このプロジェクトは、TIVOリモートコントロールとArduinoボードを活用して線形アクチュエーターを操作してテレビをカバーする絵画を持ち上げる方法を示しています。最後にビデオをご覧ください
必要なツール
このプロジェクトを完了するには、次のツールが必要になります。
- #0フィリップスドライバー
- はんだごて
- 半田
- ワイヤーカッター
- 小さなプライヤー(私は小さな電子機器を操作するために設計されたプライヤーを使用しました)
パーツリスト
このプロジェクトを完了するには、次の部分が必要です。
- ヘビーデューティトラックアクチュエーターから Firgelli 自動化
- Tivo Roamioリモートコントロール
- Arduino UNO Rev 3
- ハモンド1591ESBK ABSプロジェクトボックスブラック(7.5” x 4.3” x 2.2”)
- Arduino用のMicrotivity IB171 170ポイントミニブレッドボード
- 赤外線レシーバー2.5〜5.5V 38kHz
- 100pcsマイケルジョシュ20cm m/fジャンパーワイヤーケーブル1ピンプラグオスからメス
- Sainsmart 2チャンネルリレーモジュール
- USB 2.0ケーブル - A-MaleからB-Male
- 4フィートの18/5ブラックスプリンクラーワイヤ
- 8数量#4–40 x 2インチステンレス製の機械ネジ(私はホームデポから購入しました)
- 8 Qty Everbuilt#4–40機械ネジナット(Home Depotから購入しました)
- 16量½インチナイロンスペーサー(ホームデポから購入しました)
- 1回のジップタイ
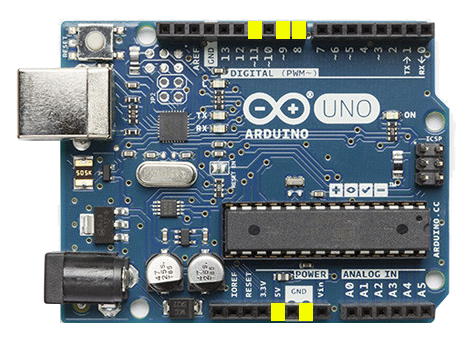
Arduino Uno Rev 3のセットアップ
黄色で強調表示されているArduinoボードの次のピンを使用します。
- パワー5V
- デジタル#8
- デジタル#9
- デジタル#11
- パワーGND
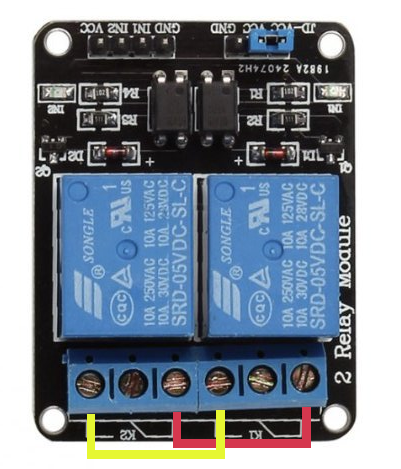
Sainsmart 2チャンネルリレーモジュールのセットアップ
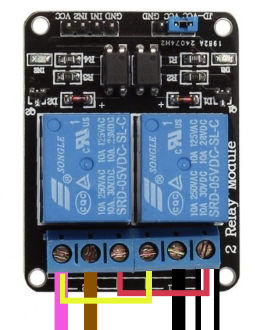
と一致するためには、Sainsmartリレーモジュールをジャンパーする必要があります Firgelli 自動化線形アクチュエータ。 JD-VCCからVCCまでの青いジャンパーがあります。これをそのままにしておきます。
ジャンパーK1位置1からK2位置1
K1リレーの最初の位置からジャンパーワイヤをK2リレーの最初の位置に置きます。ジャンパーは赤で表示されます。

ジャンパーK1位置3からK2位置3
K1リレーの3番目の位置からジャンパーワイヤをK2リレーの3番目の位置に配置します。ジャンパーは黄色で表示されます。

適切にジャンプしたら、次の構成が表示されます。
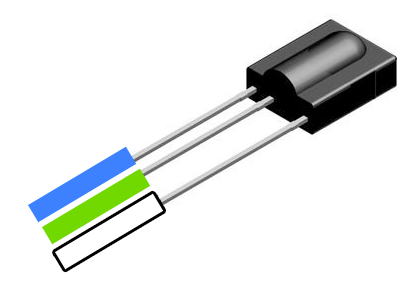
赤外線センサーのセットアップ
赤外線センサーには3つのワイヤがあります。 1つは接地ワイヤー用で、1つは5V電源ワイヤー用で、3つ目はArduinoボードに信号を送信します。
18〜5個のスプリンクラーワイヤに2インチの外側シールドを取り戻し、内部の色のワイヤーを露出させます。緑、白、青のワイヤーのみを使用するので、他のワイヤーを切り落とすので、それらを台無しにする必要はありません。
使用する各ワイヤーの断熱材を除去します。これらは、次の構成を使用してリレーにはんだ付けされます。上からセンサーを見ると、丸い隆起が向いています。
