يمكن أن يكون مشروع أتمتة جديد شاقًا ؛ نعلم. من خلال جميع المصطلحات التقنية والأسلاك الكهربائية وواجهات التحكم في الكمبيوتر والأجراس والصفارات الأخرى ، قد يكون من الصعب معرفة مكان حتىيبدأ! عندما يمنع عدم اليقين مشروعك من التقدم ، فإن العودة إلى الأساسيات ومراجعة متطلبات مشروعك يمكن أن تظهر لك طريقًا للأمام. أحب أن أقول أن المعرفة هي القوة ، ولكنفهم هي العملة.
عند بدء مشروع أتمتة جديد ، أو إعادة تجديد واستبدال مشغل خطي في مشروع موجود ، ستساعدك هذه الأسئلة على تحديد المشغل (المشغلات) التي ستعمل في مشروعك.
- ما هو التطبيق؟
- هل تضع مشغلًا في تصميم أو منتج موجود؟
- هل تقوم بتصميم مشروع جديد من نقطة الصفر؟
- ما هو الحمل على الوحدة ، أو ، ما مقدار القوة التي تحتاجها؟*
- تصنيفات وزن المشغل هي ل أحمال محورية فقط. للتطبيقات غير الخطية (مثل المفصلات) ، قد تحتاج إلى حساب الحمل المحوري.
- ما مقدار السكتة الدماغية ("السفر") التي تحتاجها؟
- مطلوب سرعة الحركة؟
- المحرك ترتبط سرعة الحركة وتصنيف القوة عكسيا. قد تحتاج إلى الاختيار بين السرعة التي تريدها أو القوة التي تريدها ، اعتمادًا على التطبيق.
- كم مرة تحتاجها للعمل؟
- نحسب دورات الرسوم في 5 دقائق من الاستخدام المستمر (في حركة)؛ لا تحتاج معظم التطبيقات غير الصناعية إلى النظر في دورات العمل.
- شروط أخرى؟
- يمكن تضمين ميزات مثل حماية التصادم أو السرعة المخففة أو التحكم في السرعة المتغيرة بمكونات إضافية.
- يمكن في بعض الأحيان تحقيق وظائف أخرى من خلال المرحلات ، ومخططات التحكم ، والأسلاك الإبداعية.
بمجرد فهم جميع المعايير المذكورة أعلاه ، فأنت مستعد لبناء نظامك من المكونات. يتطلب نظام المشغل الأساسي هذه الأجزاء:
- المشغل (المشغلات) & أقواس التثبيت - أقواس محرك خاص. الرجوع إلى صفحات المنتج للحصول على قوسين مناسبة
- ضوابط (يُحوّل أو بعيد أو PLC)
- جزء التحكم في النظام مسؤول عن تبديل القطبية من دائرة المحرك ، التي تتحكم في اتجاه حركة المشغل.
- معظم القيود والشروط والمتطلبات للنظام الآلي تشارك في مخطط التحكم.
- التواصل مع الأنظمة الخارجية يمكن القيام به مع مكونات التحكم في مستويات مختلفة من المضاعفات.
- مصدر الطاقة - (تجاوز السحب التراكمي للمشغلات الخاصة بك)
- أسهل نظام ممكن هو نظام الطاقة والتحكم في CSPS، زائد واحد المحرك (مع سحب 5A).

