機械的優位性の力を解き放つ:レバー、プーリー、ギア、油圧などの完全な調査
導入: 機械的利点メカニズムの詳細な調査へようこそ。この包括的なガイドでは、魅力的な力、速度、距離増幅、レバレッジ、効率の魅力的な世界を掘り下げます。あなたがDIY愛好家であれ、エンジニアであれ、物事がどのように機能するかについて単に興味を持っているかどうかにかかわらず、この記事は、さまざまなタイプの機械的利点メカニズムとそのアプリケーションに関する豊富な知識を提供します。レバー、プーリー、ギア、アクチュエーター、その他の独創的なデバイスの背後にある秘密を明らかにしてください。
目次:
- 機械的利点を理解する
- レバー:バランスとレバレッジのパワーを解き放つ2.1クラス1レバー2.2クラス2レバー2.3クラス3レバー2.4長所、短所、レバーのトレードオフ
- プーリー:荷重分布の芸術3.1固定プーリー3.2可動プーリー3.3コンパウンドプーリー3.4長所、短所、およびプーリーのトレードオフ
- 傾斜した飛行機とウェッジ:垂直方向の課題の征服4.1単純な傾斜面4.2ネジ4.3長所、短所、および傾斜のトレードオフ
- ギア:メッシュの精度とパワー5.1スパーギア5.2ベベルギア5.3ワームギア5.4長所、短所、およびギアのトレードオフ
- アクチュエーター:利点6.1 Pascalの原則6.2 アクチュエータ システム6.3長所、短所、およびトレードオフ アクチュエータ システム
- 機械的アドバンテージシステム:力、距離、速度7.1フォースアドバンテージシステム7.2距離アドバンテージシステム7.3スピードアドバンテージシステム7.4長所、短所、および機械的アドバンテージシステムのトレードオフ
- 結論
セクション1:機械的利点の理解
機械的な利点は、多くの日常のデバイスやマシンの中心にあり、より容易で効率的にタスクを達成できるようになります。特定のタイプの機械的優位性メカニズムに飛び込む前に、この概念を支える基本的な概念と原則を把握することが不可欠です。
1.1機械的利点の定義機械的利点とは、ツール、マシン、またはシステムを使用して達成される力または運動の増幅を指します。これにより、抵抗を克服したり、重いオブジェクトを持ち上げたり、追加の力を適用せずに挑戦的または不可能なタスクを達成したりすることができます。1.2機械的利点の重要性の理解機械的利点は、エンジニアリング、物理学、設計など、さまざまな分野で重要です。機械的優位性の力を活用することにより、エンジニアは機械とシステムのパフォーマンスと効率を最適化できます。シンプルなツールから複雑な産業機械まで、機械的な利点は、生産性の向上、身体的努力の低下、エネルギーの節約において重要な役割を果たします。
1.3物理学の原則を活用するコアでは、機械的利点は物理学の基本原則に根ざしています。そのような原則の1つは、エネルギーの保存であり、エネルギーを作成または破壊することはできないが、変換または転送することのみができると述べています。機械的利点メカニズムにより、特定のタスクをより効果的に達成するために、ある形式から別の形式にエネルギーを変換することができます。
1。
- 力の利点: フォースアドバンテージシステムは、入力力を増幅して、より大きな出力力を生成します。これにより、最初に適用されているものよりも大きな力を発揮し、重いオブジェクトを比較的容易に持ち上げたり動かしたりすることができます。レバーと油圧システムは、力の利点メカニズムの例です。
- 距離の利点: 距離アドバンテージシステムを使用すると、より小さな入力変位を使用して、距離を長くカバーしたり、より広い範囲の動きを達成したりできます。これらのメカニズムは、入力に対する出力距離または変位を増加させることにより、機械的な利点を提供します。プーリーシステムと傾斜面は、距離アドバンテージメカニズムの一般的な例です。
