Wat is een Arduino?
Arduino is een open source-platform voor elektronica op basis van flexibele, gemakkelijk te gebruiken hardware en software. Het is bedoeld voor doe -het -zelfprojecten, kunstenaars, ontwerpers, hobbyisten en iedereen die geïnteresseerd is in het creëren van interactieve projecten. Arduino's zijn microcontroller -boards die alles bevatten wat u nodig hebt om eenvoudig te communiceren met de microcontroller. Een microcontroller is als een mini-computer voor ingebedde systemen en het type microcontroller is afhankelijk van de stijl van Arduino. Arduino varieert van de grotere Arduino Mega naar de middelgrote Arduino Uno aan de kleinere Arduino Pro Mini. De verschillende grootteborden bieden een toenemend aantal I/O -pinnen en extra functies en de meest populaire van deze boards is de UNO. Arduino biedt ook een open source gratis te gebruiken IDE om uw microcontrollers te programmeren. De Arduino IDE gebruikt een gemakkelijk te begrijpen programmeertaal en vanwege de populariteit van Arduino kunt u veel nuttige voorbeelden online vinden om u te helpen bij het coderen voor uw specifieke applicatie. Als dit je eerste Arduino -project is, de Arduino -kit Zal je alles bieden wat je nodig hebt, van jumperkabels tot sensoren tot relais en omvat Arduino Uno om je op weg te helpen.

Waarom een Arduino gebruiken om een lineaire actuator te besturen?
Een van de grootste voordelen van het gebruik van een Arduino, of een microcontroller trouwens, om een lineaire actuator Is dat u meer controle hebt over uw lineaire actuator. Met microcontrollers kunt u complexere ingangen van sensoren of andere apparaten gebruiken om uw lineaire actuator te regelen. Hiermee kunt u realtime berekeningen voorafgaan actuator in de ideale positie of implementeer timers om positieveranderingen van uw actuatoren te automatiseren. Microcontrollers kunnen ook feedback van uw actuatoren opnemen om een precieze positie en snelheidscontrole te bieden en meer dan één actuator tegelijk te besturen. Simpel gezegd, microcontrollers bieden u meer controle en flexibiliteit en met Arduino's gemakkelijk te gebruiken ontwerp en brede populariteit, het niveau van extra complexiteit is minimaal.
Controle van een lineaire actuator met een Arduino
U kunt uw lineaire actuator niet rechtstreeks samenwerken met een Arduino zoals je kunt met een schakelaar, omdat de werkspanning van de Arduino slechts 5V is en een zeer kleine stroomlimieten heeft. U moet een tussenliggende component gebruiken om de lineaire actuator te regelen die kan worden gedaan met behulp van relais of een motorrijder.
Relais
Zoals besproken hier, relais zijn elektromagnetische schakelaars die worden geregeld door een spoel te bekrachtigen en te verzenden om de schakelaar te openen en te sluiten. De Arduino kan worden gebruikt om het relais te regelen door de spoel te bekrachtigen en te verergeren met één I/O-pin. Afhankelijk van het type relais dat u gebruikt, verandert hoeveel controle u hebt over uw lineaire actuator, maar interface met de Arduino is vrij eenvoudig, de spoel gewoon bekrachtigen met een I/O -pin. U moet ervoor zorgen dat de nominale spanning van de spoel rond de werkspanning van de Arduino (5V) is of de Arduino niet voldoende kan worden bekrachtigd om de schakelaar te sluiten.
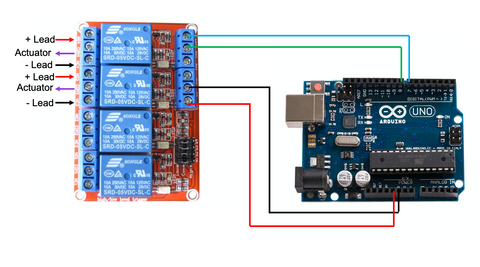
Hierboven is een voorbeeld van een Arduino -interface met een twee SPDT -relaisconfiguratie. In deze configuratie, die hier wordt beschreven, worden de twee relais gebruikt om de polariteit van de spanning naar de lineaire actuator om te draaien en de kracht los te koppelen aan de actuator. In het codevoorbeeld wordt hieronder weergegeven, de Arduino zal het bovenste relais bekrachtigen om de actuator 2 seconden te verlengen door pin 7 op laag in te stellen en vervolgens de actuator 2 seconden te stoppen door het bovenste relais te verduidelijken door beide pinnen op hoog te zetten. Om de actuator in te trekken, zal de Arduino het tweede estafette gedurende 2 seconden bekrachtigen door pin 8 op laag in te stellen en de actuator vervolgens 2 seconden te stoppen door alle pinnen opnieuw in te stellen. Aangezien deze code zich in het gedeelte Loop van het programma bevindt, blijft de Arduino deze code steeds opnieuw herhalen. Uiteraard kunt u een elegantere coderingsoplossing voor uw toepassing implementeren, maar als u op zoek bent naar nog meer controle, wilt u een motorrijder gebruiken.
