most marine vessels operate on 12V or 24V DC electrical systems, making these the most practical voltage options for marine actuators. Smaller vessels and recreational boats typically use 12V systems, while larger commercial vessels often employ 24V. Choose actuators that match your vessel's existing electrical infrastructure to simplify installation and avoid the need for voltage conversion. Both 12V and 24V actuators are available with force ratings from 50 lbs to over 1,000 lbs, covering the vast majority of marine automation needs.
How do I protect linear actuators from saltwater corrosion?
Saltwater environments accelerate corrosion, so selecting actuators with appropriate materials and environmental protection is essential. Look for actuators with stainless steel shafts, marine-grade aluminum or stainless steel housings, and IP66 or IP68 environmental ratings. IP66 provides protection against heavy seas and washdown spray, while IP68 offers protection against temporary submersion. Additionally, periodic freshwater rinsing after saltwater exposure and application of marine-grade lubricants to external mounting hardware will extend service life. For critical applications, consider actuators specifically designed and tested for marine environments.
Do I need feedback actuators for marine automation projects?
The need for position feedback depends on your application. Simple on/off applications like hatch opening or equipment deployment can often use standard actuators without feedback, relying on limit switches to detect fully extended and retracted positions. However, applications requiring precise positioning, closed-loop control, or multiple intermediate positions benefit significantly from feedback actuators. Team WORX's station-keeping system, for example, required continuous position feedback to adjust thruster angles dynamically. Feedback actuators with built-in potentiometers or hall-effect sensors provide real-time position data that control systems can use for accurate positioning and verification of commanded movements.
What are the key considerations for mounting actuators on boats?
Proper mounting is critical for actuator performance and longevity in marine applications. Key considerations include: ensuring mounting points are structurally sound and can handle actuator forces without flexing; using marine-grade stainless steel fasteners to prevent corrosion; designing mounting brackets that allow the actuator to move freely without binding or side-loading; accounting for the full range of actuator motion without interference from other components; and ensuring electrical connections are protected from water intrusion. Custom mounting brackets, like those designed by Team WORX, often provide the best fit for unique applications. Consider the full duty cycle—actuators should be sized with safety margins beyond the calculated load to account for dynamic forces from vessel motion.
What control systems work best with marine linear actuators?
Marine actuator control systems range from simple manual switches to sophisticated programmable controllers. For basic applications, weatherproof rocker switches or remote controls provide straightforward operation. More advanced applications benefit from dedicated control boxes that can manage multiple actuators, provide synchronized movement, and integrate position feedback. For autonomous systems like Team WORX's vessel, microcontrollers or single-board computers (such as Arduino platforms or Raspberry Pi) enable sophisticated control algorithms with sensor integration. The control system should match your technical capabilities and application complexity—there's no need for programmable control if simple manual operation suffices, but autonomous or synchronized movements require more sophisticated electronics.