- スピードアドバンテージ: 速度アドバンテージシステムでは、出力速度が入力速度に比べて増加します。これにより、力や距離を犠牲にすることにより、タスクをより迅速に完了できます。ギアと特定の種類のプーリーシステムを利用して、速度の優位性を達成できます。
- 力アドバンテージシステム 重いオブジェクトを持ち上げたり、重大な力を発揮したりする必要があるタスクで優れています。ただし、目的の出力力を達成するには、より多くの投入努力またはエネルギーが必要になる場合があります。さらに、力の利点メカニズムは、しばしば力の増幅を支持して速度または距離を犠牲にします。
- 距離アドバンテージシステム 小さな入力力を使用して、可動域または変位を増やします。それらは、オブジェクトを遠くに移動することを含むタスクに適しています。ただし、距離アドバンテージメカニズムには、入力努力の増加またはより長い入力変位が必要になる場合があります。
上記の伸縮式アクチュエータをどのようにプーリーとリードスクリュードライブを使用して作成できるかをご覧ください
- スピードアドバンテージシステム 速度または迅速な動きを優先するタスクに最適です。彼らは迅速にタスクを達成することができますが、力や距離を犠牲にする可能性があります。速度アドバンテージメカニズムは、回転コンポーネントや輸送システムを備えた機械などのアプリケーションで一般的に使用されています。
上のビデオは、伸縮式線形アクチュエーター(列揚力がどのように作られているかを示しています)を示しています
特定のタスクまたはアプリケーションに最も適切なメカニズムを選択するためには、各タイプの機械的アドバンテージシステムの長所、短所、およびトレードオフを理解することが重要です。
機械的アドバンテージシステムの基本原則と種類を把握することにより、パフォーマンスを最適化し、効率を改善し、より少ない労力で驚くべき偉業を達成する可能性を解き放つことができます。以下のセクションでは、レバー、プーリー、ギア、油圧など、特定の機械的利点メカニズムをより深く掘り下げ、それらのメカニズム、アプリケーション、および彼らが提供する利点とトレードオフに関するさらなる洞察を調査します。
セクション2:機械的利点メカニズムの調査
このセクションでは、力、距離、速度の優位性の原則を活用するさまざまな機械的利点メカニズムを探ります。これらのメカニズムにより、さまざまなアプリケーションでパフォーマンスと効率が向上することができます。各メカニズムに詳細に飛び込みましょう。
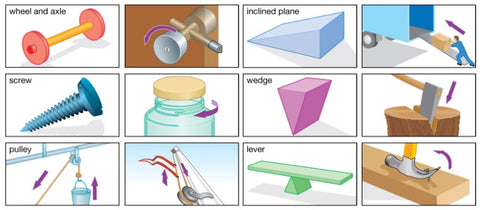
2.1レバーレバーは、最も基本的な機械的アドバンテージメカニズムの1つであり、支点と呼ばれる固定点の周りにピボットする剛性バーまたはビームで構成されています。それらは、支点、入力力(努力)、および出力力(負荷)の相対的な位置に基づいて3つのタイプに分類されます:ファーストクラスレバー、セカンドクラスレバー、およびサードクラスのレバー。
![]()
上記のファーストクラスのレバーオンライン計算機をお試しください
- セカンドクラスレバー:セカンドクラスのレバーでは、支点は一端に配置され、出力力は反対側にあります。入力力は、支点と出力力の間に適用されます。セカンドクラスのレバーは大きな力の利点を提供し、重い負荷を持ち上げることを伴うタスクに適しています。二流のレバーの古典的な例は、手押し車です。
![]()
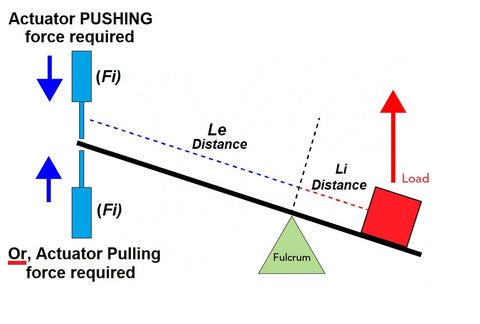
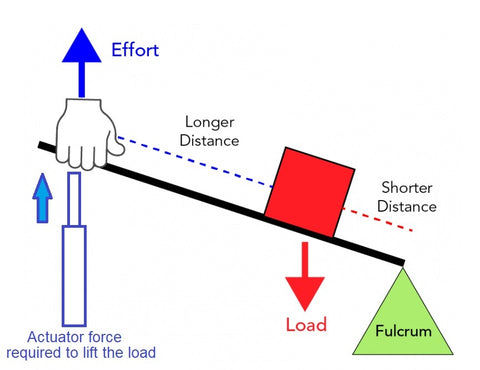
