2종 레버를 계산하는 방법 - 아래 계산기를 사용해 보세요
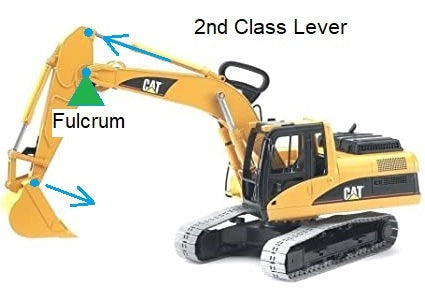
2종 지레는 받침점이라고 불리는 고정점을 중심으로 회전하는 단단한 막대로 구성된 간단한 기계입니다. 하중 또는 중량은 지지점과 하중을 이동하기 위해 가해지는 노력 또는 힘 사이에 위치합니다.. 즉, 하중은 작용력보다 지지점에서 더 멀리 떨어져 있으며 하중의 반대 방향으로 작용력이 작용하게 됩니다.
2종 지레는 하중에 가해지는 힘을 증가시키는 데 사용됩니다. 힘보다 지지점에 더 가까운 하중을 배치함으로써 레버 끝에 작은 힘이 가해질 수 있으며, 하중이 지지점에서 멀어질수록 증폭됩니다. 이러한 유형의 지레는 1종 또는 3종 지레만큼 일반적이지는 않지만 많은 실제 사례에서 찾을 수 있습니다.
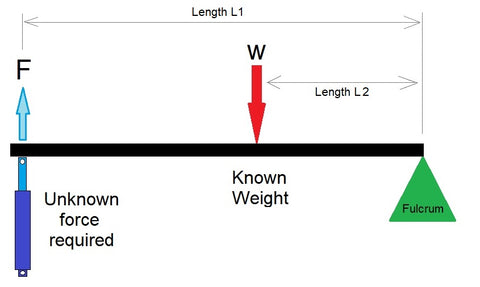
2종 지레의 기계적 이점을 계산하려면 하중에서 지지점까지의 거리(L)와 힘점에서 지지점까지의 거리(E)의 비율을 결정해야 합니다. 기계적 이점(MA)은 다음과 같이 표현될 수 있습니다.
MA = L / E
2종 지레의 실제 사례는 다음과 같습니다.
- 호두까기 인형: 호두까기 인형은 2종 지레의 일반적인 예입니다. 하중은 레버의 두 암 사이에 있는 너트이며, 힘은 레버의 다른 쪽 끝에 가해집니다.
- 수레: 수레는 2종 지레의 또 다른 예입니다. 하중은 바퀴와 손잡이 사이에 있는 손수레 내용물의 무게입니다. 하중보다 지지점에 더 가까운 핸들에 힘이 가해집니다.
- 병따개: 병따개도 2종 지렛대입니다. 하중은 병의 캡이고 힘은 지지점에 더 가까운 레버의 다른 쪽 끝에 가해집니다.
요약하자면, 2종 지레는 하중에 가해지는 힘을 증가시키는 데 사용할 수 있는 간단한 기계입니다.. 다른 유형의 레버만큼 흔하지는 않지만 호두까기 인형, 손수레, 병따개 등 실제 사례에서 많이 볼 수 있습니다.
결과
필요한 액츄에이터 힘 F:
0파운드
0N
0kg
0g
계산의 원리
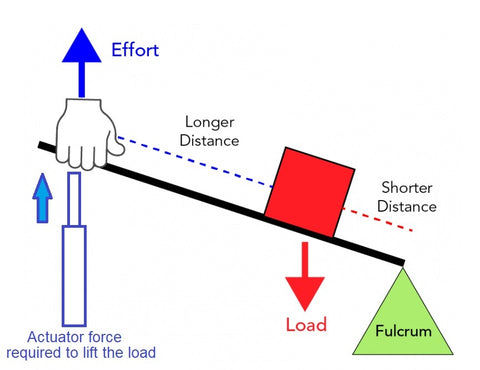
2종 지레에서는 하중이나 저항이 받침점과 힘점 사이에 위치합니다. 작용점 팔은 항상 로드 팔보다 길다. 2종 지레에 필요한 노력을 계산하는 공식은 다음과 같습니다.
노력 x 노력 팔 = 부하 x 부하 팔
어디:
- 노력(Effort): 짐을 움직이기 위해 지렛대에 가해지는 힘
- 노력 팔(Effort Arm): 지지점에서 힘이 적용되는 지점까지의 거리
- 하중: 레버에 의해 이동되는 무게 또는 저항
- Load Arm : 지지점에서 하중이 가해지는 지점까지의 거리
방정식에서 변수 중 하나를 찾으려면 다른 세 변수를 알아야 합니다.
토노 커버 리프트는 2종 레버를 사용합니다.

토너 커버의 경우 전동 액추에이터 덮개를 위아래로 들어 올리는 데 사용되면 무게가 전체 길이에 걸쳐 고르게 분산된다고 가정합니다. 이 경우 하중은 로드 암의 중간점에 작용하는 점하중으로 처리될 수 있습니다. 중간점은 로드 암이 로드 암 전체 길이의 절반과 같은 지점입니다..
- 노력(Effort): 짐을 움직이기 위해 지렛대에 가해지는 힘
- 노력 팔(Effort Arm): 지지점에서 힘이 적용되는 지점까지의 거리
- 하중: 레버에 의해 이동되는 무게 또는 저항
- 로드 암(Load Arm): 지지점에서 로드 암의 중간점까지의 거리
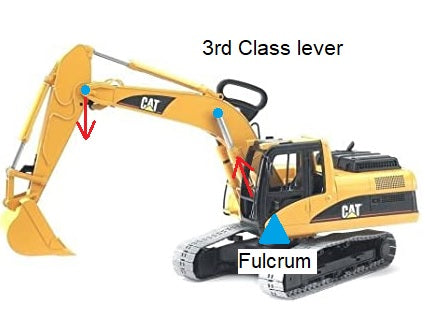
2종 지레는 3종 지레와 어떻게 다릅니까?
2종 지레와 3종 지레는 힘, 하중, 받침점이라는 세 가지 구성 요소의 배열이 다릅니다. 차이점을 요약하면 다음과 같습니다. 2종 레버:- 부하는 노력과 지지점 사이에 위치합니다.
- 힘은 하중의 반대 방향으로 움직입니다.
- 2종 레버는 일반적으로 기계적 이점을 제공합니다. 즉, 하중을 이동하는 데 필요한 노력이 하중에 의해 가해지는 힘보다 적다는 의미입니다.
- 2종 지레의 예로는 손수레, 호두까기 인형, 병따개 등이 있습니다.
- 힘은 지지점과 하중 사이에 위치합니다.
- 힘은 하중과 같은 방향으로 움직입니다.
- 제3종 레버는 일반적으로 기계적 단점을 제공합니다. 즉, 하중을 이동하는 데 필요한 노력이 하중에 의해 가해지는 힘보다 크다는 의미입니다. 그러나 그들은 종종 속도와 동작 범위의 이점을 제공합니다.
- 3종 지레의 예로는 핀셋, 사람의 팔다리(팔뚝에 작용하는 이두근 등), 타자가 쥐고 있는 야구 방망이 등이 있습니다.
우리는 다른 종류의 레버에 대한 블로그 게시물을 만들었습니다. 이에 대한 바로 가기는 아래와 같습니다.
2종 및 3종 지레의 실제 사례