Potensiometers
Potensiometers, wat veranderlike weerstande is, word in lineêre aktueerders gebruik om posisionele terugvoerbasis te gee oor hoe hul weerstand verander. Lineêre aktueerders wat potensiometers gebruik vir terugvoer, soos ons Terugvoerstaaf lineêre aktuator, sal bestaan uit die 3 bykomende drade soos hieronder getoon, draad 1 vir die insetspanning, draad 2 is die veranderlik Weerstand, en draad 3 is vir grond. U kan die uitset van die potensiometers lees deur die spanning tussen draad 2, die uitset en grond te meet, wat 'n aanduiding sal gee van die absolute posisie van die lineêre aktuator. Om hierdie terugvoer te gebruik, moet u van 'n soort mikrobeheerder gebruik maak, soos 'n Arduino, om hierdie posisionele waarde te lees soos die aktuator beweeg.

Posisionele terugvoer van 'n potensiometer
Namate die veranderlike weerstand van die potensiometer verander namate die lineêre aktuator beweeg, sal die spanningsverskil tussen draad 2 en grond verander. As gevolg hiervan kan die terugvoer maklik in die sagteware van 'n beheerder, soos 'n Arduino, hanteer word, aangesien u eenvoudig die uitsetspanning van draad 2 met die grond kan vergelyk. Met behulp van 'n arduino kan dit eenvoudig gedoen word deur 'n analoog in 'n mikrobeheerder te gebruik en die analogread () -funksie te gebruik om die spanning van draad te lees 2. 'N Voorbeeld van hoe om 'n arduino aan te sluit aan 'n lineêre aktuator met 'n potensiometer -terugvoer word getoon onder.

Die analoog in penne van die Arduino is analoog-tot-digitale omskakelaars (ADC), wat die analoogspanning op draad 2 sal omskakel na 'n 10-bis ADC-waarde wat tussen 0 en 1023 sal wees. 'N 10-bis ADC-waarde beteken 2^10 of 1024 verskillende waardes wat wissel van 0 tot 1023. Nie alle mikrobeheerders is 10-bis ADC nie, sommige is 8-bis of 16-bis, en hoe groter die aantal stukkies, hoe groter is die resolusie van die ADC. Sodra u die analoogsein in 'n digitale waarde omgeskakel het, om 'n posisiewaarde in terme van die lengte van die beroerte te bepaal, soos in duim, moet u die presiese analoog -reeks van u spesifieke lineêre aktuator vind, aangesien dit nie van 0 tot wissel nie 1023. Dit is as gevolg van die ratkas in die aktuator wat voorkom dat die potensiometer ten volle tot sy limiet draai en beteken dat u hierdie reeks met die hand moet bepaal. Vir die onderstaande kodering, die 4 ”Slaglengte -terugvoerstaaf Lineêre aktuator het 'n analoogwaarde van 44 by 0 ”en 'n analoogwaarde van 951 by 4”. Met behulp van hierdie waardes, kan u verhoudings gebruik om die strepenlengtewaarde soos hieronder te bepaal:

Dit kan vereenvoudig word in beroerte lengte = 0.00441*(analoogwaarde - 44), soos in die koderingsvoorbeeld hieronder. Hoe gereeld u hierdie analoogwaarde in die kode van u mikrobeheerder lees, is nog 'n belangrike oorweging. In die kode -voorbeeld hieronder lees die Arduino die potensiometer en werk die posisiewaarde op solank die aktuator beweeg. Maar u kan ook gebruik maak van interne timers om die posisiewaarde oor 'n vasgestelde tydsinterval op te dateer, of u kan eenvoudig die potensiometer -leesfunksie binne -in die hooflus van die kode plaas en die posisiewaarde deurlopend opdateer. Alhoewel laasgenoemde nie aanbeveel word as u van plan is om u beheerder te gebruik om verskeie individuele funksies uit te voer nie.
https://gist.github.com/OMikeGray/4dec9e075a8fe41efaea001fa1e98d70
Die hantering van elektriese geraas
Een nadeel van die terugvoer van die potensiometer is dat dit deur elektriese geraas beïnvloed kan word en dat u posisionele waarde onstabiel kan maak. Een manier om dit te oorkom, is om 'n digitale filter te gebruik om die elektriese geraas te verwyder en stabiele resultate te bereik. Daar is min verskillende soorte filters wat gebruik kan word van eksponensiële filters tot hoë-pass- en banddeurlaatfilters elk met hul eie voordele, maar vir baie toepassings met lineêre aktuators, sal die gebruik van 'n lopende gemiddelde van die posisionele waarde werk. 'N Loopgemiddelde is eenvoudig die gemiddelde van die laaste X -hoeveelheid metings om die insetsein glad te maak. Die presiese aantal metings wat u gemiddeld wil hê, sal van u aansoek afhang, en u moet moontlik met hierdie nommer speel om te bepaal wat die beste werk. 'N Paar dinge om van bewus te wees, as u te min metings in u gemiddelde het, sal u sein steeds lawaaierig wees, maar as u te veel metings het, sal u resultate te ver agter die werklike posisie van die aktuator bly om bruikbaar te wees. Dit vind 'n balans tussen te min en te veel metings wat u filter effektief sal maak. Hieronder is 'n plot wat die effek van 'n lopende gemiddelde filter teenoor die werklike insetsein toon.
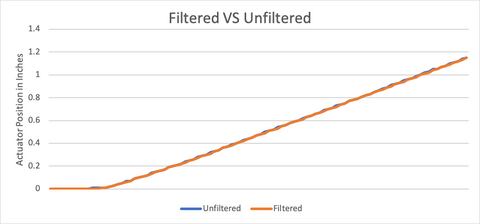
Die kode wat gebruik word om die lopende gemiddelde te implementeer, word hieronder getoon, en dit gebruik gemiddeld 3 metings om die insetsein glad te maak. Drie metings is gekies omdat daar nie veel geraas in die werklike insetsein was nie, dus slegs 'n paar metings was nodig om die waarde uit te brei. As daar meer geraas in die insetsein was, sou 'n groter aantal metings nodig wees. In situasies waar daar baie induktiewe komponente (d.w.s. motors) is, sal elektriese geraas 'n veel groter probleem wees.
https://gist.github.com/OMikeGray/b13f156c080a100a89e5bbd541d0565e
Gebruik terugvoer vir outomatisering
Die wonderlike ding met die implementering van terugvoer in u ontwerp is dat dit u toelaat om 'n self-outomatiese stelsel te skep wat weet waar u moet wees vir 'n gegewe insette. Om die terugvoering van potensiometer in 'n outomatiese stelsel te gebruik, kan u u begeerte uit die lang lengte van u lineêre aktuator vergelyk met die werklike posisie wat deur die potensiometer gegee word. Dan moet u net vir u aktuator sê om dienooreenkomstig uit te brei of terug te trek. Alhoewel die gebruik van potensiometer -terugvoer in 'n outomatiese stelsel 'n paar probleme het, moet u dalk oorkom. Een daarvan is die kwessie van elektriese geraas, wat hierbo bespreek is, die ander kan herhaalbare resultate behaal. Aangesien potensiometers oor die algemeen nie so sensitief is vir kleiner bewegings van die lineêre aktuator nie, in vergelyking met die ander terugvoeropsies, maak dit die bereiking van presiese herhaalbare resultate moeiliker. In die praktyk beteken dit dat u 'n foutmarge rondom u gewenste posisie het, wat aanvaarbaar is vir u gegewe aansoek. As u nie baie presiese posisies nodig het nie, of 'n handskakelaar met 'n mikrobeheerder vervang om u stelsel te outomatiseer, sal posisionele terugvoer van 'n potensiometer akkuraat genoeg vir u wees. As u wel akkurate posisionering van u lineêre aktuator benodig, moet u dit miskien oorweeg Ander terugvoeropsies vir u lineêre aktuator of voeg addisionele komponente by om meer betroubare resultate te lewer. Hierdie komponente sluit sensors of Eksterne limietskakelaars wat u 'n beter aanduiding van absolute posisie kan gee.

Om nie herhaalbare resultate te kan bereik nie, is ook 'n probleem wanneer u verskeie lineêre aktueerders beheer. Aangesien die uitsetsein van die potensiometer maklik beïnvloed kan word deur elektriese geraas, insluitend elektriese geraas van die ander aktuators, en afhanklik is van die insetspanning na die potensiometer, kan dit 'n uitdaging wees om veelvuldige lineêre aktuators tegelyk te beweeg. Die gebruik van digitale filters, die waarborg van stabiele insetspanning na die potensiometer, en die uitsetseindrade van ander induktiewe komponente sal help om meer herhaalbare resultate te verseker. Alhoewel, as u wel verskeie aktuators gelyktydig wil uitvoer, kan dit beter wees om na die Ander terugvoeropsies vir lineêre aktuators.



