이 프로젝트는 Tivo 원격 제어와 Arduino 보드를 활용하여 TV를 덮는 그림을 들어 올리는 선형 액추에이터를 작동시키는 방법을 보여줍니다. 끝에서 비디오를보십시오
필요한 도구
이 프로젝트를 완료하려면 다음 도구가 필요합니다.
- #0 Phillips 스크루 드라이버
- 납땜 인두
- 솔더
- 와이어 커터
- 작은 펜치 (나는 작은 전자 제품을 사용하도록 설계된 플라이어를 사용했습니다)
부품 목록
이 프로젝트를 완료하려면 다음 부분이 필요합니다.
- 헤비 듀티 트랙 액추에이터 Firgelli 자동화
- Tivo Roamio 리모컨
- Arduino Uno Rev 3
- Hammond 1591ESBK ABS 프로젝트 박스 블랙 (7.5”x 4.3”x 2.2”)
- Arduino를위한 미세 IB171 170 포인트 미니 브레드 보드
- 적외선 수신기 2.5–5.5V 38kHz
- 100pcs Michael Josh 20cm m/f 점퍼 와이어 케이블 1 핀 플러그 남성 대 여성
- Sainsmart 2 채널 릴레이 모듈
- USB 2.0 케이블-A- 남성에서 B- 남성
- 18/5 블랙 스프링클러 와이어의 4 피트
- 8 수량 #4–40 x 2”스테인리스 머신 나사 (홈 디포에서 구입했습니다)
- 8 Qty Everbuilt #4–40 머신 스크류 너트 (홈 디포에서 구입했습니다)
- 16 수량 ½”나일론 스페이서 (홈 디포에서 구입했습니다)
- 1 Qty Zip Tie
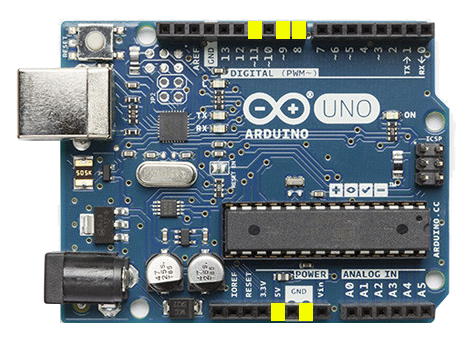
Arduino Uno Rev 3
우리는 Arduino 보드의 다음 핀을 노란색으로 강조 표시합니다.
- 전원 5V
- 디지털 #8
- 디지털 #9
- 디지털 #11
- 전원 Gnd
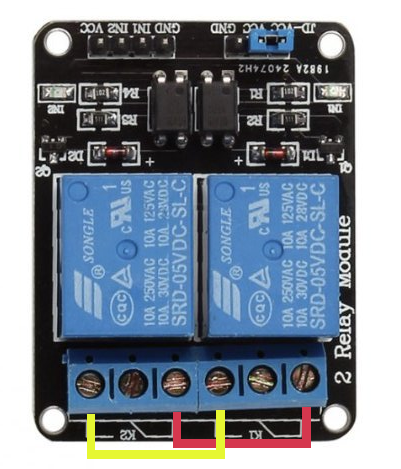
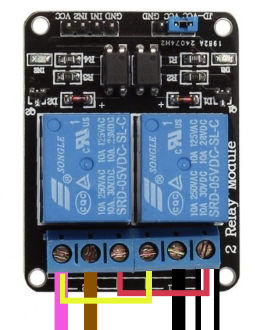
Sainsmart 2 채널 릴레이 모듈 설정
우리는 Firgelli 자동화 선형 액추에이터. JD-VCC에서 VCC까지 파란색 점퍼가 있습니다. 이것을 제자리에 두십시오.
점퍼 K1 위치 1 ~ K2 위치 1
K1 릴레이의 첫 번째 위치에서 점퍼 와이어를 K2 릴레이의 첫 번째 위치로 놓습니다. 우리 점퍼는 빨간색으로 표시됩니다.

점퍼 K1 위치 3 내지 K2 위치 3
K1 릴레이의 세 번째 위치에서 점퍼 와이어를 K2 릴레이의 세 번째 위치로 놓습니다. 우리 점퍼는 노란색으로 표시됩니다.

제대로 점프하면 다음 구성이 표시됩니다.
