FA-Sync-X synchrone controlebord
De Firgelli Automatisering FA-Sync-2 en FA-Sync-4 Synchrone Control Board stelt u in staat om maximaal 2 en 4 lineaire actuatoren te besturen, en ervoor te zorgen dat ze in stap en met dezelfde snelheid gaan, ongeacht de belasting. Dit zal uw ontwerp ook beschermen, omdat niet -gesynchroniseerde beweging kan leiden tot buiging en schade van de belasting of de actuatoren. Dit is belangrijk in toepassingen waarbij meer dan één actuator wordt gebruikt om dezelfde belasting te verplaatsen als met vangoors, RV -dakliften en tonneau -covers. Deze boards vereisen lineaire actuatoren die interne feedback hebben en alle lineaire actuatoren moeten van hetzelfde type zijn met dezelfde slaglengte en kracht. Het gebruik van verschillende lineaire actuatoren zal niet werken en het bord kan niet zorgen voor synchrone beweging. Bekijk voor een lijst met compatibele en niet compatibele lineaire actuatoren de FA-Sync-X productpagina.
Waarom FA-Sync-X-bord gebruiken met een Arduino?
Gebruik van zowel een Arduino En met een FA-Sync-X-bord kunt u de voordelen van beide boards behalen. Met de Arduino kun je veel grotere automatisering implementeren met vergelijking met het gebruik van een schakelaar met het FA-Sync-X-bord. Hoewel u uw eigen synchrone controller met een Arduino kunt ontwikkelen, zal het gebruik van het FA-Sync-X-bord de complexiteit van de Arduino's code drastisch verminderen en zullen uw lineaire actuatoren tegelijkertijd bewegen. Het gebruik van deze planken samen is ideaal voor toepassingen waarbij u meerdere lineaire actuatoren nodig hebt om te bewegen op basis van input van een sensor of op basis van een interne timer, zoals het positioneren van zonnepanelen om maximaal zonlicht te bereiken.

Instellen en kalibratie
Het instellen van de FA-Sync-X-boards om te worden bestuurd door een Arduino wordt op een vergelijkbare manier gedaan als in andere toepassingen en je moet de handleiding voor deze boards dit goed doen. Het aansluiten van de lineaire actuatoren met de FA-SYNC-X-planken wordt nog steeds gedaan met behulp van de 2 of 4 6-pins terminalblokken en verbind het vermogen, de grond, sensorvermogen, sensorgrond, sensoruitgang 1 en sensoruitgang 2 draden van de Lineaire actuator naar de overeenkomstige terminal in het terminalblok. U zult ook het FA-SYNC-X-bord op dezelfde manier voeden door de voedingsspanning, 12V of 24V, te verbinden met het vermogen in 2-pins terminalblok, dat links van de 6-pins terminalblokken bevindt. U moet ervoor zorgen dat u de positieve en negatieve leads van de stroomvoorziening naar de juiste invoeraansluiting, want als ze worden omgedraaid, veroorzaakt dit permanente schade aan het FA-Sync-X-bord. Om uw FA-Sync-X-bord te kalibreren, volgt u nog steeds dezelfde procedure als beschreven in de handleiding van deze boards.

