Potentiometers
Potentiometers, جو متغیر مزاحمت کار ہیں, لکیری actuators میں استعمال کیا جاتا ہے کہ کس طرح ان کی مزاحمت تبدیلیوں پر پوزیکشنل آراء کی بنیاد فراہم کرتے Linear actuators جو رائے کے لئے potentiometers استعمال کرتے ہیں, ہماری طرح فیبیک راڈ Linear Actuator, 3 اضافی تاروں پر مشتمل ہوگا جیسا کہ نیچے دکھایا گیا ہے, تار 1 ان پٹ وولٹیج کے لئے, تار 2 ہے. متغیر مزاحمت, اور تار 3 زمین کے لئے ہے. تار 2, پٹ, اور زمین کے درمیان وولٹیج کی پیمائش کر کے آپ پوٹینومیٹر کی پیداوار کو پڑھ سکتے ہیں, جو کہ لکیری دالہ کی مطلق حیثیت کا ایک اشارہ فراہم کرے گا. اس رائے کو استعمال کرنے کے لئے, آپ کو کسی قسم کے مائیکرو کنٹرولر کے استعمال کرنے کی ضرورت ہو گی, جیسا کہ ایک Arduino, اس مثبت قدر کو پڑھنے کے لئے بیمہ کی چالوں کے طور پر.

ایک Potentiometer سے ممکنہ Feedback
کی متغیر مزاحمت کے طور پر لکیری actuator چالوں کے طور پر تبدیلی, تار 2 اور زمین کے درمیان وولٹیج فرق کو تبدیل کرے گا. اس کی وجہ سے, رائے کو آسانی سے ایک کنٹرولر کے سافٹ ویئر میں, ایک Arduino طرح نمٹا جا سکتا ہے کے طور پر آپ کو صرف تار 2 سے زمین پر تار کی وولٹیج کا موازنہ ایک Arduino کا استعمال کرتے ہوئے, یہ صرف ایک microکنٹرولر کے پن میں ایک ینالاگ کا استعمال کرتے ہوئے اور تار 2 سے وولٹیج پڑھنے کے لئے () کی تقریب کا استعمال کرتے ہوئے کی طرف سے کیا جا سکتا ہے. کس طرح پوٹیمیٹر کی رائے کے ساتھ ایک لکیری actuator کو ایک Arduino کو مربوط کرنے کی ایک مثال ذیل میں دکھایا گیا ہے.

کے پنوں میں ینالاگ Arduino کے مطابق ہیں-ڈیجیٹل کنورٹرس (ADC), جو کہ تار 2 پر ینالاگ وولٹیج کو ایک 10-سا ADC قدر میں تبدیل کرے گا جو کہ 0 سے 1023 کے درمیان ہوگا. A 10-سا ADC قدر کا مطلب کنورٹر 0 سے 1023 تک 2 ^ 10 یا 1024 مختلف اقدار میں ینالاگ سگنل کا ترجمہ کرے گا. تمام microکنٹرولرز 10-سا اے ڈی سی, کچھ ہیں 8-سا یا 16-سا, اور بٹس کی زیادہ تعداد ADC کی قرارداد زیادہ ہے. ایک بار جب آپ نے ایک ڈیجیٹل قدر میں ینالاگ سگنل تبدیل کیا ہے, فالج لمبائی کے لحاظ سے ایک پوزیشن کی قیمت کا تعین کرنے کے لئے, جیسا کہ انچ میں, آپ کو 0 سے 1023 تک رینج نہیں ہو سکتا ہے کے طور پر آپ کے خاص لکیری actuator کی صحیح ینالاگ رینج تلاش کرنے کے لئے کی ضرورت ہو گی. یہ اس وجہ سے ہے کہ آپ کو مکمل طور پر اس کی حد کو گھومنے کی روک تھام کی روک تھام کے اندر اندر gearbox کی وجہ سے ہے اور آپ کو دستی طور پر اس حد کا تعین کرنے کوڈنگ مثال کے طور پر ذیل میں, 4 " فالج کی لمبائی کی رفتار راڈ Linear Actuator 0 "اور 4 میں 951 کی ایک مثل قیمت 44 پر ایک ینالاگ قیمت تھی". ان اقدار کو استعمال کرتے ہوئے, آپ ذیل کی طرح فالج لمبائی کی قدر کا تعین کرنے کے لئے تناسب کا استعمال کر سکتے ہیں:

اس کو سٹروک Length = 0.00441 * (اینالوگ ویلیو-44) میں آسان کیا جا سکتا ہے جیسا کہ نیچے دی گئی کوڈنگ مثال میں. آپ کس طرح اکثر آپ کے مائیکرو کنٹرولر کے کوڈ میں اس ینالاگ قدر کو پڑھا ایک اور اہم غور ہے. نیچے کوڈ کی مثال میں Arduino potentiometer پڑھتا ہے اور جب تک actuator آگے بڑھ رہا ہے پوزیشن قدر کو اپ ڈیٹ. لیکن آپ کو بھی وقت کی ایک سیٹ وقفہ سے زیادہ پوزیشن کی قیمت کو اپ ڈیٹ کرنے کے لئے اندرونی timers کے استعمال کر سکتے ہیں یا آپ کو صرف کوڈ کے مرکزی لوپ کے اندر تقریب پڑھیں اور مسلسل پوزیشن کی قیمت کو اپ ڈیٹ کر سکتے تھے. اگرچہ مؤخر الذکر سفارش نہیں ہے اگر آپ ایک سے زیادہ انفرادی افعال انجام دینے کے لئے آپ کے کنٹرولر کو استعمال کرنے کی منصوبہ بندی.
