Potenziometri
I potenziometri, che sono resistori variabili, sono utilizzati in attuatori lineari per fornire una base di feedback posizionale su come cambia la loro resistenza. Attuatori lineari che usano potenziometri per il feedback, come il nostro Attuatore lineare della canna di feedback, consisteranno in 3 fili aggiuntivi come mostrato di seguito, filo 1 per la tensione di ingresso, il filo 2 è il variabile resistenza e filo 3 è per terra. È possibile leggere l'uscita dei potenziometri misurando la tensione tra il filo 2, l'uscita e il terreno, che fornirà un'indicazione della posizione assoluta dell'attuatore lineare. Per utilizzare questo feedback, dovrai utilizzare un qualche tipo di microcontrollore, come un Arduino, per leggere questo valore posizionale mentre l'attuatore si muove.

Feedback posizionale da un potenziometro
Man mano che la resistenza variabile del potenziometro cambia man mano che l'attuatore lineare si muove, la differenza di tensione tra il filo 2 e il terreno cambierà. Per questo motivo, il feedback può essere facilmente gestito nel software di un controller, come un Arduino, poiché è possibile confrontare semplicemente la tensione di uscita del filo 2 a terra. Usando un Arduino, questo può essere semplicemente eseguito utilizzando un analogico in pin di un microcontrollore e usando la funzione Analogread () per leggere la tensione dal filo 2. Viene mostrato un esempio di come collegare un Arduino a un attuatore lineare con feedback potenziometro sotto.

L'analogo nei pin del Arduino sono convertitori da analogico a digitale (ADC), che convertiranno la tensione analogica sul filo 2 a un valore ADC a 10 bit che sarà compreso tra 0 e 1023. Un valore ADC a 10 bit significa che il converter traducerà il segnale analogico in 2^10 o 1024 valori distinti che vanno da 0 a 1023. Non tutti i microcontrollori sono ADC a 10 bit, alcuni sono a 8 bit o 16 bit e maggiore è il numero di bit maggiore è la risoluzione dell'ADC. Dopo aver convertito il segnale analogico in un valore digitale, per determinare un valore di posizione in termini di lunghezza della corsa, come in pollici, dovrai trovare l'esatto intervallo analogico del tuo particolare attuatore lineare in quanto potrebbe non variare da 0 a 1023. Ciò è dovuto al cambio all'interno dell'attuatore che impedisce al potenziometro che ruota completamente al limite e significa che dovrai determinare questo intervallo manualmente. Per l'esempio di codifica di seguito, il Attuatore lineare di feedback della lunghezza da 4 "Attuatore lineare aveva un valore analogico di 44 a 0 "e un valore analogico di 951 a 4". Utilizzando questi valori, è possibile utilizzare rapporti per determinare il valore della lunghezza della corsa come sotto:

Questo può essere semplificato in lunghezza della corsa = 0,00441*(valore analogico - 44), come nell'esempio di codifica seguente. Quante volte leggi questo valore analogico nel codice del microcontrollore è un'altra considerazione importante. Nell'esempio del codice seguente, Arduino legge il potenziometro e aggiorna il valore della posizione fintanto che l'attuatore si sta muovendo. Ma potresti anche utilizzare i timer interni per aggiornare il valore di posizione in un intervallo di tempo impostato o è possibile semplicemente posizionare la funzione di lettura del potenziometro all'interno del ciclo principale del codice e aggiornare continuamente il valore di posizione. Sebbene quest'ultimo non sia consigliato se si prevede di utilizzare il controller per eseguire più funzioni individuali.
https://gist.github.com/OMikeGray/4dec9e075a8fe41efaea001fa1e98d70
Affrontare il rumore elettrico
Uno svantaggio del feedback dal potenziometro è che può essere influenzato dal rumore elettrico e può rendere instabile il tuo valore posizionale. Un modo per superare questo è utilizzare un filtro digitale per rimuovere il rumore elettrico e ottenere risultati stabili. Esistono diversi tipi di filtri che possono essere utilizzati dai filtri esponenziali ai filtri passa-passa-banda ciascuno con i propri benefici, ma per molte applicazioni con attuatori lineari, semplicemente utilizzando una media in esecuzione del valore posizionale funzionerà. Una media in esecuzione è semplicemente la media dell'ultima quantità X di misurazioni per appianare il segnale di ingresso. Il numero esatto di misurazioni che si desidera in media dipenderà dalla tua applicazione e potrebbe essere necessario giocare con questo numero per determinare cosa funziona meglio. Alcune cose di cui essere consapevoli, se hai troppo poche misurazioni nella media, il tuo segnale sarà comunque rumoroso, ma se hai troppe misurazioni, i tuoi risultati rimarranno troppo indietro rispetto alla posizione effettiva dell'attuatore per essere utilizzabili. Sta trovando un equilibrio tra troppo poche e troppe misurazioni che renderà efficace il filtro. Di seguito è riportato un diagramma che mostra l'effetto di un filtro medio in esecuzione rispetto al segnale di ingresso effettivo.
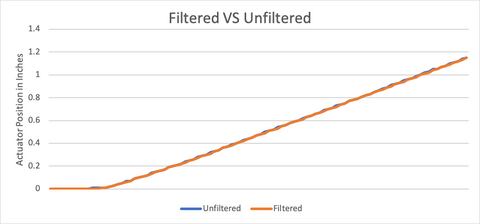
Il codice utilizzato per implementare la media in esecuzione è mostrato di seguito, utilizza una media di 3 misurazioni per appianare il segnale di ingresso. Sono state scelte tre misurazioni perché non c'era molto rumore nel segnale di ingresso reale, quindi erano necessarie solo alcune misurazioni per appianare il valore. Se ci fosse più rumore nel segnale di ingresso, sarebbe necessario un numero maggiore di misurazioni. In situazioni in cui ci sono molti componenti induttivi (cioè motori) il rumore elettrico sarà un problema molto più grande.
https://gist.github.com/OMikeGray/b13f156c080a100a89e5bbd541d0565e
Utilizzo di feedback per l'automazione
La cosa grandiosa dell'implementazione del feedback nel tuo design è che ti consente di creare un sistema auto-accumulato che sappia dove essere per un determinato input. Per utilizzare il feedback del potenziometro in un sistema automatizzato puoi semplicemente confrontare il tuo desiderio di lunghezza della tua attuatore lineare con la posizione effettiva che è data dal potenziometro. Quindi devi semplicemente dire al tuo attuatore di estendere o ritrarre di conseguenza. Sebbene l'utilizzo del feedback del potenziometro in un sistema automatizzato abbia alcuni problemi che potresti dover superare. Uno è il problema del rumore elettrico, che è stato discusso sopra, l'altro è essere in grado di ottenere risultati ripetibili. Poiché i potenziometri generalmente non sono così sensibili ai movimenti più piccoli dell'attuatore lineare, rispetto alle altre opzioni di feedback, ciò rende più difficile il raggiungimento di risultati ripetibili precisi. In pratica, ciò significa che avrai un margine di errore attorno alla posizione desiderata, che può essere accettabile per la tua applicazione data. Se non hai bisogno di posizionamenti molto precisi o stai sostituendo un interruttore manuale con un microcontrollore per automatizzare il sistema, il feedback posizionale da un potenziometro sarà abbastanza accurato per te. Se hai bisogno di un posizionamento accurato dal tuo attuatore lineare, potrebbe essere necessario considerare Altre opzioni di feedback Per l'attuatore lineare o aggiungi ulteriori componenti per fornire risultati più affidabili. Questi componenti includono sensori o interruttori di limite esterni che può darti un migliore indicatore di posizione assoluta.

Non essere in grado di ottenere risultati ripetibili è anche un problema quando si controlla più attuatori lineari. Poiché il segnale di uscita del potenziometro è facilmente influenzato dal rumore elettrico, incluso il rumore elettrico degli altri attuatori, e dipende dalla tensione di ingresso al potenziometro, garantendo che più attuatori lineari si muovono simultaneamente può essere impegnativo. L'utilizzo di filtri digitali, garantendo una tensione di ingresso stabile al potenziometro e far scappare i fili del segnale di uscita da altri componenti induttivi contribuiranno a garantire risultati più ripetibili. Anche se, se vuoi eseguire più attuatori contemporaneamente, potrebbe essere meglio controllare il Altre opzioni di feedback per attuatori lineari.



