介绍
在线性运动领域,可以通过各种手段来协调多个执行器。而集成的控制板像 FIRGELLI FCB-1提供了无缝,无所不能的解决方案,寻求更动手方法的爱好者和工程师可能会选择涉及Arduino Uno R3的设置。在这篇文章中,我们将引导您完成两种方法,以确保您拥有做出明智决定所需的所有信息。
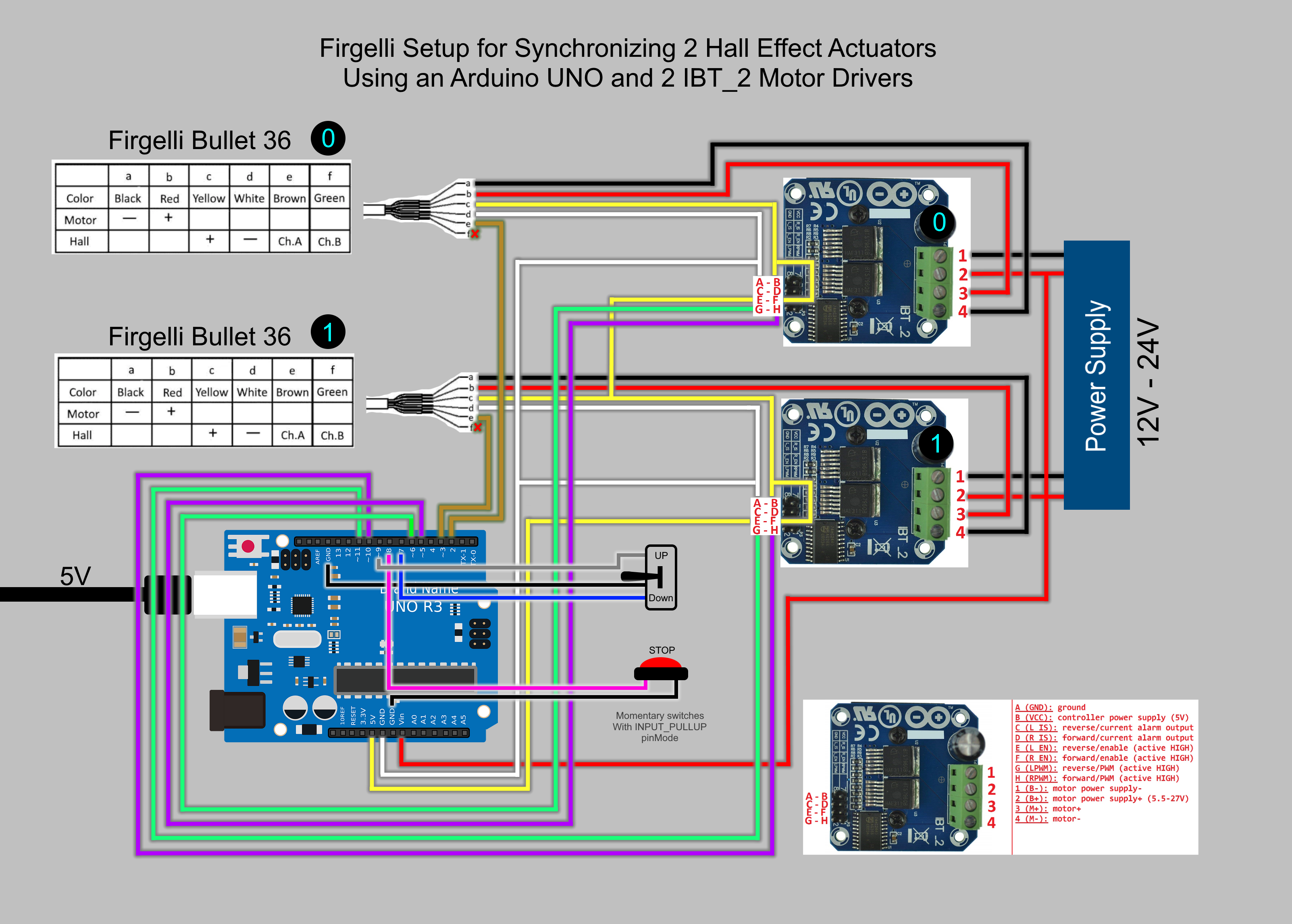
选项1:与Arduino Uno R3同步执行器
需要组件:
- Arduino Uno R3
- 高电动机驱动器IBT-2 (每个执行器一个)
- 子弹执行器 带有内置的大厅传感器(或具有光反馈的传感器)
- 摇杆开关
- 停止按钮
- Arduino的5V电源
- 12V直流执行器的电源
- Arduino代码 - 遵循此 关联 获取此设置的代码
接线和操作:
-
连接执行器: 将每个子弹执行器连接到高电流驱动器。这些驱动程序是必不可少的,因为Arduino没有输出足够的电流来直接操作执行器。
-
整合Arduino: 将Arduino Uno R3连接到电动机驱动器。确保Arduino连接到其5V电源。
-
摇杆开关安装: 合并摇杆开关,以控制执行器的向上和向下运动。
-
紧急停止按钮: 作为安全措施,如提供的接线图所示,将停止按钮集成到电路中。
-
功能: Arduino计算每个执行器的霍尔传感器中的脉冲,调整更快的执行器的速度以与较慢的脉冲同步,从而确保均匀的运动。
-
电源供应: 请记住将执行器连接到12V直流电源以确保最佳性能。
在这种情况下,使用配备了内置厅传感器的子弹执行器。但是,这些执行器具有通用性,也与光学反馈控制系统兼容。这种兼容性之所以成为可能,是因为Arduino发出了一致的5V信号,无论它是连接到大厅还是光学传感器的连接,控制器根本无法区分两者。
工作原理很简单。 Arduino处理从每个执行器的Hall传感器中收到的脉冲。如果它标识了两个执行器之间的速度差异,它会介入,降低了更快的单元的速度以与较慢的单元保持一致,从而确保同步操作。
但是,要考虑的功率限制。 Arduino本身无力提供所需的电流以有效地驱动执行器,尤其是那些要求3-10A功率的人。这是当前高电动机驱动程序发挥作用的地方。它们充当桥梁,扩大了Arduino的信号,以确保执行器获得足够的功率以获得最佳性能。这种设置不仅可以同步,而且还确保了执行器的强大而有效的操作。
选项2:使用 FIRGELLI FCB-1控制器可轻松同步
对于那些寻求简单性和易用性的人 FIRGELLI FCB-1执行器控制器 作为高级选择。凭借用户友好的功能和简化的接线过程,它是可行的替代方案。
特征:
- 内置的LED触摸屏,可轻松编程和操作。
- 能够同步多达4个执行器。
- 仅需要一个12V直流电源输入。
- 无需复杂的编程。
设置的步骤:
-
连接执行器: 直接将多达4个执行器连接到 FIRGELLI FCB-1。
-
电源供应: 将12V直流电源输入连接到控制器和连接的执行器供电。
-
利用LED触摸屏: 使用直观接口来编程和控制执行器,设置限制,速度和其他参数。
在下面观看He视频,以查看FCB-1控制器的作用。
结论
虽然Arduino设置提供自定义,并且是发烧友的学习曲线,但 FIRGELLI FCB-1控制器承诺便捷和效率,将自己标记为那些优先考虑简单性和功能的人的首选。评估您的特定需求,技术能力和项目需求,以选择与目标无缝保持一致的选项。快乐的建筑!