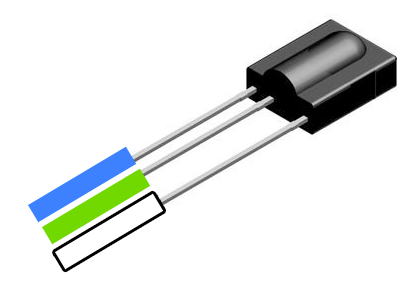
적외선 센서 설정
적외선 센서에는 3 개의 와이어가 떨어집니다. 하나는 접지 와이어를위한 것이고, 하나는 5V 전원 와이어이며, 세 번째는 신호를 Arduino 보드로 보냅니다.
18-5 스프링클러 와이어에서 외부 방패의 2 인치를 뒤로 젖히려면 색상의 전선을 내부에 노출시킵니다. 우리는 녹색, 흰색 및 파란색 와이어 만 사용하므로 다른 전선을 잘라서 엉망이 될 필요가 없습니다.
우리가 사용할 각 와이어에서 단열재의 ⅛”를 벗겨냅니다. 다음 구성을 사용하여 릴레이에 납땜됩니다. 둥근 범프가 당신을 향한 상단에서 센서를 볼 때 :
- 파란색 와이어를 왼쪽 터미널로 납땜하십시오.
- 녹색 와이어를 중간 터미널로 납땜하십시오.
- 흰색 와이어를 오른쪽 터미널로 납땜하십시오.
선형 액추에이터의 배선 하네스 설정
선형 액추에이터에는 두 개의 삼각형 버튼이있는 유선 리모컨이 제공됩니다. 한 버튼은 선형 액추에이터를 위로 움직이는 스위치를 활성화하고 다른 버튼은 아래로 이동합니다.
회로 보드 원격 제어 본체를 제거하십시오
첫 번째는 리모컨 뒷면에서 와이어를 풀어주는 것입니다. #0 Phillips 스크루 드라이버로 제거해야합니다.
원격 제어 본체에서 회로 보드를 제거하고 와이어를 검사하십시오. 바닥에서 그것을 보면 보드에 4 개의 와이어가 납땜되어야합니다. 왼쪽에서 오른쪽으로 아래에 표시된 것처럼 검은 색, 흰색, 자주색 및 갈색입니다.
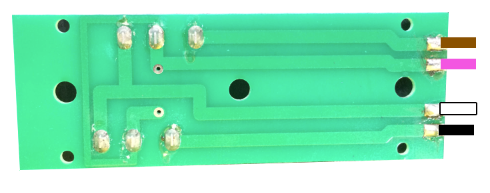
어떤 이유로 다른 색상을 사용했다면 아래와 같은 순서로 색상을 추적하십시오.
전선을 쫓아 내십시오
납땜 철을 사용하여 회로 보드에서 와이어를 제거하십시오. 솔더 포인트의 기존 솔더에 납땜 철의 끝을 부드럽게 누르고 작은 플라이어를 사용하여 납땜 지점에서 와이어를 부드럽게 당겨 둡니다.
전선을 릴레이에 부착하십시오
이제 유선 원격 제어에서 Sainsmart 2 채널 릴레이에 전선을 연결합니다. #0 Phillips 스크루 드라이버를 사용하여 터미널을 풀고 다시 조이므로 와이어를 고정하십시오.
- 흰색 와이어는 K1 위치 1로 들어갑니다
- 블랙 와이어는 K1 위치 2로 들어갑니다
- 갈색 와이어는 K2 위치 2로 들어갑니다
- 보라색 와이어는 K2 위치 3으로 들어갑니다
참고 : 기존 점퍼 와이어를 제거하지 마십시오. 터미널을 조일 때 그대로 두십시오.
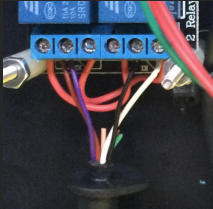
완료되면 위의 이미지처럼 보일 것입니다.