بعد ذلك ، حان الوقت لتحديد أهم المتطلبات. نجد أن معظم المشاريع تتناسب مع إحدى الفئات التالية: الرفع/خفض الرفع ، حركة الانزلاق الأفقي ، والتشغيل المفصلي ، أو مشروع قائم على الدقة (مثال ،فوق، منصة ستيوارت ، أو معدات الاختبار العلمي). لن نعالج الدقة في هذه المقالة ؛ إذا كنت تقوم بتصميم تطبيق دقيق ، فإننا نوصي بالبدء في لدينا دروس المحركات التي تسيطر عليها أردوينو
تعد تطبيقات الرفع الرأسية وتطبيقات الشرائح الأفقية أبسط التخطيط - كل شيء متوازي ، لذلك لا توجد حسابات إضافية للحصول على تصنيفات السكتة الدماغية والوزن - مجرد إضافة بسيطة وجسم.
المصاعد الرأسية
واحدة من أكثر مباشرة إلى الأمام التطبيقات عبارة عن مصعد أو مصعد لأجهزة المطبخ-هذه المشاريع شائعة بدرجة كافية بحيث قمنا بإنشاء مجموعة من المشغلات بالكامل تقريبًا! مصاعد أجهزة المطبخ فقط قادرة على التحرك في خط عمودي ، مع دعم كبير من الإطار الصلب التلسكوبي.
واحدة من أكثر تستخدم على نطاق واسع تطبيقات الرفع الرأسية لمحركاتنا هي رفع سرير Van Camper. هذه العملية عبارة عن حركة رأسية مباشرة ، وعادة ما تنتشر عبر 2-4 مشغلات ، ومع متطلبات الحركة المتزامنة.
يستخدم كل من المشروعين أعلاه نفس المبدأ ، كما هو الحال في المثال أدناه. يتحرك المشغل شيئًا ما إلى أو خارج الطريق ، بحركة رأسية مستقيمة وبسيطة. الوحيد وظيفي الاختلافات بين المشاريع هي موضع المشغل بالنسبة للكائن المتحرك - معظم مصاعد الأسرة لديها محركات تحته الكائن؛ ستكون معظم مصاعد أجهزة المطبخ تحتها وخلفوقد يكون الآخرون حتى فوق أو بجوار الكائن المتحرك. في بعض التطبيقات المعينة ، يمكن استخدام بكرة. طالما لا المحرك ولا الكائن المتحرك يتم عرقلة ، والاتصالات المثبتة صلبة ، وستعمل العملية.
على سبيل المثال ، سوف ندعي أن لدينا ملف 20 "نافذة تمريرة يجب سحبها أعلى وخرج من الطريق للاستخدام. النافذة 25 رطلاً ، بما في ذلك الإطار. النافذة على المسارات. نحن بحاجة إلى أكثر أكثر من 25 رطلاً من الدفع/السحب ، وعلى الأقل مشغل (ق) من السكتة الدماغية.

