Potenciómetros
Los potenciómetros, que son resistencias variables, se utilizan en actuadores lineales para proporcionar una base de retroalimentación posicional sobre cómo cambia su resistencia. Actuadores lineales que usan potenciómetros para comentarios, como nuestro Varilla de retroalimentación actuador lineal, consistirán en los 3 cables adicionales como se muestra a continuación, cable 1 para el voltaje de entrada, el cable 2 es el variable resistencia, y el cable 3 es para tierra. Puede leer la salida de los potenciómetros midiendo el voltaje entre el cable 2, la salida y la tierra, lo que proporcionará una indicación de la posición absoluta del actuador lineal. Para utilizar estos comentarios, deberá utilizar algún tipo de microcontrolador, como un Arduino, para leer este valor posicional a medida que se mueve el actuador.

Retroalimentación posicional de un potenciómetro
A medida que la resistencia variable del potenciómetro cambia a medida que el actuador lineal se mueve, la diferencia de voltaje entre el cable 2 y la tierra cambiará. Debido a esto, la retroalimentación se puede manejar fácilmente en el software de un controlador, como un Arduino, ya que simplemente puede comparar el voltaje de salida del cable 2 a la tierra. Usando un arduino, esto se puede hacer simplemente utilizando un análogo en el pin de un microcontrolador y utilizando la función analogread () para leer el voltaje del cable 2. Se muestra un ejemplo de cómo conectar un arduino a un actuador lineal con retroalimentación del potenciómetro abajo.

El análogo en alfileres del Arduino son convertidores analógicos a digitales (ADC), que convertirán el voltaje analógico en el cable 2 a un valor ADC de 10 bits que será entre 0 y 1023. Un valor ADC de 10 bits significa que el convertidor traducirá la señal analógica en 2^10 o 1024 valores distintos que van de 0 a 1023. No todos los microcontroladores son ADC de 10 bits, algunos son de 8 bits de 8 o 16 bits, y cuanto mayor sea el número de bits, mayor es la resolución del ADC. Una vez que haya convertido la señal analógica en un valor digital, para determinar un valor de posición en términos de longitud de carrera, como en pulgadas, deberá encontrar el rango analógico exacto de su actuador lineal particular, ya que puede no variar de 0 a 1023. Esto se debe a la caja de cambios dentro del actuador que evita que el potenciómetro gire por completo a su límite y significa que deberá determinar este rango manualmente. Para el ejemplo de codificación a continuación, el 4 "longitud de carrera de retroalimentación de retroalimentación actuador lineal tenía un valor analógico de 44 a 0 "y un valor analógico de 951 a 4". Usando estos valores, puede usar relaciones para determinar el valor de longitud de carrera como a continuación:

Esto se puede simplificar en la longitud de la carrera = 0.00441*(valor analógico - 44), como en el ejemplo de codificación a continuación. Con qué frecuencia lee este valor analógico en el código de su microcontrolador es otra consideración importante. En el ejemplo de código a continuación, el Arduino lee el potenciómetro y actualiza el valor de posición siempre que el actuador se mueva. Pero también puede utilizar los temporizadores internos para actualizar el valor de posición durante un intervalo de tiempo establecido o simplemente puede colocar la función de lectura del potenciómetro dentro del bucle principal del código y actualizar continuamente el valor de posición. Aunque no se recomienda este último si planea usar su controlador para realizar múltiples funciones individuales.
https://gist.github.com/OMikeGray/4dec9e075a8fe41efaea001fa1e98d70
Lidiar con el ruido eléctrico
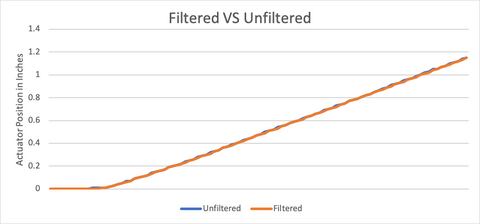
Un inconveniente de la retroalimentación del potenciómetro es que puede verse afectado por el ruido eléctrico y puede hacer que su valor posicional sea inestable. Una forma de superar esto es usar un filtro digital para eliminar el ruido eléctrico y lograr resultados estables. Hay pocos tipos diferentes de filtros que se pueden usar desde filtros exponenciales hasta filtros de paso alto y paso de banda, cada uno con sus propios beneficios, pero para muchas aplicaciones con actuadores lineales, simplemente usar un promedio de ejecución del valor posicional funcionará. Un promedio de ejecución es simplemente el promedio de la última x cantidad de mediciones para suavizar la señal de entrada. El número exacto de medidas que desea promediar dependerá de su aplicación y es posible que deba jugar con este número para determinar qué funciona mejor. Algunas cosas a tener en cuenta, si tiene muy pocas medidas en su promedio, su señal seguirá siendo ruidosa, pero si tiene demasiadas medidas, sus resultados se retrasarán demasiado detrás de la posición real del actuador para ser utilizable. Está encontrando un equilibrio entre muy pocas y demasiadas medidas que harán que su filtro sea efectivo. A continuación se muestra una gráfica que muestra el efecto de un filtro promedio de ejecución versus la señal de entrada real.
El código utilizado para implementar el promedio de ejecución se muestra a continuación, utiliza un promedio de 3 mediciones para suavizar la señal de entrada. Se eligieron tres mediciones porque no había mucho ruido en la señal de entrada real, por lo que solo se necesitaban unas pocas mediciones para suavizar el valor. Si hubiera más ruido en la señal de entrada, se necesitaría un mayor número de mediciones. En situaciones en las que hay muchos componentes inductivos (es decir, motores), el ruido eléctrico será un problema mucho mayor.
https://gist.github.com/OMikeGray/b13f156c080a100a89e5bbd541d0565e
Utilizando comentarios para la automatización
Lo mejor de la implementación de comentarios en su diseño es que le permite crear un sistema autoautomado que sepa dónde estar para una entrada dada. Para utilizar la retroalimentación del potenciómetro en un sistema automatizado, simplemente puede comparar su deseo de longitud extendida de su actuador lineal con la posición real que el potenciómetro proporciona. Entonces simplemente necesita decirle a su actuador que se extienda o se retraiga en consecuencia. Aunque utilizar la retroalimentación del potenciómetro en un sistema automatizado tiene algunos problemas que es posible que deba superar. Uno es el tema del ruido eléctrico, que se discutió anteriormente, el otro es poder lograr resultados repetibles. Como los potenciómetros generalmente no son tan sensibles a los movimientos más pequeños del actuador lineal, en comparación con las otras opciones de retroalimentación, esto dificulta el logro de resultados repetibles precisos. En la práctica, esto significa que tendrá un margen de error en torno a su posición deseada, que puede ser aceptable para su solicitud dada. Si no necesita posicionamientos muy precisos o reemplaza un interruptor manual con un microcontrolador para automatizar su sistema, la retroalimentación posicional de un potenciómetro será lo suficientemente preciso para usted. Si necesita un posicionamiento preciso de su actuador lineal, es posible que deba considerar Otras opciones de comentarios para su actuador lineal o agregue componentes adicionales para proporcionar resultados más confiables. Estos componentes incluyen sensores o interruptores de límite externos lo que puede darle un mejor indicador de posición absoluta.

No poder lograr resultados repetibles también es un problema cuando controla múltiples actuadores lineales. Como la señal de salida del potenciómetro se ve fácilmente afectada por el ruido eléctrico, incluido el ruido eléctrico de los otros actuadores, y depende del voltaje de entrada al potenciómetro, asegurando que múltiples actuadores lineales se muevan simultáneamente puede ser desafiante. Utilizando filtros digitales, garantizar un voltaje de entrada estable al potenciómetro y hacer que los cables de señal de salida se escapen de otros componentes inductivos ayudará a garantizar resultados más repetibles. Aunque, si desea ejecutar múltiples actuadores simultáneamente, podría ser mejor consultar el Otras opciones de comentarios para actuadores lineales.