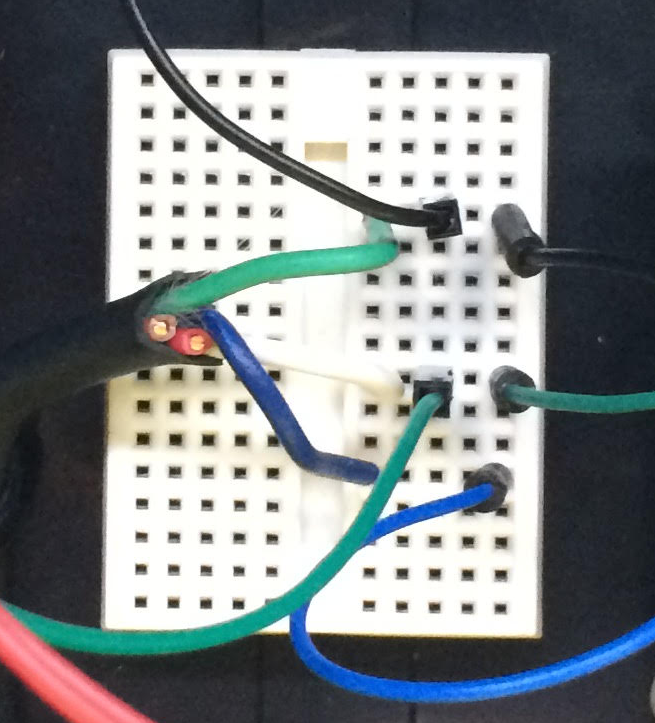
브레드 보드를 배선합니다
이제 우리는 Arduino 보드를 브레드 보드로 연결합니다. 빵 보드를 사용하면 Arduino 또는 릴레이에 하나의 터미널에 여러 개의 연결이 이루어지는 점퍼 연결이 발생할 수 있습니다.
각 구멍 행이 서로 연결되어 해당 행에있는 모든 것을 점퍼 할 수 있습니다. 다음은 우리가 연결해야 할 항목입니다.
5V 전원
- Arduino의 Power 5V 터미널에서 빵 보드의 사용되지 않은 행까지 남성-여성 점퍼 와이어를 사용하십시오. 줄의 구멍으로 밀어 넣으십시오.
- 브레드 보드의 같은 행에서 Sainsmart 2 채널 릴레이의 VCC 터미널까지 남성 여성 점퍼 와이어를 사용하십시오. 같은 행의 구멍으로 밀어 넣으십시오.
- 18-5 스프링클러 와이어의 반대편에서 흰색 와이어의 ¼”을 노출시킵니다. 같은 행의 구멍으로 밀어 넣으십시오.
지면
- Arduino의 Power GND 터미널에서 빵 보드의 미사용 줄로 남성 여성 점퍼 와이어를 사용하십시오. 줄의 구멍으로 밀어 넣으십시오.
- Sainsmart 2 채널 릴레이의 GND 터미널의 Male-Female 점퍼 와이어를 사용하여 다른 GND 와이어와 같은 행의 구멍에 사용하십시오. 같은 행의 구멍으로 밀어 넣으십시오.
- 18-5 스프링클러 와이어의 반대편에서 녹색 와이어의 ¼”을 노출시킵니다. 같은 행의 구멍으로 밀어 넣으십시오.
신호
- Arduino의 Digital #11 터미널에서 빵 보드의 미사용 행까지 Male-Female 점퍼 와이어를 사용하십시오. 줄의 구멍으로 밀어 넣으십시오.
- 18-5 스프링클러 와이어의 반대편에서 ¼”의 파란색 와이어를 노출시킵니다. 같은 행의 구멍으로 밀어 넣으십시오.
완료되면 브레드 보드는 다음 이미지처럼 보일 것입니다.
Arduino에 제어 프로그램을 설치하십시오
다운로드하고 설치해야합니다 Arduino Ide. IDE를 다운로드하여 설치 한 후에는 IDE를 열십시오.