https://gist.github.com/OMikeGray/4dec9e075a8fe41efaea001fa1e98d70
الیکٹریکل شور سے نمٹنا
Potentiometer سے رائے کی ایک واپسی ہے کہ یہ بجلی کے شور سے متاثر کیا جا سکتا ہے اور آپ کی پوزیکشنل قدر غیر مستحکم کر سکتا ہے. اس پر قابو پانے کا ایک طریقہ یہ ہے کہ برقی شور کو دور کرنے اور مستحکم نتائج حاصل کرنے کے لیے ایک ڈیجیٹل فلٹر استعمال کیا جائے. فلٹرز کی چند مختلف اقسام ہیں جو کہ اسیاتی فلٹرز سے ہائی-پاس اور بینڈ کو استعمال کیا جا سکتا ہے-پاس کے فلٹرز کو اپنے اپنے فوائد کے ساتھ, لیکن لکیری actuators کے ساتھ بہت سے پروگراموں کے لئے, صرف پوزیکشنل کی اوسط کا استعمال کرتے ہوئے کام کرے گا. ایک چلانے اوسط صرف ان پٹ سگنل باہر ہموار کرنے کی پیمائش کی آخری X رقم کی اوسط ہے. آپ کی درخواست کی درست تعداد آپ کی درخواست پر منحصر ہو گی اور آپ کو اس نمبر کے ساتھ کھیلنے کی ضرورت ہو سکتی ہے جو اس بات کا تعین کرے کہ بہترین کام کیا ہے. کچھ چیزوں کے بارے میں جاننے کے لئے, اگر آپ کے اوسط میں بہت کم پیمائش ہے, آپ کے اشارہ اب بھی شور ہو جائے گا, لیکن اگر آپ کو بہت زیادہ پیمائش ہے, تو آپ کے نتائج سے بہت دور تلاش کرنے کے لئے actuator کی اصل پوزیشن کے پیچھے پڑے گا. یہ بہت کم اور بہت سی پیمائش کے درمیان توازن تلاش کر رہا ہے جو آپ کے فلٹر کو مؤثر بنا دے گا. ذیل میں اصل ان پٹ سگنل کے مقابلے میں ایک چلانے اوسط فلٹر کا اثر دکھا ایک پلاٹ ہے.
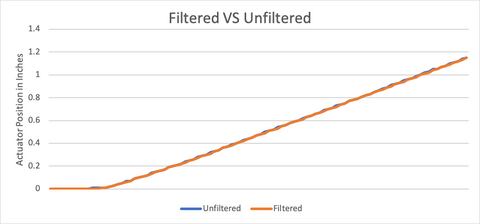
چلانے کی اوسط کو لاگو کرنے کے لئے استعمال کیا کوڈ ذیل میں دکھایا گیا ہے, یہ ان پٹ سگنل کو ہموار کرنے کے لئے 3 پیمائش کی اوسط استعمال کرتا ہے. تین پیمائش کا انتخاب کیا گیا کیونکہ اصل ان پٹ سگنل میں بہت زیادہ شور نہیں تھا, لہذا اس قدر کو ہموار کرنے کے لئے صرف چند پیمائش کی ضرورت تھی. اگر ان پٹ سگنل میں زیادہ شور ہوتا تو بڑی تعداد میں پیمائش کی ضرورت ہوتی. ایسے حالات میں جہاں پر بہت زیادہ واضح اجزاء موجود ہوں (یعنی موٹروں) برقی شور ایک بہت بڑا مسئلہ ہو گا.
https://gist.github.com/OMikeGray/b13f156c080a100a89e5bbd541d0565e
میشن کے لئے Feedback.