https://gist.github.com/OMikeGray/6bf644b6cda85bfe8c898ccd44ec6d78
Motor bestuurder
A Motor bestuurder is een geïntegreerd circuitontwerp specifiek om DC -motoren te regelen, die DC -lineaire actuatoren aandrijven. Motorrijders maken gewoonlijk gebruik van een H-brug om zowel richting als snelheidsregeling mogelijk te maken. Hoe u uw Arduino precies kunt verbinden met uw motorrijder, hangt af van de exacte motorrijder, maar heeft ten minste twee I/O -pinnen nodig om dit te doen en een daarvan zal een PWM -signaal zijn. PWM- of pulsbreedtemodulatie is een methode om een signaal te variëren tussen AAN- en UIT-waarden om effectief een lagere dan bedrijfsspanning te leveren. De motorrijder kan dit signaal vervolgens gebruiken om de snelheid aan te passen waarmee de motor loopt.
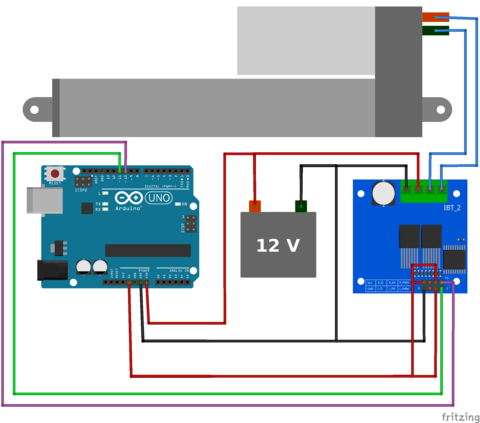
Hierboven is een voorbeeld van onze Hoge stroom DC -motoraandrijving Interfaced met een Arduino. Voor deze motorrijder moet u twee PWM -signalen verzenden, de ene om de actuator en de andere uit te breiden. De PWM wordt gegeven als een niet -ondertekende byte, wat betekent dat het varieert van 0, geen spanning, tot 255, max spanning (5V), die evenredig zal zijn met de snelheid van de motor. Aangezien PWM geen binaire waarde is, moeten we de PWM -pinnen van de Arduino gebruiken en de analoge schrijffunctie gebruiken, zoals te zien in het onderstaande voorbeeld. PWM -pinnen worden op de Arduino aangegeven met een ~ of eenvoudig gemerkt als PWM -pinnen.
https://gist.github.com/OMikeGray/c4e0196704a4d62db5507ad8297708f4
In het bovenstaande codevoorbeeld breidt de Arduino de actuator twee seconden op volle snelheid uit door de motorrijder de volledige 5V uit pin 10 naar de LPWM -pin op de motorrijder te sturen. Vervolgens stopt de Arduino de actuator door geen signaal te sturen naar beide ingangspen van de motorrijder. De Arduino trekt vervolgens de actuator op halve snelheid in door het motorrijdersignaal te verzenden dat half aan en half uit is van pin 11 naar RPWM -pin op de motorrijder. Stopt vervolgens de actuator opnieuw. Aangezien deze code zich in het gedeelte Loop van het programma bevindt, blijft de Arduino deze code steeds opnieuw herhalen. Nogmaals, u kunt een meer elegantcodeeroplossing implementeren die bij uw toepassing past, vooral als u ingangen toevoegt om uw actuator te bedienen.
Inputs toevoegen
Zodra u uw actuator met een Arduino kunt besturen, kunt u vervolgens ingangen in de Arduino implementeren voor meer automatisering en controle. Deze ingangen kunnen zijn schakelaars, een breed scala aan sensoren, of zelfs feedback van de actuator zelf. Aangezien er een breed scala aan opties voor inputs is, zal het implementeren ervan variëren, maar er zijn een paar algemene punten die u moet weten. Als de invoer een binaire ingang biedt, zoals een schakelaar, wilt u gebruik maken van de digitale pinnen op de Arduino, die op het bord of in de datasheet worden gelabeld en gebruik maken van de functie digitalread () in de functie Arduino Ide. Als uw invoerapparaat een analoog signaal biedt, moet u gebruik maken van de analoge pinnen, die op het bord of in de gegevensblad worden gelabeld en gebruik maken van de functie Analogread ().