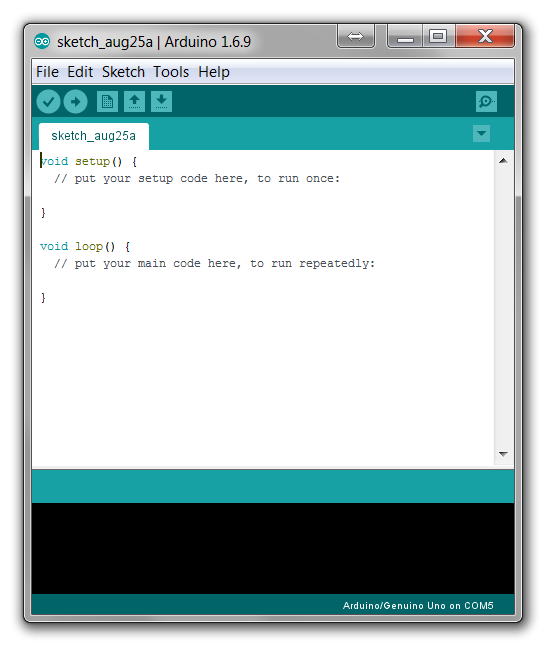
코드를 IDE에 복사하여 붙여 넣습니다
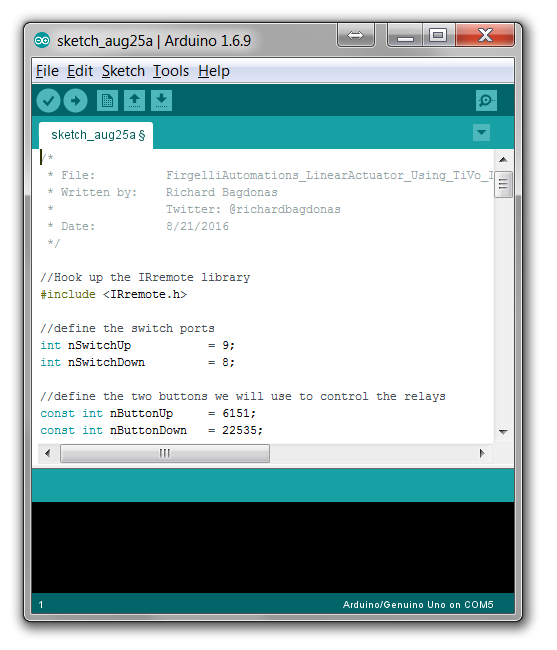
소스 코드를 다운로드하거나 복사하십시오 github 그리고 IDE의 창에 붙여 넣어서 완료되면 이와 같이 보일 것입니다.
irremote.cpp 파일을 조정하십시오
C : \ Program Files (x86) \ Arduino \ Libraries \ robotirreRemote \ Src \ Directory에는 GitHub 소스 코드가 컴파일되는 것을 방지하는 파일이 있습니다. Notepad와 같은 간단한 텍스트 편집기에서 irremotetools.cpp 파일을 열고 다음 줄을 변경하십시오.
5 행은 다음과 같아야합니다.
int recv_pin = tkd2; // IR 수신기가 연결되어 있습니다
다음으로 변경하고 파일을 저장하십시오.
int recv_pin = 11; // IR 수신기가 연결되어 있습니다
USB 케이블을 사용하여 Arduino를 컴퓨터에 연결하십시오.
Arduino, Breadboard 및 Relay Boards를 나무 책상과 같은 비전도 표면에 놓으십시오.
USB 케이블의 사각형 측면을 컴퓨터에 그리고 "D"쪽을 Arduino 보드에 연결하십시오.
포트를 선택하십시오
도구 - 포트 메뉴 항목을 선택하고 Arduino 보드를 보여주는 것을 선택하십시오.
코드를 업로드하십시오
스케치 - 메뉴 항목 업로드를 선택하여 코드를 Arduino에 업로드하십시오.
코드를 테스트하십시오
코드가 업로드 된 후에는 와이어 하네스를 Firgelli 자동화 선형 액추에이터를 액추에이터에 다시 넣고 액추에이터를 연결합니다.
USB 케이블을 통해 Arduino 보드를 컴퓨터에 연결하십시오.
적외선 센서에서 TIVO 리모콘을 가리키고 녹색 엄지 "좋아요"버튼을 클릭하십시오. 액추에이터가 위로 올라 가야합니다.
적외선 센서에서 TIVO 리모콘을 가리키고 빨간 엄지 손가락 "싫어하는"버튼을 클릭하십시오. 액추에이터는 아래로 이동해야합니다.
모든 것을 상자에 올리십시오
나는 기계 나사, 스페이서 및 기계 나사 너트와 함께 Hammond 프로젝트 상자를 사용하여 회로 보드를 수용했습니다. 나는 납땜 철에 포인트 팁을 사용하여 검은 색 플라스틱 상자를 통해 구멍을 찌르고 측면을 통해 전선을위한 공간을 만듭니다. 나는 Zip Tie를 사용하여 적외선 센서의 와이어가 꺼지는 것을 막았습니다. 제어 와이어 Firgelli 자동화 선형 액추에이터 고무 조각을 잡아 당기지 못하도록 설계되어 활용할 수있었습니다.
저자에 대해
Richard Bagdonas는 Point of Sale, Electronic Health Record, 고객 관계 관리 및 창고 관리 시스템과 15 년 이상의 경험을 가진 데이터 통합 전문가입니다. Richard는 어렸을 때부터 전자 제품을 땜질했으며 이것이 그의 첫 Arduino 프로젝트입니다.
Richard는 현재 MI7의 최고 의료 건축가로 회사와 전자 건강 기록 시스템과의 통합을 감독합니다.



