「同じ12V電源に配線されていると、アクチュエータが同期して動かないのはなぜですか?」

多くのお客様は、Firgelliリニアアクチュエータを使用して、トラックのハッチカバーの持ち上げを自動化したり、ワインセラーにつながるトラップドアを隠したり、 ランボルギーニのエアブレーキ。これらのプロジェクトを達成するために、ハッチの両側に2つのアクチュエータを配置して持ち上げることができますが、アクチュエータが同じ速度で動かなかったためにハッチが壊れたか、モーターが焼損したことをお客様から通知されることがあります。
どうしたの?幸い、これはリニアアクチュエータの設計上の欠陥ではなく、すべてのDCモーターに固有の特性であると自信を持って言えます。それが私たちのものであろうと競合他社のものであろうと、2つのDCモーター 同期して完全に動くことはありません エンコーダーを使用して、閉じたフィードバックループなしで互いに。
これには、次のような多くの理由がありますが、これらに限定されません。
- 小さな変動を許容する製造公差
- 各モーターシャフトに適用される異なる負荷/トルク
- ブッシング/ベアリング摩擦の変動
- 機械的な摩耗の違い
これらの小さな違いは複合しており、DCモーターまたはリニアアクチュエーターの間で速度に5〜10%の違いがあると予想するのが現実的です。幸い、この固有の速度の違いを克服する方法はいくつかあります。
同じ速度でリニアアクチュエータを実行する方法
購入した(または購入する予定の)場合 フィードバックロッドリニアアクチュエータ, 光フィードバックリニアアクチュエータ, 弾丸シリーズ36Cal、または Bulletシリーズ50Calリニアアクチュエータ、このセクションでは、それらを同期して移動する方法について説明します。
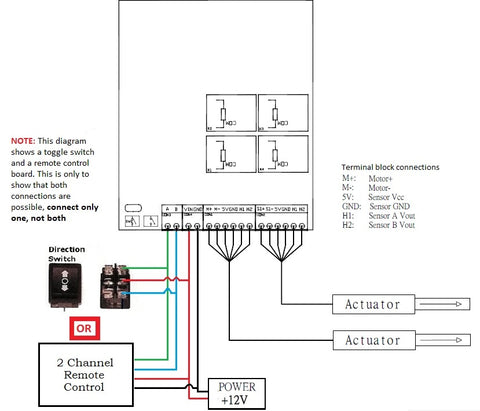
1)FA-SYNC-4またはFA-SYNC-2同期ボックス (強く推奨する)
ザ・ 同期制御ボックス これは、2つから4つのリニアアクチュエータの動きを同期させるための最も信頼性の高い方法です。次のリストからのみ、同じタイプのアクチュエータが必要になります。
- 光学シリーズ200lbアクチュエータ
- 光学シリーズ400lbアクチュエータ
- 12V弾丸シリーズ36Cal。アクチュエータ
- 12V弾丸シリーズ50口径。アクチュエータ
このコントロールボックスは、既成の「プラグアンドプレイ」ソリューションを提供します。配線が完了すると、ボタンを押すだけでシステムが自動キャリブレーションされ、最大4つのアクチュエータを同期して直感的に制御できます。負荷。見る この FA-SYNC-2およびFA-SYNC-4同期制御ボックスの使用方法に関する専用チュートリアル。
2)Arduino割り込みピン
この方法は、OpticalシリーズとBulletシリーズで機能します。これらのアクチュエータには、それぞれ光学エンコーダとホール効果エンコーダがあります。パルス数を数えることにより、ロッドの変位を計算できます。制御アルゴリズムを適用すると、同期制御が可能になります。これには、エンコーダからの信号をArduinoの割り込みピンに接続する必要があります。 これは高度なプロジェクトです。ソフトウェアやプログラミングのサポートは提供していません。
3)Arduinoアナログピン
この方法はでのみ機能します フィードバックロッドリニアアクチュエータ。フィードバックロッドリニアアクチュエータには、読み取りおよび位置読み取りに変換できるアナログ出力を提供するポテンショメータが組み込まれています。 Arduinoを使用してこれを行う方法のチュートリアルがリンクされています ここに;このチュートリアルは徹底的ですが、プログラミングとArduinoの知識があることを前提としています。さらに、このチュートリアルでは、センサーから読み取り値を取得する方法のみを示しています。同期制御用のソフトウェアを作成するのはあなた次第です。 これは高度なプロジェクトです。ソフトウェアやプログラミングのサポートは提供していません。
(ほぼ)同じ速度でリニアアクチュエータを実行する方法
このセクションでは、フィードバック制御用のエンコーダが組み込まれていないリニアアクチュエータを移動する方法について説明します。リニアアクチュエータをまだ購入していない場合は、このセクションをスキップして、位置エンコーダが組み込まれたFirgelliリニアアクチュエータを使用する前のセクションで説明した方法に従うことをお勧めします。ただし、これらの内蔵位置エンコーダがないリニアアクチュエータをすでに購入している場合は、 フィルジェリクラシック または フィルジェリプレミアム リニアアクチュエータでありながら(ほぼ)同じ速度で動かしたい場合は、このセクションを読み続けてください。
注意:閉ループフィードバック制御なしでアクチュエータを正確に同じ速度で動かすことは物理的に不可能であるため、私たちは(ほぼ)同じ速度を言い続けます。
1)何もしない
最も簡単な解決策は、特にアクチュエータのストロークが小さい(<6インチ)場合、速度のわずかな5〜10%の違いについて心配しないことです。これは、高さが大幅に異なることはないためです。代わりに、システムにある程度の柔軟性を導入します。たとえば、2つのアクチュエータを備えたハッチを構築する場合、アクチュエータ速度の違いがシステムによって吸収されるように、ハッチの本体がわずかに回転/ねじれるように設計できます。
2)スピードコントローラー
1つのアクチュエータが2番目のアクチュエータよりも速く動く場合は、 速度制御器 その速度を下げるために高速アクチュエータで。このコントロールボックスは、パルス幅変調(PWM)を使用して、アクチュエータの移動速度を調整します。詳細については、チュートリアルを参照してください。 Firgelliリニアアクチュエータでスピードコントローラを使用する方法。速度の調整は芸術的な形式であり、複数のアクチュエータ間で完全な速度の一致をもたらすことはありませんが、フィードバックを使用しない場合に可能な最良の結果です。
3)Arduino速度制御
既製の速度コントローラーを使用する代わりに、Arduinoを使用してPWM信号を使用してアクチュエーターの速度を変更できます。 Arduinoの経験がない場合は、この方法をお勧めしません。 FirgelliはArduinoやプログラミングのサポートを提供していませんが、概要チュートリアルがあります。 Arduinoとモータードライバーを使用して速度を変更する方法.