- 青いワイヤーを左端子にはんだ付けします。
- 緑色のワイヤーを中央の端子にはんだ付けします。
- 白いワイヤーを右端子にはんだ付けします。
線形アクチュエーターのワイヤーハーネスをセットアップします
線形アクチュエータには、2つの三角形のボタンを備えた有線リモートコントロールが付属しています。 1つのボタンは、線形アクチュエーターを上に移動するスイッチをアクティブにし、もう1つはそれを下に移動します。
回路基板リモートコントロール本体を取り外します
最初のことは、リモートコントロールの背面にあるワイヤを外すことです。これらは、#0フィリップスドライバーで削除する必要があります。
リモートコントロール本体から回路基板を取り外し、ワイヤーを調べます。下からそれを見ると、ボードにはんだ付けされた4つのワイヤーが必要です。以下に示すように、左から右に黒、白、紫、茶色です。
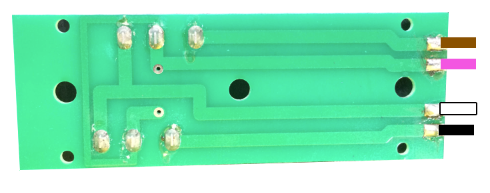
何らかの理由で異なる色を使用した場合は、以下と同じ順序で色を追跡するだけです。
ワイヤーが売られていません
はんだ鉄を使用して、回路基板からワイヤを取り外します。はんだ鉄の先端をはんだポイントの既存のはんだにそっと押して、それを緩め、小さなペアのペアを使用してはんだポイントからワイヤーをそっと引き出します。
リレーにワイヤを取り付けます
次に、有線リモートコントロールからワイヤーをSainsmart 2チャンネルリレーに取り付けます。 #0フィリップスドライバーを使用して端子を外し、締めて締めてワイヤーを固定します。
- 白いワイヤーはK1位置1に入ります
- 黒いワイヤーはK1位置2に入ります
- 茶色のワイヤーはK2位置2に入ります
- 紫色のワイヤーはK2位置3に入ります
注:既存のジャンパーワイヤを取り外さないでください。端子をねじ込んだときは、それらを残します。
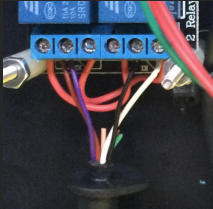
完了したら、上記の画像のように見えるはずです。
ブレッドボードを配線します
次に、Arduinoボードをブレッドボードに配線します。ブレッドボードにより、Arduinoまたはリレーの1つの端子に複数の接続が行われているジャンパー接続が可能になります。
穴の各列が一緒に接続されているため、その列のすべてをジャンパーにすることができます。これが私たちが配線する必要があるアイテムを紹介します。
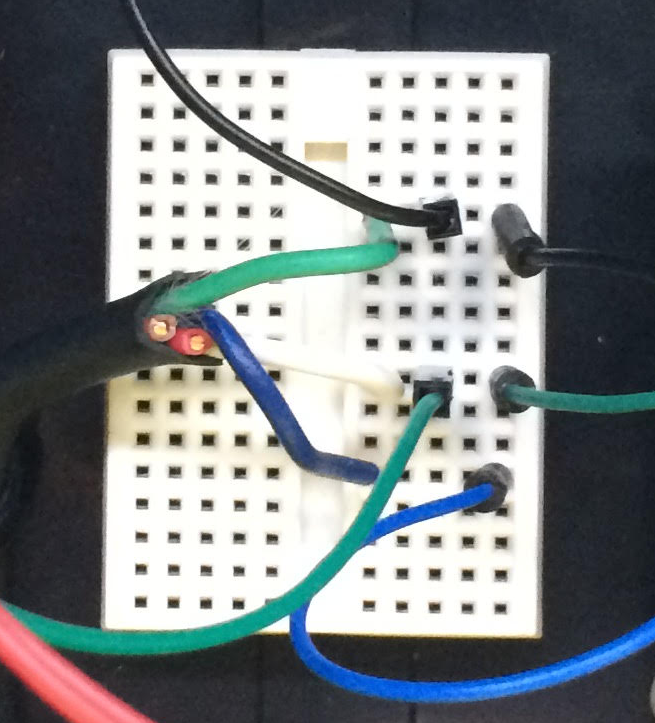
5Vパワー
- ArduinoのPower 5V端子からブレッドボードの未使用の列まで、男性と女性のジャンパーワイヤーを使用します。列の穴に押し込みます。
- ブレッドボードの同じ列からSainsmart 2チャネルリレーのVCC端末まで男性と女性のジャンパーワイヤーを使用します。同じ列の穴に押し込みます。
- 18〜5スプリンクラーワイヤの反対側から白いワイヤーの¼インチを露出させます。同じ列の穴に押し込みます。
地面
- ArduinoのPower GNDターミナルからブレッドボードの未使用の列まで男性と女性のジャンパーワイヤーを使用します。列の穴に押し込みます。
- 他のGNDワイヤと同じ列の穴にSainsmart 2チャンネルリレーのGNDターミナルから男性と女性のジャンパーワイヤーを使用します。同じ列の穴に押し込みます。
- 18〜5スプリンクラーワイヤの反対側から緑のワイヤの¼インチを露出させます。同じ列の穴に押し込みます。
シグナリング