- サードクラスのレバー:サードクラスのレバーでは、支点が一端に配置され、入力力が反対側に適用されます。出力力は、支点と入力力の間にあります。サードクラスのレバーは距離の利点を提供し、可動域または変位の増加を可能にします。サードクラスのレバーの例には、ピンセットと釣り竿が含まれます。
![]() 上記の3番目のクラスのレバーオンライン計算機をお試しください
上記の3番目のクラスのレバーオンライン計算機をお試しください
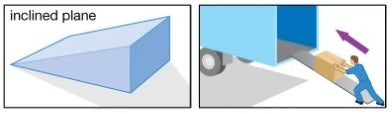
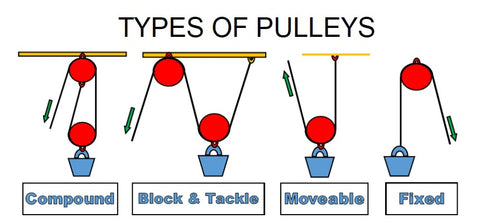
2.2プーリープーリーは、溝付きホイールとケーブルまたはロープで構成される機械装置です。それらは、適用された力の方向を変え、力または距離の観点から機械的な利点を提供するように設計されています。
- 滑車を固定しました:固定された滑車が構造に固定されており、ロープまたはケーブルが車輪を通過します。ロープに適用される努力は、負荷に等しく反対の力をもたらします。固定されたプーリーは、力の観点から機械的な利点を提供しませんが、力の方向を変えて、オブジェクトを垂直または水平に移動する方が便利です。
- 可動プーリー:可動プーリーでは、ロープの一方の端が固定され、プーリー自体が荷重とともに移動します。この配置は、負荷を持ち上げるのに必要な力を効果的に半分にし、力の優位性を提供します。移動可能なプーリーは、クレーンとブロックアンドタックルシステムで一般的に使用されています。
- 複合プーリー:コンパウンドプーリーは、固定されたプーリーと可動プーリーを組み合わせて、さらに大きな機械的利点を提供します。それらは、異なる固定および可動点に取り付けられた複数の滑車を伴い、力の利点を増やすことができます。複合プーリーは、複雑なリフティングシステムと機械によく見られます。
- 拍車ギア:拍車のギアにはまっすぐな歯があり、最も一般的なタイプのギアです。それらは平行シャフト間で動きとパワーを送信し、速度とトルクを正確に制御します。 SPURギアは、サイズと配置に応じて、速度と力の両方の利点を提供できます。
- らせんギア:ヘリカルギアには、ヘリックスパターンに配置された歯が伸びています。この設計により、スパーギアと比較して、よりスムーズで静かな操作が可能になります。ヘリカルギアは、平行シャフト間の電力の伝達に優れており、速度と力の優位性のバランスを提供します。
- ワームギア:ワームギアは、歯付きホイール(ワームギア)と噛み合うねじれたシャフト(ワーム)で構成されています。それらは高ギア比を提供し、リフティングメカニズムやコンベアシステムなど、高トルクと低速を必要とするアプリケーションで一般的に使用されています。
- 油圧ピストン:油圧ピストンは、流体と可動ピストンを含むシリンダーです。ピストンの一方の端に力が加えられると、液体に圧力がかかり、もう一方の端に力を伝えます。油圧ピストンは大きな力の利点を提供し、自動車ブレーキシステムや建設機械などの用途で一般的に使用されています。
- 油圧プレス:油圧プレスは、油圧ピストンを利用して、プレス、パンチ、またはシェーピングなどのタスクの力を増幅します。小さな力を小さなピストン領域に適用することにより、より大きなピストン領域で大きな力を生成することができ、大きな力の利点を提供します。
- 油圧リフト:油圧リフトは、自動車の修理店、エレベーター、および重いオブジェクトを上げたり下げたりする必要がある他のアプリケーションで広く使用されています。油圧ピストンと力の優位性の原理を利用することにより、油圧リフトは相対的な容易さでかなりの負荷を簡単に処理できます。