يمكن تركيب المشغل (المشغل) في هذه العملية رأسياً في أي من الاتجاهين. في الصورة أعلاه ، تحتوي وحدة واحدة على قضيب أعلى و واحد تحت. تمثل النقاط الحمراء الأقواس أو المرفقات المطلوبة للحركة. يمكن أن تستخدم هذه العملية اثنين متزامن المحركات ، شنت بالتوازي ، لضمان وحتى حركة النافذة. هذه العملية يمكن أيضًا يتم ذلك بواسطة مشغل واحد ، فوق النافذة ، والسحب من الوسط - يجب أن تكون النافذة متوازنة جيدًا بما يكفي لا ربط أثناء العملية. إذا كان هذا مصدر قلق ، فإننا نوصي باستخدام شريحة سكة حديد أو شريحة درج أو دليل خطي آخر لضمان حركة غير ملزمة.
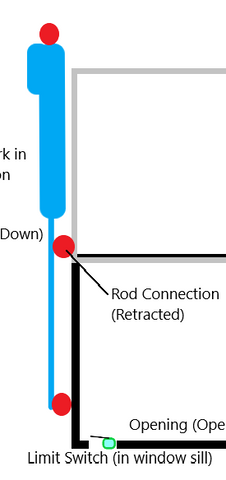
بعد ذلك ، الحركة الفعلية. هذه النافذة طولها 20 ". باستخدام أ مشغل خطي قسط لهذا المثال ؛ في وقت كتابة هذا التقرير ، لدينا خيار 18 بوصة ، وخيار stroke 24 بوصة - أي ما يجب أن نختاره؟ السكتة الدماغية هي أقصى قدر من الحركة يمكنك الحصول من الوحدة. أنت تستطيع دائماً تقييد الحركة بشكل أكبر مع مفاتيح الحد الخارجي. على سبيل المثال لدينا 20 "، 18" المحرك سيترك 2 "من النافذة داخل الافتتاح. وحدة 24 بوصة ، على الرغم من أطول ، يمكن أن تقتصر على 20 "نطلب ، دون الكثير إضافي اعتبار. لا نريد أن يقوم المحركات بالقيادة المميتة بعد إغلاق النافذة ، لأن هذا قد يؤذي النافذة أو أصابع شخص ما أو المشغل أو كل ما سبق. نوصي باستخدام مفتاح الحد الخارجي لإيقاف العملية عند اكتمال الحركة المطلوبة. انقر هنا لمزيد من المعلومات حول التثبيت والأسلاك مفاتيح الحد الخارجي.
في مشروع المثال ، يجب أن نستخدم مفتاح الحد الخارجي لإيقاف المشغل على مغلق أو خفضت موضع. لهذا ، سنقوم بتصنيع موضع التراجع (لأعلى) من النافذة مع تراجع بالكامل موقف المشغل ؛ هذا يستخدم جانب التراجع تبديل الحد الداخلي للمشغل لتقييد الحركة لأعلى ، وسيقوم مفتاح الحد الخارجي بإيقاف التمديد (خفض) بمجرد اتصال النافذة مع العتبة.
يجب أن نأخذ أفقي بُعد النافذة في الاعتبار الأسلاك ، لكنه لن يكون له أي تأثير على العملية.
الشرائح الأفقية
يمكن حساب العملية الأفقية المنزلق بنفس الطريقة التي يتم بها تشغيل التشغيل الرأسي ، لكن متطلبات الحمل ستتغير. تشمل العمليات الأفقية المشتركة أدراجًا أو سلالمًا أو درجًا خفية متحركًا جانبيًا أو منصات تمتد (مثل الألواح الشمسية القابلة للنشر).

عند أتمتة الحركة الأفقية ، فإن الخطوة الأولى هي إنشاء الحركة لتكون تلقائيًا. تستخدم معظم المشاريع شريحة درج أو شريحة سكة حديد لهذا الغرض. في هذا التطبيق ، الشريحة هي في الحقيقة تحمل وزن الحمل ، لذا فإن اختيار الدليل الخطي أو الشريحة الصحيح أمر بالغ الأهمية. سترغب في تثبيت مكونات الشريحة الخطية أولاً وتأكد من أن الحركة تعمل عن طريق دفع التطبيق بيدك (إن أمكن).

لقد أثبتنا بالفعل أن المشغل في هذا التطبيق يفعل لا ادفع الوزن الكامل للكائن. بدلاً من ذلك ، يحتاج المشغل فقط إلى التغلب على احتكاك على الأدلة الخطية - اعتمادًا على ما استخدمته ، قد تكون هذه القيمة منخفضة للغاية. إذا لم تتمكن من الحصول على قوة تقريبية من تحريك الكائن بنفسك ، فيمكنك حساب الاحتكاك/عزم الدوران التراكمي للشرائح الخاصة بك بناءً على وزن الكائن المتحرك ، ثم تأكد من أن المشغل يتجاوز هذه القيمة. الخيار الأخير هو تحديد مشغل استطاع الرفع رأسيا الكائن ، الذي يضمن أنه سينقل الكائن من خلال حركة انزلاق أفقية.
اللوحات أو الأغطية المفصلية
نوع المشروع المشترك الثالث هو تطبيق مفصلي. لدينا بالفعل ملف آلة حاسبة للمساعدة في هذا - ومع ذلك هذا المقال لن معالجة كيفية استخدام آلة حاسبة المشغل الخطي. (انقر هنا للحصول على مقالة تعليمية LAC).

