Потенциометр
Потенциометр - это переменный резистор, используемый для линейного привода, который обеспечивает обратную связь положения в зависимости от изменения его сопротивления. Линейные исполнительные устройства, использующие потенциометры для обратной связи, такие как наши линейный привод с рычагом обратной связиОн будет состоять из трех дополнительных проводов, указанных ниже, провод 1 для входного напряжения, провод 2 для Переменные Резистор, провод 3 для заземления. Вы можете прочитать выход потенциометра, измерив напряжение между проводом 2, выходом и заземлением, что даст указание на абсолютное положение линейного исполнительного устройства. Чтобы воспользоваться этой обратной связью, вам нужно использовать определенный тип микроконтроллера, например, АрдуиноДля чтения значения положения при движении привода.

Позиционная обратная связь потенциометра
По мере перемещения линейного исполнительного устройства изменяется переменный резистор потенциометра, а разница напряжения между проводом 2 и заземлением изменяется. Из - за этого обратная связь может быть легко обработана в программном обеспечении контроллера, таком как Arduino, так как вы можете просто сравнить выходное напряжение провода 2 с землей. С Arduino это можно сделать просто, используя аналоговый входной вывод микроконтроллера и считывая напряжение провода 2 с помощью функции analog read (). Ниже показан пример того, как подключить Arduino к линейному приводу с обратной связью потенциометра.

Вывод аналогового ввода Ардуино Это модульный преобразователь (ADC), который преобразует аналоговое напряжение на проводе 2 в 10 - битное значение ADC между 0 и 1023. 10 - битное значение ADC означает, что преобразователь преобразует аналоговый сигнал в 2 ^ 10 или 1024 различных значения в диапазоне от 0 до 1023. Не все микроконтроллеры являются 10 - битными ADC, некоторые 8 - или 16 - битными, и чем больше цифр, тем выше разрешение ADC. После преобразования аналогового сигнала в цифровое значение, чтобы определить значение положения длины хода (например, дюйм), вам нужно найти точный аналоговый диапазон для конкретного линейного привода, поскольку он может быть не от 0 до 1023. Это потому, что коробка передач внутри исполнительного устройства не позволяет потенциометру полностью вращаться до предела, а это означает, что вам нужно определить этот диапазон вручную. Примеры кодирования ниже 4 "Линейный исполнительный механизм с обратной связью по длине хода В 0 "на месте" имеется аналоговое значение 44, а в 4 - аналоговое значение 951. Используя эти значения, можно использовать соотношение для определения длины штриха, как показано ниже:

Это можно упростить до длины штриха = 000441 * (аналоговое значение - 44), как в приведенном ниже примере кодирования. Частота чтения аналогового значения в коде микроконтроллера является еще одним важным соображением. В приведенном ниже примере кода Arduino читает потенциометр и обновляет значение местоположения, пока исполнительный механизм движется. Тем не менее, вы также можете использовать внутренний таймер для обновления значений местоположения через заданные интервалы времени, или вы можете просто поместить функцию считывания потенциометра в основной цикл кода и постоянно обновлять значения местоположения. Хотя, если вы планируете использовать контроллер для выполнения нескольких отдельных функций, последнее не рекомендуется.
https://gist.github.com/OMikeGray/4dec9e075a8fe41efaea001fa1e98d70
Обработка электрических шумов
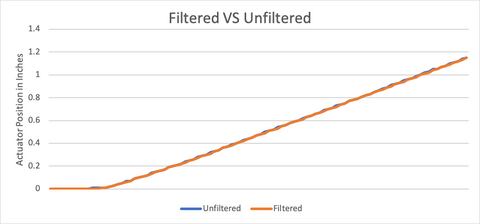
Недостатком потенциометрической обратной связи является то, что она может быть подвержена воздействию электрического шума и может дестабилизировать значение вашего положения. Одним из способов преодоления этой проблемы является использование цифровых фильтров для устранения электрического шума и получения стабильных результатов. От экспоненциальных фильтров до высокочастотных и полосовых фильтров практически нет различных типов фильтров, каждый из которых имеет свои преимущества, но для многих приложений с линейными приводами достаточно использовать среднее значение положения. Запуск среднего значения - это только среднее значение последнего X измерения сглаживания входного сигнала. Точное количество измерений, которое вы хотите получить в среднем, будет зависеть от вашего приложения, и вам, возможно, придется использовать это число, чтобы определить, что является наиболее эффективным. Несколько моментов, на которые следует обратить внимание, заключаются в том, что если вы измеряете слишком мало, ваш сигнал все равно будет шумным, но если вы измеряете слишком много, ваш результат будет значительно отставать от фактического местоположения привода и не может быть использован. Это баланс между слишком малыми и слишком большими измерениями, которые сделают ваш фильтр эффективным. На диаграмме ниже показано влияние запуска фильтра среднего размера на фактический входной сигнал.
Код, используемый для достижения среднего значения выполнения, показан ниже, и он использует среднее значение трех измерений для сглаживания входного сигнала. Три измерения были выбраны потому, что в фактическом входном сигнале не было много шума, поэтому для сглаживания этого значения требовалось всего несколько измерений. Если в входном сигнале больше шума, необходимо провести дополнительные измерения. При наличии большого количества индуктивных элементов (т.е. двигателей) электрический шум будет еще более серьезной проблемой.
https://gist.github.com/OMikeGray/b13f156c080a100a89e5bbd541d0565e
Автоматизация с использованием обратной связи
Преимущество обратной связи в дизайне заключается в том, что она позволяет создать автоматическую систему, которая знает, где находится данный вход. Чтобы использовать потенциометрическую обратную связь в автоматизированной системе, вы можете просто сравнить ожидаемую длину расширения линейного исполнительного устройства с фактическим местоположением, указанным потенциометром. Затем вам просто нужно сказать своему приводу, чтобы он растянулся или отступил соответствующим образом. Хотя есть некоторые проблемы с использованием потенциометрической обратной связи в автоматизированных системах, вам, возможно, придется преодолеть их. Один из них - проблема электрического шума, о которой говорилось выше, а другой - возможность получения повторяемых результатов. Потенциометры обычно менее чувствительны к меньшим движениям линейных приводов по сравнению с другими вариантами обратной связи, что затрудняет достижение точных повторяемых результатов. На практике это означает, что у вас будет диапазон ошибок вокруг того места, которое вы хотите, что может быть приемлемым для вашего заявления. Если вам не нужно очень точное позиционирование или заменить ручной переключатель микроконтроллером из вашей системы, обратная связь с местоположением потенциометра будет достаточно точной для вас. Если вам действительно нужно точное позиционирование линейного привода, вам, возможно, придется подумать Другие варианты обратной связи Для линейного привода или добавления дополнительных компонентов, чтобы обеспечить более надежные результаты. К ним относятся датчики или Внешний ограничительный переключатель Это может дать вам лучший абсолютный показатель местоположения.

Когда вы управляете несколькими линейными приводами, невозможность достижения повторяющихся результатов также является проблемой. Поскольку выходной сигнал потенциометра уязвим для электрического шума, в том числе от других приводов, и зависит от входного напряжения потенциометра, обеспечение одновременного перемещения нескольких линейных приводов может быть проблемой. Использование цифровых фильтров для обеспечения стабильного входного напряжения потенциометра и удаления выходной линии сигнала от других индуктивных элементов поможет обеспечить более повторяемые результаты. Тем не менее, если вы действительно хотите запустить несколько исполнительных устройств одновременно, лучше проверить Другие варианты обратной связи Для линейных приводов.