セクション3:機械的アドバンテージシステムの種類
このセクションでは、3種類の機械的アドバンテージシステムを掘り下げます:フォースアドバンテージ、距離のアドバンテージ、スピードアドバンテージ。各システムは、アプリケーションの特定の要件に応じて、独自の利点とトレードオフを提供します。各システムを詳細に検討しましょう。
3.1フォースアドバンテージシステムは、抵抗を克服したり、重い負荷を持ち上げたりするために適用された力の増幅に焦点を当てています。これらのシステムにより、ユーザーは自分で生成できるものよりも大きな力を発揮できます。ここにいくつかの顕著な力の利点メカニズムがあります:- レバー:レバー、特にセカンドクラスとサードクラスのレバーは、重い物体を持ち上げたり動かしたりするために、適用された力を増幅することにより、力の優位性を提供します。レバーアームが長く、または負荷が支点に近いほど、力の利点が大きくなります。
- プーリー:可動プーリーと複合プーリーシステムは、複数のロープとプーリーに負荷を分配することにより、力の利点を高めます。これにより、重い物体を持ち上げたり移動したりするのに必要な力を大幅に減らすことができます。
- 油圧システム:油圧システムは、力を増幅するために流体の非圧縮性を利用します。小さなピストン領域に小さな力を適用することにより、システムはより大きなピストン領域でより大きな力を生成し、大きな力の優位性を提供します。
フォースアドバンテージシステムは、建設、製造、輸送など、重い持ち上げを含むアプリケーションに最適です。ユーザーは、より少ない労力で抵抗を克服し、効率的で制御された力の適用を達成することができます。
3.2距離アドバンテージシステム距離アドバンテージシステムは、同じ入力力を持つオブジェクトの可動域または変位の増加に焦点を当てています。これらのシステムは、より遠い距離をカバーしたり、より大きな変位を達成することに重点が置かれているアプリケーションで特に役立ちます。いくつかの距離の利点メカニズムを探りましょう。
- レバー:サードクラスのレバーは、入力力を支点に近づけ、出力力をさらに遠くに配置することにより、大きな距離の利点を提供します。それらは、同じ入力力を使用した運動または変位の範囲を広げることができます。
- ギア:さまざまなサイズとアレンジメントのギアを使用して、距離の利点を達成できます。より小さなギアを駆動する大きなギアは、回転速度と可動域の増加につながります。
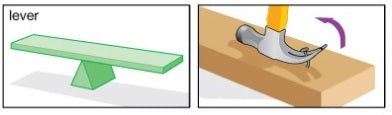
- 傾斜面:ランプなどの傾斜面により、より少ない労力でより長い距離でオブジェクトを移動できます。飛行機に沿って移動する距離を増やすことにより、入力力はより大きな距離にわたって分布し、距離の利点を達成します。
距離アドバンテージシステムは、拡張された動きまたは変位が重要なシナリオでアプリケーションを見つけます。それらは一般に、建設、輸送、スポーツなどの分野で採用されており、そこではより広い範囲または距離を達成することが望まれます。
3.3速度アドバンテージシステム速度アドバンテージシステムは、バランスの取れた力を維持しながら、オブジェクトの速度または速度の向上に焦点を当てています。これらのシステムは、迅速な動きまたは迅速な運用が必要なアプリケーションで価値があります。いくつかのスピードアドバンテージメカニズムを探りましょう。- ギア: さまざまなサイズとアレンジメントのギアを使用して、速度の優位性を実現できます。ギアを大きく走行するギアが小さいため、回転速度が向上し、力出力が減少します。
- プーリー: 固定されたプーリーは、動きの方向を変えることで速度の優位性を提供し、望ましい方向により速い動きを可能にすることができます。ただし、速度の優位性は、力の優位性を犠牲にして達成されます。
