Что такое Arduino?
Ардуино Это платформа для прототипов электронных продуктов с открытым исходным кодом, основанная на гибком и простом в использовании аппаратном и программном обеспечении. Он подходит для проектов DIY, художников, дизайнеров, любителей и всех, кто заинтересован в создании интерактивных проектов. Arduinos - это микроконтроллерная плата, которая содержит все, что вам нужно, чтобы легко взаимодействовать с микроконтроллером. Микроконтроллеры, как и мини - компьютеры для встроенных систем, будут включать тип микроконтроллера, который будет зависеть от стиля Arduino. Диапазон Arduino больше. Ардуино - Мега До среднего Микроконтроллер Меньше Компания Arduino Pro MiniПластины разных размеров будут предлагать все больше и больше выводов I / O и дополнительных функций, наиболее популярным из которых является Uno. Arduino также предлагает бесплатный IDE с открытым исходным кодом для программирования вашего микроконтроллера. Arduino IDE использует понятный язык программирования, и благодаря популярности Arduino вы можете найти много полезных примеров в Интернете, чтобы помочь вам написать код для конкретного приложения. Если это ваш первый проект Arduino Комплект Arduino Вам будет предоставлено все, что вам нужно, от переходов до датчиков и реле, включая Arduino Uno, чтобы вы могли начать работать.

Зачем использовать Arduino для управления линейным исполнительным устройством?
Используйте Arduino или любой микроконтроллер для управления Линейный привод Вы можете лучше контролировать свой линейный привод. Микроконтроллеры позволяют использовать более сложные входы от датчиков или других устройств для управления линейными приводами. Они позволяют заранее производить вычисления в реальном времени для определения местоположения Привод Установите таймер в идеальном месте, чтобы автоматически изменить местоположение вашего исполнительного органа. Микроконтроллеры также могут получать обратную связь от приводов, чтобы обеспечить более точное управление положением и скоростью, а также управление несколькими приводами одновременно. Проще говоря, микроконтроллеры предоставляют вам больший контроль и гибкость, а также минимальный дополнительный уровень сложности благодаря простому в использовании дизайну Arduino и широкой популярности.
Управление линейным исполнительным устройством с помощью Arduino
Вы не сможете подключить линейный исполнительный аппарат непосредственно к Arduino, как с помощью переключателя, потому что рабочее напряжение Arduino составляет всего 5 В, а ограничение тока очень мало. Вам нужно использовать промежуточный компонент для управления линейным приводом, который может быть выполнен с помощью реле или привода двигателя.
Реле
Как упоминалось выше Здесь., Реле Это электромагнитный переключатель, который открывает и закрывает переключатель путем включения и выключения обмотки. Arduino может использоваться для управления реле путем включения и отключения тока с помощью ввода / вывода. В зависимости от типа реле, которое вы используете, степень управления линейным исполнительным устройством изменится, но интерфейс с Arduino очень прост, просто включите катушку с помощью ввода / вывода. Вы должны убедиться, что номинальное напряжение катушки находится около рабочего напряжения Arduino (5V), иначе Arduino не сможет включить катушку, что приведет к закрытию переключателя.
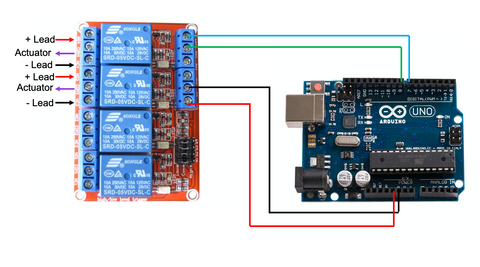
Вот пример интерфейса конфигурации Arduino с двумя реле SPDT. В этой конфигурации, описанной здесь, два реле используются для опрокидывания полярности напряжения в линейный привод и отключения питания от привода. В приведенном ниже примере кода Arduino включит верхнее реле, установив штырь 7 на низкий уровень, продлив привод на 2 секунды, а затем отключив включение верхнего реле, установив два штыря на высокий уровень, в результате чего привод остановится на 2 секунды. Чтобы уменьшить привод, Arduino остановит привод на 2 секунды, установив вывод 8 на низкий уровень для включения второго реле, а затем снова установив все выводы на высокий уровень. Поскольку этот код находится в циклической части программы, Arduino будет повторять его снова и снова. Очевидно, что вы можете реализовать более элегантное решение для кодирования для своего приложения, но если вы хотите больше контроля, вам нужно использовать электрический привод.