آپ کے ڈیزائن میں آراء کو لاگو کرنے کے بارے میں بڑی بات یہ ہے کہ یہ آپ کو ایک خود پیدا کرنے کے لئے کی اجازت دیتا ہے کہ ایک دیئے گئے ان پٹ کے لئے ہونے کے لئے جہاں ایک خود کار نظام میں potentiometer آراء کو استعمال کرنے کے لئے آپ کو صرف اپنے لکیری جانکار کی توسیع کی لمبائی اصل پوزیشن کو جو کہ potentiometer کی طرف سے دیا جاتا ہے کا موازنہ کر سکتے ہیں. اس کے بعد آپ کو صرف اپنے موبایٹر کو بتانے کی ضرورت ہے کہ وہ اس کے مطابق کام کرے. اگرچہ ایک خود کار نظام میں potentiometer آراء کو استعمال کرتے ہوئے چند مسائل آپ پر قابو پانے کی ضرورت ہو سکتی ہے. ایک تو برقی شور کا مسئلہ ہے جس پر بحث کی گئی, دوسرے یہ کہ وہ قابل عمل نتائج حاصل کرنے میں کامیاب ہو رہے ہیں. Potentiometers عام طور پر لکیری actuator کی چھوٹی نقل و حرکت کے لئے حساس طور پر نہیں ہیں کے طور پر, دیگر آراء کے اختیارات کے مقابلے میں, اس سے زیادہ مشکل درست نتائج کے حصول ہوتا ہے. عملی طور پر, اس کا مطلب ہے کہ آپ کو آپ کی مطلوبہ پوزیشن کے ارد گرد غلطی کا مارجن ہو گا, جو آپ کی دی گئی درخواست کے لئے قابل قبول ہو سکتا ہے. اگر آپ کو بہت سی درست پوزیشننگز کی ضرورت نہیں ہے یا آپ کے سسٹم کو خودکار کرنے کے لئے ایک مائیکرو کنٹرولر کے ساتھ ایک دستی سوئچ کی جگہ ہے تو آپ کے لئے ایک پوٹیٹر سے مثبت رائے دی جائے گی. اگر آپ کو اپنے لکیری بیمہ سے درست پوزیشننگ کی ضرورت ہے, تو آپ کو غور کرنے کی ضرورت ہو سکتی ہے دیگر آراء کے آپشنز اپنے لکیری بیمہ کے لئے یا زیادہ قابل اعتماد نتائج فراہم کرنے کے لئے اضافی اجزاء شامل کریں. ان اجزاء میں سینسر یا باہری کڑیاں جو آپ کو مطلق المقام کے بہتر اشارے دے سکتے ہیں.

قابل عمل نتائج حاصل کرنے کے قابل نہیں بھی ایک مسئلہ ہے جب آپ کو کنٹرول ایک سے زیادہ لکیری actuators. Potentiometer کے آؤٹ پٹ سگنل آسانی سے دوسرے actuators سے بجلی کے شور سمیت بجلی کے شور سے متاثر ہے, اور ایک سے زیادہ لکیری actuators اقدام کو یقینی بنانے کے, potentiometer کو ان پٹ وولٹیج پر منحصر ہے کو چیلنج کیا جا سکتا ہے. ڈیجیٹل فلٹرز کو استعمال کرتے ہوئے, پوٹیمامیٹر کو مستحکم ان پٹ وولٹیج کی ضمانت دیتے ہوئے, اور آؤٹ پٹ سگنل تاروں کو دوسرے آگامیٹک اجزاء سے دور چلانے کے لئے, تمام مدد کو یقینی بنانے میں مدد ملے گی. اگرچہ, اگر آپ بیک وقت ایک سے زیادہ actuators کے چلانے کے لئے چاہتے ہیں, تو یہ بہتر ہو سکتا ہے کہ آپ باہر چیک کر سکتے ہیں دیگر آراء کے آپشنز لکیری بیمہ کے لئے.