- 機械的リンク: クランクロッカーメカニズムやCAMフォロワーシステムなどの機械的リンケージは、回転運動を線形運動に変換し、高速操作を可能にすることができます。
速度アドバンテージシステムは、自動化、ロボット工学、製造などの産業で一般的に見られます。急速な動きを可能にし、全体的な生産性を向上させます。
さまざまな種類の機械的アドバンテージシステムを理解することにより、エンジニア、デザイナー、愛好家が特定の要件に合わせて設計とアプリケーションを最適化することができます。力の優位性、距離の優位性、または速度の優位性を活用することにより、各システムに関連するトレードオフを考慮しながら、望ましい結果を効率的に達成できます。
次のセクションでは、傾斜面、ウェッジ、ネジなどの追加の機械的優位性メカニズムを調査し、それらの実用的なアプリケーションと考慮事項について説明します。
セクション4:機械的利点メカニズムの実用的なアプリケーションと考慮事項
このセクションでは、機械的利点メカニズムの実用的なアプリケーションを調査し、さまざまなシナリオでそれらを実装する際に重要な考慮事項について説明します。これらのアプリケーションと考慮事項を理解することは、機械的アドバンテージシステムを選択および利用する際に、情報に基づいた意思決定を行うのに役立ちます。飛び込みましょう:
4.1レバー: レバーは、さまざまなアプリケーションで広く使用されている多用途の機械的利点メカニズムです。それらは、シーソー、クローバー、ハサミ、さらには人体でも見つけることができます。レバーは、支点、負荷、および努力の位置に基づいて3つのクラスに分類されます。いくつかの一般的なアプリケーションとレバーの考慮事項は次のとおりです。- ファーストクラスレバー: 負荷と努力の間に支点を配置します。例には、はさみとシーソーが含まれます。ファーストクラスのレバーを使用する場合、最適なパフォーマンスを確保するために、努力と負荷のバランスを考慮することが重要です。
- 二流のレバー:セカンドクラスのレバーは、支点と努力の間に負荷が配置されています。例には、手押し車とボトルオープナーが含まれます。セカンドクラスのレバーを使用する場合は、力の優位性を最大化するために、負荷の位置決めを検討してください。
- サードクラスのレバー: サードクラスのレバーには、支点と負荷の間に努力が配置されています。例には、ピンセットと釣り竿が含まれます。 3番目のクラスのレバーは、より広い範囲の動きまたは変位を達成することに重点を置いている場合に一般的に使用されます。

レバーを使用する場合、レバーアームの長さ、負荷と努力の位置、力と距離の優位性のバランスなどの要因は、最適なパフォーマンスを考慮する必要があります。
4.2プーリー: プーリーは、溝付きホイールとロープまたはケーブルを使用して機械的な利点を達成する機械的なデバイスです。それらは、リフティングシステム、クレーン、エレベーター、およびさまざまな産業用途で広く使用されています。プーリーのいくつかの重要な考慮事項とアプリケーションには次のものがあります。
- 滑車を固定しました:固定滑車は、機械的な利点を提供することなく、力の方向を変えます。それらは、システムの力をリダイレクトまたは変化させるためにしばしば使用されます。固定プーリーを実装するときは、操作の滑らかさとプーリー材料の負荷との互換性を考慮してください。
- 可動プーリー:可動プーリーは負荷に取り付けられ、複数のロープ間に負荷を分配することにより、力の利点を提供します。それらは一般的にブロックおよびタックルシステムで使用されます。荷重分布、ロープ強度、および効率的な負荷リフティングに必要な滑車の数を考慮してください。