https://gist.github.com/OMikeGray/6bf644b6cda85bfe8c898ccd44ec6d78
Электропривод
А. Двигатель Это интегральная схема, предназначенная для управления двигателем постоянного тока, приводящим линейный привод постоянного тока. Электроприводы обычно используют H - мост для управления направлением и скоростью. Как точно подключить Arduino к приводу двигателя будет зависеть от точного привода двигателя, но для этого потребуется по крайней мере два ввода / вывода, один из которых является сигналом PWM. PWM или широтно - импульсная модуляция - это метод изменения сигнала между значениями включения и отключения, чтобы эффективно обеспечить более низкое рабочее напряжение. Затем привод двигателя может использовать этот сигнал для регулировки скорости работы двигателя.
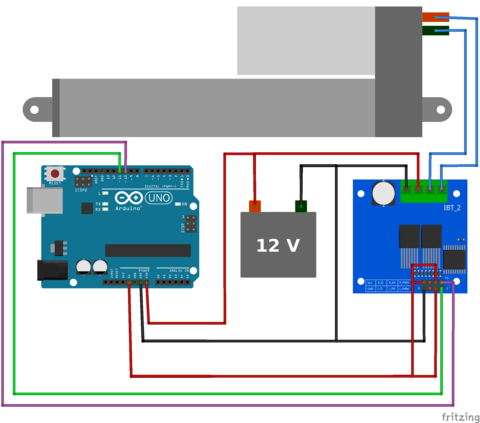
Вот наш пример. привод двигателя постоянного тока Интерфейс с Arduino. Для этого привода двигателя необходимо отправить два сигнала PWM, один для вытягивания исполнительного устройства, а другой для отступа. PWM - это беззнаковый байт, что означает, что его диапазон от 0, без напряжения до 255, максимальное напряжение (5V), которое будет пропорционально скорости двигателя. Поскольку PWM не является двоичным значением, нам нужно использовать вывод PWM Arduino и использовать функцию аналоговой записи, как показано ниже. Вывод PWM будет использоваться в Arduino или просто помечен как вывод PWM.
https://gist.github.com/OMikeGray/c4e0196704a4d62db5507ad8297708f4
В приведенном выше примере кода Arduino расширит привод на полную скорость на две секунды, отправив все 5 В в штыре 10 на штырь LPWM на привод двигателя. Затем Arduino останавливает привод, не посылая никаких сигналов на какой - либо входной вывод привода двигателя. Затем Arduino отправляет полувыключенный сигнал привода двигателя от штыря 11 к штырю RPWM на приводе двигателя, сжимая привод на полскорости. Затем снова остановите исполнителя. Поскольку этот код находится в циклической части программы, Arduino будет повторять его снова и снова. Опять же, вы можете реализовать более элегантное решение для кодирования, подходящее для вашего приложения, особенно если вы добавляете вход для управления исполнительным устройством.
Добавить ввод
Как только вы можете управлять своим приводом с помощью Arduino, вы можете реализовать вход в Arduino для большей автоматизации и управления. Эти входы могут быть КоммутаторШирокий спектр датчиков, даже обратная связь от самого привода. Поскольку существует множество вариантов ввода, способы их реализации будут разными, но вы должны знать некоторые общие моменты. Если ввод обеспечивает двоичный ввод, например, переключатель, вам нужно использовать цифровые выводы на Arduino, которые будут отмечены на панели или в таблице данных, а также функции digitalRead () в ArduinoIDE. Если ваше устройство ввода обеспечивает аналоговый сигнал, вам нужно использовать аналоговый вывод и использовать функцию analog Read ().