- Arduinoのデジタル#11ターミナルからブレッドボードの未使用の列まで、男性と女性のジャンパーワイヤーを使用します。列の穴に押し込みます。
- 18〜5スプリンクラーワイヤの反対側から青いワイヤーの¼インチを露出させます。同じ列の穴に押し込みます。
完了したら、ブレッドボードは次の画像のように見えるはずです。
Arduinoにコントロールプログラムをインストールします
ダウンロードしてインストールする必要があります Arduino ide。 IDEをダウンロードしてインストールしたら、IDEを開きます。
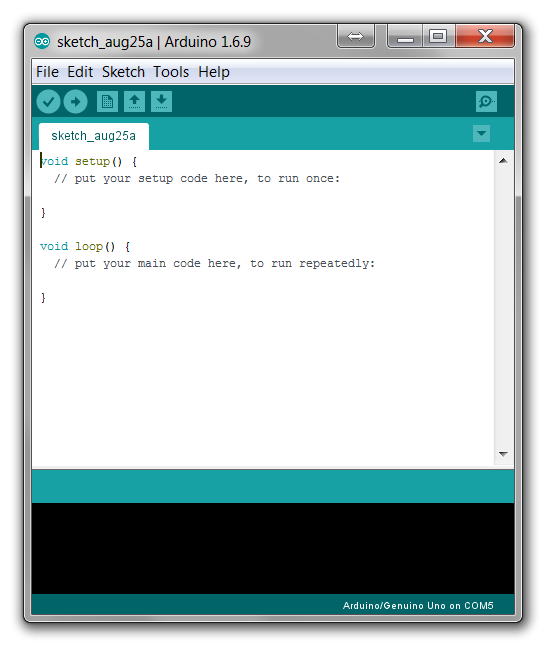
コードをコピーしてIDEに貼り付けます
ソースコードをダウンロードまたはコピーします github そして、それをIDEのウィンドウに貼り付けます。
Irremote.cppファイルを調整します
c:\プログラムファイル(x86)\ arduino \ briberries \ robotirremote \ src \ディレクトリにファイルがあります。 Notepadのような単純なテキストエディターでIrremotetools.cppファイルを開き、次の行を変更します。
5行目は次のように見えます。
int recv_pin = tkd2; // IRレシーバーが接続されているピン
次のように変更して、ファイルを保存します。
int recv_pin = 11; // IRレシーバーが接続されているピン
USBケーブルを使用して、Arduinoをコンピューターに接続します
Arduino、ブレッドボード、リレーボードを、木製デスクなどの非導電性表面に置きます。
USBケーブルの長方形側をコンピューターに接続し、「D」側をArduinoボードに接続します。
ポートを選択します
ツール - ポートメニュー項目を選択し、Arduinoボードを表示するものを選択します。
コードをアップロードします
スケッチを選択します - メニュー項目をアップロードして、コードをArduinoにアップロードします。
コードをテストします
コードがアップロードされたら、からのワイヤーハーネスをプラグ Firgelli 自動化線形アクチュエーターはアクチュエーターに戻り、アクチュエータを接続します。
ArduinoボードをUSBケーブルを介してコンピューターに接続しておきます。
Tivoリモコンを赤外線センサーに向け、緑色の親指の「いいね」ボタンをクリックします。アクチュエータは上に移動する必要があります。
赤外線センサーでTIVOリモートコントロールをポイントし、赤い親指の「嫌悪」ボタンをクリックします。アクチュエータは下に移動する必要があります。
すべてを箱に入れます
ハモンドプロジェクトボックスを使用して、ネジ、スペーサー、機械ネジナットを使用して、回路基板を収容しました。はんだ鉄のポイントチップを使用して、黒いプラスチックの箱に穴を開け、側面を通るワイヤーのためのスペースを作りました。私はジップタイを使用して、赤外線センサーのワイヤーを引き出さないようにしました。のコントロールワイヤ Firgelli 自動化線形アクチュエータ それらが引き出されないように設計されたゴムを用意して、私はそれを活用することができました。
著者について
Richard Bagdonasは、販売ポイント、電子健康記録、顧客関係管理、倉庫管理システムとの統合経験を15年以上統合したデータ統合の専門家です。リチャードは子供の頃から電子機器をいじくり回してきました。これは彼の最初のArduinoプロジェクトです。
リチャードは現在、MI7の主要なヘルスケアアーキテクトであり、同社の電子健康記録システムとの統合を監督しています。