- 複合プーリー:コンパウンドプーリーは、固定されたプーリーと可動プーリーを組み合わせて、高度な機械的優位性を実現します。彼らは力の優位性を高めますが、より長いロープの長さが必要です。複合プーリーを使用する場合は、システムの複雑さと、延長されたロープの長さに必要なスペースを考慮してください。
プーリーの適切なメンテナンス、ロープまたはケーブルの定期的な検査、およびスムーズな動作の確保は、プーリーシステムの安全性と効率を確保するための重要な要因です。
4.3傾斜面: 傾斜面は、ランプ、階段、スライドなど、さまざまな用途で使用されるシンプルでありながら効果的な機械的利点メカニズムです。それらは、飛行機に沿って移動する距離を増やすことにより、オブジェクトを垂直に移動するために必要な力の量を減らします。傾斜面の考慮事項と応用には次のものがあります。- 負荷重量分布: 傾斜面を使用する場合は、安定性を確保し、事故を防ぐために、負荷の重量分布を検討してください。滑りや滑りを避けるために、荷重と平面面の間の適切な摩擦を維持する必要があります。
- 傾斜角: 傾斜角は、傾斜面の機械的利点に影響します。浅い角度はより少ない力を必要としますが、より長い距離をカバーしますが、急な角度はより多くの力を必要としますが、より短い距離をカバーします。特定のアプリケーション要件に基づいて適切な角度を選択します。
- 摩擦: 摩擦は、傾斜面の効率に重要な役割を果たします。表面材料の種類、潤滑、および荷重と平面間の摩擦に影響を与える可能性のある水分や破片などの外部因子の存在を考えてください。
負荷特性、傾斜角、および摩擦の考慮事項を理解することにより、傾斜面を効果的に利用して、オブジェクトを持ち上げたり動かしたりするのに必要な力を減らすことができます。
4.4ウェッジ:ウェッジは、オブジェクトを所定の位置に分割、切断、または保持するために使用される鋭いエッジを備えた機械的利点メカニズムです。それらは、ナイフ、軸、ノミなどのツールで見つけることができます。ウェッジの考慮事項とアプリケーションには次のものが含まれます。
- 材料の選択:ウェッジに使用される材料は、耐久性と効果的な分割または切断を保証するために重要です。特定のアプリケーション要件に基づいて、ウェッジ材料の硬度、強度、およびシャープネスを考慮してください。
- 角度と力の適用:ウェッジがオブジェクトに駆動される角度は、分割または切断効率に影響します。適用された力とくさびの角度は、オブジェクトやウェッジを損傷することなく、望ましい結果を達成するためにバランスをとる必要があります。
- 安全上の考慮事項: ウェッジを使用する場合、事故を防ぐために適切な安全手順に従うことが不可欠です。適切な保護具、安定した作業面、および適切な取り扱い技術を使用して、個人の安全を確保する必要があります。
ウェッジのプロパティとアプリケーションテクニックを理解することで、適切なツールを選択し、オブジェクトを分割、切断、または固定するための効果的な方法を採用できます。
4.5ネジ:ネジは、回転運動を線形運動に変換する広く使用されている機械的利点メカニズムです。それらは、木工からロボット工学に至るまでのアプリケーションで利用されています。ネジの考慮事項とアプリケーションは次のとおりです。
- ピッチとスレッドのデザイン:ネジのピッチと糸の設計は、機械的利点と必要な力の量を決定する上で重要な役割を果たします。粗いスレッドはより大きな機械的利点を提供しますが、より多くの回転力を必要としますが、細かいスレッドは精度が向上しますが、機械的利点が低くなります。
