Potentiomètres
Les potentiomètres, qui sont des résistances variables, sont utilisés dans les actionneurs linéaires pour fournir une base de rétroaction de position sur la façon dont leur résistance change. Actionneurs linéaires qui utilisent des potentiomètres pour des commentaires, comme notre Actuator linéaire de la tige de rétroaction, sera composé des 3 fils supplémentaires comme indiqué ci-dessous, fil 1 pour la tension d'entrée, le fil 2 est le variable résistance et fil 3 est pour la masse. Vous pouvez lire la sortie des potentiomètres en mesurant la tension entre le fil 2, la sortie et la masse, qui fournira une indication de la position absolue de l'actionneur linéaire. Pour utiliser ces commentaires, vous devrez utiliser un certain type de microcontrôleur, comme un Arduino, pour lire cette valeur positionnelle au fur et à mesure que l'actionneur se déplace.

Rétroaction positionnelle d'un potentiomètre
À mesure que la résistance variable du potentiomètre change à mesure que l'actionneur linéaire se déplace, la différence de tension entre le fil 2 et la terre changera. Pour cette raison, la rétroaction peut facilement être gérée dans le logiciel d'un contrôleur, comme un Arduino, car vous pouvez simplement comparer la tension de sortie du fil 2 à la terre. À l'aide d'un arduino, cela peut simplement être fait en utilisant un analogue dans la broche d'un microcontrôleur et en utilisant la fonction analogread () pour lire la tension à partir de fil 2. Un exemple de la façon de connecter un arduino à un actionneur linéaire avec un rétroaction du potentiomètre est affiché ci-dessous.

L'analogue dans les broches du Arduino sont des convertisseurs analogiques-numériques (ADC), qui convertiront la tension analogique sur le fil 2 en une valeur ADC 10 bits qui sera comprise entre 0 et 1023. Une valeur ADC 10 bits signifie que le convertisseur traduira le signal analogique en 2 ^ 10 ou 1024 valeurs distinctes allant de 0 à 1023. Tous les microcontrôleurs ne sont pas ADC 10 bits, certains sont 8 bits ou 16 bits, et plus le nombre de bits est élevé, plus la résolution de l'ADC est élevée. Une fois que vous avez converti le signal analogique en une valeur numérique, pour déterminer une valeur de position en termes de longueur de course, comme en pouces, vous devrez trouver la plage analogique exacte de votre actionneur linéaire particulier car il peut ne pas aller de 0 à 1023. En effet, la boîte de vitesses à l'intérieur de l'actionneur empêchant le potentiomètre en rotation entièrement à sa limite et signifie que vous devrez déterminer cette gamme manuellement. Pour l'exemple de codage ci-dessous, le ACTUATEUR DE RÉPARATION DE RÉPARAGE DE LONGUEUR DE 4 ” avait une valeur analogique de 44 à 0 ”et une valeur analogique de 951 à 4”. En utilisant ces valeurs, vous pouvez utiliser des rapports pour déterminer la valeur de longueur de trait comme ci-dessous:

Cela peut être simplifié en longueur de course = 0,00441 * (valeur analogique - 44), comme dans l'exemple de codage ci-dessous. À quelle fréquence vous lisez cette valeur analogique dans le code de votre microcontrôleur est une autre considération importante. Dans l'exemple de code ci-dessous, l'Arduino lit le potentiomètre et met à jour la valeur de position tant que l'actionneur se déplace. Mais vous pouvez également utiliser les minuteries internes pour mettre à jour la valeur de position sur un intervalle de temps défini ou vous pouvez simplement placer la fonction de lecture du potentiomètre à l'intérieur de la boucle principale du code et mettre à jour en continu la valeur de position. Bien que ce dernier ne soit pas recommandé si vous prévoyez d'utiliser votre contrôleur pour effectuer plusieurs fonctions individuelles.
https://gist.github.com/OMikeGray/4dec9e075a8fe41efaea001fa1e98d70
Faire face au bruit électrique
Un inconvénient des commentaires du potentiomètre est qu'il peut être affecté par le bruit électrique et peut rendre votre valeur de position instable. Une façon de surmonter cela consiste à utiliser un filtre numérique pour éliminer le bruit électrique et obtenir des résultats stables. Il existe peu de types de filtres qui peuvent être utilisés des filtres exponentiels aux filtres passe-haut et passe-bande chacun avec leurs propres avantages, mais pour de nombreuses applications avec des actionneurs linéaires, simplement en utilisant une moyenne de fonctionnement de la valeur de position fonctionnera. Une moyenne de course est simplement la moyenne de la dernière quantité de mesures pour lisser le signal d'entrée. Le nombre exact de mesures que vous souhaitez en moyenne dépendra de votre application et vous devrez peut-être jouer avec ce nombre pour déterminer ce qui fonctionne le mieux. Quelques choses à savoir, si vous avez trop peu de mesures dans votre moyenne, votre signal sera toujours bruyant, mais si vous avez trop de mesures, vos résultats seront trop en retard de la position réelle de l'actionneur pour être utilisable. Il s'agit d'un équilibre entre trop peu et trop de mesures qui rendront votre filtre efficace. Vous trouverez ci-dessous un tracé montrant l'effet d'un filtre moyen en cours d'exécution par rapport au signal d'entrée réel.
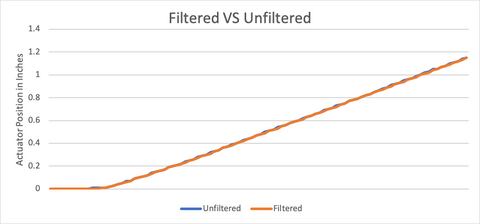
Le code utilisé pour implémenter la moyenne en cours d'exécution est illustré ci-dessous, il utilise une moyenne de 3 mesures pour lisser le signal d'entrée. Trois mesures ont été choisies car il n'y avait pas beaucoup de bruit dans le signal d'entrée réel, donc seules quelques mesures étaient nécessaires pour lisser la valeur. S'il y avait plus de bruit dans le signal d'entrée, un plus grand nombre de mesures serait nécessaire. Dans les situations où il y a beaucoup de composants inductifs (c'est-à-dire les moteurs) que le bruit électrique sera un problème beaucoup plus important.
https://gist.github.com/OMikeGray/b13f156c080a100a89e5bbd541d0565e
Utilisation des commentaires pour l'automatisation
La grande chose à propos de la mise en œuvre des commentaires sur votre conception est qu'elle vous permet de créer un système auto-automatisé qui sait où être pour une entrée donnée. Pour utiliser le rétroaction du potentiomètre dans un système automatisé, vous pouvez simplement comparer votre longueur étendue de votre désir de votre actionneur linéaire à la position réelle donnée par le potentiomètre. Ensuite, vous devez simplement dire à votre actionneur d'étendre ou de se retirer en conséquence. Bien que l'utilisation des commentaires du potentiomètre dans un système automatisé ait quelques problèmes que vous devrez peut-être surmonter. L'un est la question du bruit électrique, qui a été discuté ci-dessus, l'autre est en mesure d'obtenir des résultats reproductibles. Comme les potentiomètres ne sont généralement pas aussi sensibles aux mouvements plus petits de l'actionneur linéaire, par rapport aux autres options de rétroaction, cela rend les résultats reproductibles précis plus difficiles. En pratique, cela signifie que vous aurez une marge d'erreur autour de votre position souhaitée, qui peut être acceptable pour votre application donnée. Si vous n'avez pas besoin de positionnement très précis ou remplacez un commutateur manuel par un microcontrôleur pour automatiser votre système, les commentaires de position d'un potentiomètre seront suffisamment précis pour vous. Si vous avez besoin de positionnement précis de votre actionneur linéaire, vous devrez peut-être envisager Autres options de rétroaction Pour votre actionneur linéaire ou ajoutez des composants supplémentaires pour fournir des résultats plus fiables. Ces composants comprennent des capteurs ou interrupteurs de limites externes ce qui peut vous donner un meilleur indicateur de position absolue.

Ne pas pouvoir obtenir des résultats reproductibles est également un problème lorsque vous contrôlez plusieurs actionneurs linéaires. Comme le signal de sortie du potentiomètre est facilement affecté par le bruit électrique, y compris le bruit électrique des autres actionneurs, et dépend de la tension d'entrée vers le potentiomètre, garantissant que plusieurs actionneurs linéaires se déplacent simultanément peuvent être difficiles. L'utilisation de filtres numériques, garantissant une tension d'entrée stable au potentiomètre, et le fait que les fils de signal de sortie s'éloignent d'autres composants inductifs contribueront tous à garantir des résultats plus reproductibles. Bien que, si vous souhaitez exécuter plusieurs actionneurs simultanément, il pourrait être préférable de consulter le Autres options de rétroaction pour les actionneurs linéaires.



