Placa de controle síncrono FA-SYNC-X
O Firgelli A placa de controle síncrono FA-SYNC-2 e FA-SYNC-4 de automação permite controlar até 2 e 4 atuadores lineares, respectivamente, e garantir que eles se movam em passo e na mesma velocidade, independentemente da carga. Isso também protegerá seu projeto, pois o movimento não sincronizado pode levar à flexão e danos à carga ou aos atuadores. Isto é importante em aplicações onde mais de um atuador é usado para mover a mesma carga, como acontece com alçapões, elevadores de teto para trailers e coberturas de tonneau. Essas placas exigem atuadores lineares que possuem feedback interno e todos os atuadores lineares devem ser do mesmo tipo, com o mesmo comprimento de curso e força. Usar atuadores lineares diferentes não funcionará e a placa não será capaz de garantir o movimento síncrono. Para obter uma lista de atuadores lineares compatíveis e não compatíveis, confira o Página do produto FA-SYNC-X.
Por que utilizar a placa FA-SYNC-X com um Arduino?
Utilizando tanto um Arduíno e uma placa FA-SYNC-X permitirá que você obtenha os benefícios de ambas as placas. Com o Arduino, você será capaz de implementar uma automação muito maior em comparação com o uso de um trocar com a placa FA-SYNC-X. Embora você possa desenvolver seu próprio controlador síncrono com um Arduino, utilizar a placa FA-SYNC-X reduzirá drasticamente a complexidade do código do Arduino e garantirá que seus atuadores lineares se movam simultaneamente. A utilização dessas placas juntas é ideal para aplicações onde você precisa que vários atuadores lineares se movam com base na entrada de um sensor ou com base em um temporizador interno, como o posicionamento de painéis solares para obter o máximo de luz solar.

Configuração e calibração
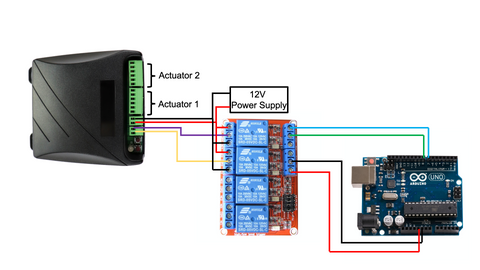
Configurando o Placas FA-SYNC-X ser controlado por um Arduino é feito de maneira semelhante a outras aplicações e você deve seguir as manual do usuário para que essas placas façam isso corretamente. A conexão dos atuadores lineares às placas FA-SYNC-X ainda é feita usando os blocos de terminais de 2 ou 4 pinos de 6 pinos e conectando os fios de alimentação, aterramento, alimentação do sensor, aterramento do sensor, saída do sensor 1 e saída do sensor 2 do atuador linear ao terminal correspondente no bloco de terminais. Você também alimentará a placa FA-SYNC-X de forma semelhante, conectando a tensão de alimentação, 12 V ou 24 V, à alimentação no bloco terminal de 2 pinos, que fica à esquerda dos blocos terminais de 6 pinos. Você deve garantir que conecta os fios positivo e negativo do fonte de energia ao terminal de entrada adequado porque se forem invertidos, causarão danos permanentes à placa FA-SYNC-X. Para calibrar sua placa FA-SYNC-X, você ainda seguirá o mesmo procedimento descrito no manual do usuário destas placas.

Depois que a placa FA-SYNC-X estiver conectada e calibrada, você poderá interligá-la com a placa Arduino. Você ainda controlará a placa FA-SYNC-X usando o bloco terminal de controle, o bloco terminal de 2 pinos mais à esquerda, mas em vez de usar um interruptor ou controle remoto para controlar a direção dos atuadores lineares, você usará um Arduino. Um problema é que o Arduino não fornecerá uma tensão de entrada alta o suficiente para controlar os relés internos da placa FA-SYNC-X, mas podemos usar relés externos para superar esse problema. Como quando controlando um atuador linear com um Arduino, podemos utilizar 2 relés SPDT para controlar a placa FA-SYNC-X. Precisaremos conectar o pino COM de cada relé a um dos pinos do bloco terminal de controle e conectar o pino normalmente aberto (NA) de cada relé ao positivo da fonte de alimentação e ao pino normalmente fechado (NC) de cada relé ao negativo da oferta. Você controlará esses dois relés externos com os pinos digitais do Arduino, como visto abaixo. Neste caso, você também precisa alimentar o placa de relé usando o Arduino também.
Controlando a placa FA-SYNC-X com um Arduino
Depois que o Arduino e a placa FA-SYNC-X estiverem conectados e a placa FA-SYNC-X estiver conectada e calibrada para seus atuadores lineares, você poderá controlá-los utilizando entradas para o Arduino. Embora o código para o Arduino ler as entradas dos sensores varie de acordo com os sensores usados em sua aplicação, o código para controlar a placa FA-SYNC-X será semelhante. O código para controlar a placa FA-SYNC-X será muito semelhante ao código usado para controlar um atuador linear com um Arduino. Para estender os atuadores lineares, você precisará conectar o pino A no bloco terminal de controle da placa FA-SYNC-X a uma tensão positiva, enquanto conecta o pino B ao terra. Para fazer isso com o Arduino, você simplesmente precisa energizar o relé inferior conectando a entrada desse relé ao terra (já que a placa de relé usada acima é ativa-baixa) e conectará o pino A a uma tensão positiva. O pino B já estará conectado ao terra, pois cada relé está conectado ao terra quando não está energizado conforme nossa configuração. Para retrair os atuadores lineares, você seguirá os mesmos passos, mas para o pino B. Você energizará o relé superior que conectará o pino B a uma tensão positiva, conectando o pino de controle desse relé ao terra. Para parar os atuadores lineares, basta desenergizar todas as bobinas e os pinos A e B serão conectados ao terra. O exemplo de código abaixo mostra o uso do código para estender, retrair e parar os atuadores lineares conforme descrito acima. O código não mostra como implementar sensores de entrada ou temporizadores usados para controlar quando parar e mover os atuadores lineares, pois isso varia de acordo com os sensores usados e a aplicação.
Desvantagens
A maior desvantagem de utilizar uma placa FA-SYNC-X com um Arduino é que o próprio Arduino não saberá a posição exata do atuador linear. Como o feedback enviado para a placa FA-SYNC-X não é compartilhado com o Arduino, não há como saber exatamente onde está o atuador. Isso pode limitar o nível de automação e controle que você tem sobre seus atuadores lineares, pois você não será capaz de posicioná-los com base no feedback, embora isso não seja um problema se você estiver estendendo e retraindo totalmente o atuador linear. A solução mais simples para superar isso é estimar a distância que seu atuador se move por milissegundo e usar o temporizador interno millis() do Arduino para estimar a posição com base no tempo total que o atuador está funcionando, embora isso não forneça um posicionamento preciso . Se você precisar de uma posição precisa, poderá superar esse problema adicionando um elemento de feedback externo ao seu projeto, como umpotenciômetro linear externo, para fornecer feedback ao Arduino.

Resumo
Embora existam algumas desvantagens em usar Placa FA-SYNC-X com um Arduíno, eles podem não ser um problema no seu design. Usando essas placas juntas, você poderá garantir o movimento simultâneo de vários atuadores lineares, independentemente da carga, com um maior nível de automação. O uso dessas placas em conjunto é ideal para aplicações que exigem o uso de vários atuadores lineares para mover uma única carga e você deseja automatizar a movimentação com base na entrada do temporizador ou do sensor.