Zodra het FA-SYNC-X-bord is aangesloten en gekalibreerd, kunt u het interfaces met het Arduino-bord. U bestuurt nog steeds het FA-SYNC-X-bord met behulp van het besturingsaansluitblok, het meest 2-pins terminalblok, maar in plaats van een schakelaar of afstandsbediening te gebruiken om de richting van de lineaire actuatoren te regelen, gebruikt u een Arduino. Een probleem is dat de Arduino geen ingangsspanning hoog genoeg zal leveren om de interne relais van het FA-Sync-X-bord te regelen, maar we kunnen gebruiken externe relais om dit probleem op te lossen. Zoals wanneer Controle van een lineaire actuator met een Arduino, we kunnen gebruik maken van 2 SPDT-relais om het FA-Sync-X-bord te besturen. We moeten de COM -pin van elk relais aansluiten op een van de pennen van het besturingsaansluitblok en de normaal open (geen) pin van elk relais aansluiten op het positief van de voeding en normaal gesproken sluiten (NC) pin van elk relais tot het negatieve van de voeding. U controleert beide externe relais met de digitale pennen van de Arduino, zoals hieronder gezien. In dit geval moet u ook de estafettebord Ook de Arduino gebruiken.
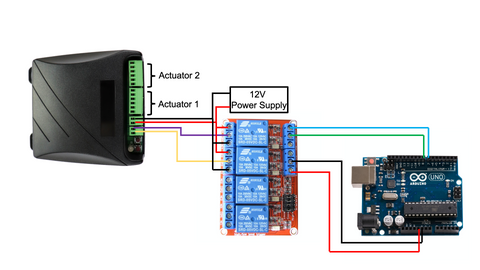
Controle van het FA-Sync-X-bord met een Arduino
Zodra Arduino en het FA-SYNC-X-bord zijn aangesloten en het FA-SYNC-X-bord is verbonden en gekalibreerd op uw lineaire actuatoren, kunt u ze regelen met behulp van inputs voor de Arduino. Hoewel de code voor de Arduino om inputs van sensoren te lezen, variëren op basis van de sensoren die u in uw toepassing gebruikt, zal de code om het FA-SYNC-X-bord te bedienen vergelijkbaar zijn. De code om het FA-SYNC-X-bord te besturen zal erg vergelijkbaar zijn met de code die wordt gebruikt om een lineaire actuator met een Arduino te besturen. Om de lineaire actuatoren uit te breiden, moet u pin A op het besturingsaansluitblok van het FA-Sync-X-bord verbinden met een positieve spanning, terwijl u pin B verbindt op aarde. Om dit met de Arduino te doen, moet je gewoon het lagere relais bekrachtigen door de invoer voor dat relais te verbinden met de grond (zoals het hierboven gebruikte relaisbord actief is) en het zal pin A verbinden met een positieve spanning. Pin B wordt al verbonden met de grond, omdat elk relais is verbonden met de grond wanneer deze niet wordt bekrachtigd volgens onze opstelling. Om de lineaire actuatoren in te trekken, volgt u dezelfde stappen, maar voor pin B. U zult de bovenste relais bekrachtigen die Pin B verbindt met een positieve spanning door de bedieningspen van dat relais met de grond aan te sluiten. Om de lineaire actuatoren te stoppen, wordt u eenvoudigweg alle spoelen ontworpen en worden PIN A en B verbonden met de grond. Het onderstaande codevoorbeeld toont het gebruik van de code om de lineaire actuatoren uit te breiden, in te trekken en te stoppen zoals hierboven beschreven. De code laat niet zien hoe invoersensoren of timers worden gebruikt die worden gebruikt om te regelen wanneer ze moeten stoppen en de lineaire actuatoren moeten verplaatsen, omdat deze variëren op basis van gebruikte sensoren en toepassing.
Nadelen
Het grootste nadeel van het gebruik van een FA-Sync-X-bord met een Arduino is dat de Arduino zelf de exacte positie van de lineaire actuator niet zal kennen. Aangezien de feedback die in het FA-Sync-X-bord wordt gestuurd, niet wordt gedeeld met de Arduino, heeft het geen manier om precies te weten waar de actuator is. Dit kan het niveau van automatisering en controle beperken die u hebt ten opzichte van uw lineaire actuatoren, omdat u deze niet kunt positioneren op basis van feedback, hoewel dit geen probleem is als u de lineaire actuator alleen volledig uitstrekt en intrekt. De eenvoudigste oplossing om dit te overwinnen is om te schatten hoe ver uw actuator per milliseconde beweegt en de interne timer van Millis () te gebruiken om de positie te schatten op basis van de totale tijd die de actuator loopt, hoewel dit u geen precieze positionering geeft . Als u een precieze positie nodig heeft, kunt u dit probleem overwinnen door een extern feedback -element aan uw ontwerp toe te voegen, zoals eenexterne lineaire potentiometer, om feedback te geven aan de Arduino.

Samenvatting
Hoewel er enkele nadelen zijn om te gebruiken FA-Sync-X-bord Met een Arduino, ze zijn misschien geen probleem in uw ontwerp. Met behulp van deze boards samen kunt u zorgen voor een gelijktijdige beweging van meerdere lineaire actuatoren, ongeacht de belasting met een groter niveau van automatisering. Het gebruik van deze boards in combinatie met elkaar is ideaal voor toepassingen waarvoor u meerdere lineaire actuatoren moet gebruiken om een enkele belasting te verplaatsen en u wilt de beweging automatiseren op basis van timer- of sensorinvoer.