يتطلب التطبيق المفصلي بعض علم المثلثات وحسابات الفيزياء البسيطة ، إذا تم القيام به من نقطة الصفر. كما هو الحال دائمًا ، فإن الخطوة الأولى هي تحديد الحركة وضمان أن الكائن المتحرك يمكنه التعبير بشكل فعال حول المفصلات.

يسمح التطبيق المثالي للمشغل بدفع الكائن المتحرك على طول مسار الحركة. مسار حركة هذا الكائن هو قوس ، وليس خطًا مستقيمًا - وهذا يعني أن زاوية الهجوم للمشغل سوف يتغير أثناء العملية - مما يعني بدوره أن قوة مطلوبة لحظة سوف يتغير من خلال العملية كذلك. في هذه الحالات ، تعد زاوية المشغل بالنسبة للكائن المتحرك (الغطاء أو الرفرف) مهمًا للغاية. ستؤثر المواقف المتصاعدة على هذه الزاوية ، وكذلك القوة ؛ ربما أدركت ذلك هذا التطبيق لديه 3 متغيرات أن كل ما يتغير ويؤثر على قيمة الآخرين. هذه المتغيرات هي طول السكتة الدماغية للمشغل ، وموقف تخصيص الكائن بالنسبة لمفصل المفصلات ، وقوة المحرك المطلوبة. يوصى بالتركيز على المسافات والسكتة الدماغية أولاً، ثم احسب متطلبات الوزن لهذا الموقف المعني.

عندما يتم "إغلاق" الرفرف/الكائن ويتم سحب المشغل ، يجب أن تكون نقاط التثبيت هي طول الفتحة إلى حفرة من المشغل الذي تم ترحيله ، وعندما يتم فتح رفرف/كائن طول المشغل الممتد بصرف النظر - قد تقتصر السكتة الدماغية التي تكون طويلة جدًا على الطول الصحيح ، لكن السكتة الدماغية القصيرة جدًا لن تحرك الكائن بالكامل. الآلة الحاسبة المذكورة سابقا مصمم للمساعدة في هذه التقديرات. انقر هنا لهذا البرنامج التعليمي.

إذا كانت نقاط التثبيت أقرب إلى المفصلة، ستتطلب العملية أ قوة أعلى ، محرك أقصر السكتة الدماغية. إذا كانت نقاط التثبيت الخاصة بك أبعد من المفصلات ، فستتمكن من استخدام ملف القوة السفلية المحرك مع طول السكتة الدماغية أطول. للمشاريع المفصلية ، هناك تقريبا دائما نطاق من إمكانيات المشغل الوظيفي ، الأمر متروك لك لتحديد أي خيارات سوف تناسب مشروعك بشكل أفضل.
ربما تكون قد أدركت أننا نحدد نقطتين على متن طائرة تصنع مثلثًا عند نشرها - هذا هو علم المثلثات الذي يمكن استخدامه لحساب طول السكتة الدماغية من الصفر. قد يحدد هذا المنطق أيضًا نقطتان محتملان للتصاعد، في هذه الحالة ، سيعمل أي من الموقعين ، لكن سيكون لديهم دائمًا قيم تحميل مختلفة. مثال على شكل هذا أدناه.
موقف التثبيت 1: سيكون لهذه العملية ملف انخفاض وزن الحمل، كما هي مواقف التثبيت أقرب إلى عمودي عندما يكون الكائن في الموضع الأفقي ، وهو عندما يكون هناك معظم الحمل على المحرك. الميزة الميكانيكية أعلى مع هذا التصميم.

موقف التثبيت 2: سيتطلب هذا التصميم أ مشغل قوة أعلى؛ هذا لأن المشغل زاوية تجاه المفصل. هذا يتطلب المزيد من القوة المطلوبة بدء التحرك الكائن.