- トルクと回転方向:ネジは、線形に移動するためにトルクが必要です。トルク、回転力、線形変位の関係を理解することは、望ましい機械的利点を達成するために重要です。特定のアプリケーションに必要な適切な回転方向とトルクを考えてください。
- 材料の互換性:ネジは、鋼、ステンレス鋼、真鍮などのさまざまな材料で利用できます。アプリケーションに適したネジを選択する際の環境条件、負荷要件、および材料の互換性を考慮してください。

適切なアラインメント、定期的なメンテナンス、および負荷要件に基づいた正しいネジの種類とサイズの選択は、最適なパフォーマンスと耐久性を達成するために重要です。
これらの機械的利点メカニズムの実用的なアプリケーションと考慮事項を理解することにより、さまざまなシナリオに効果的に適用して、力、距離、または速度効率を改善できます。各メカニズムには、独自の利点、トレードオフ、および考慮事項があるため、選択を行う前に特定のアプリケーション要件を慎重に評価することが不可欠です。
セクション5:機械的利点メカニズムの実際のアプリケーション
機械的利点メカニズムは、さまざまな業界や分野で広範なアプリケーションを発見しました。このセクションでは、これらのメカニズムの実際的な重要性と影響を強調する実世界の例を探ります。いくつかの注目すべきアプリケーションを掘り下げましょう。
5.1産業および製造部門:産業および製造部門は、効率、生産性、安全性を向上させるための機械的優位性メカニズムに大きく依存しています。いくつかの重要なアプリケーションには以下が含まれます。
- コンベアシステム:プーリーシステムとベルトは、距離を越えて重い荷重を輸送するために、コンベアシステムで広く使用されています。機械的優位性を活用することにより、これらのシステムは移動に必要な力の量を減らし、効率的な材料処理を可能にします。
- 持ち上げおよび材料処理機器:クレーン、ホイスト、フォークリフトには、プーリー、レバー、油圧システムなどの機械的利点メカニズムが組み込まれており、重いオブジェクトを簡単に持ち上げて移動します。これらのシステムは、生産性を向上させ、労働者の身体的負担を軽減します。
- 組立ラインプロセス:機械的利点メカニズムは、生産を合理化するために組み立てラインプロセスに統合されています。レバー、プーリー、ネジを装備したロボットは、正確なポジショニング、締め付け、および組み立て操作を支援し、より速く、より正確な生産をもたらします。
- 建設クレーン: タワークレーンは、プーリーシステムを利用して、重い建設資材を持ち上げて配置します。機械的優位性を採用することにより、これらのクレーンは、努力を減らし、安全性を高めることで、実質的な負荷の動きを可能にします。

- アースモービング装置: 掘削機、ブルドーザー、ローダーは、油圧とレバーシステムを利用して、重い材料を操作し、掘削、持ち上げ、プッシュなどのタスクを実行します。機械的利点メカニズムは、機器の機能を高め、パフォーマンスを最適化します。
- 足場システム:調整可能な足場システムには、作業プラットフォームを上げるか、上昇させるためのネジメカニズムが組み込まれています。機械的利点を活用することにより、労働者は足場の高さを簡単に調整して要件に合わせて、利便性と安全性を確保できます。
- ブレーキシステム: 自動車は、ブレーキシステムでレバレッジメカニズムを採用して、足の圧力を必要なブレーキ力に変換します。これらのシステムは、ドライバーが必要とする努力を減らしながら、効率的な停止電力を提供します。
- サスペンションシステム: サスペンションシステムは、さまざまな機械的利点メカニズムを利用して、ショックを吸収し、安定性を高め、スムーズな乗り心地を確保します。レバーシステム、リンケージ、スプリングは、車両の取り扱いと乗客の快適性を最適化するために協力します。
- パワーステアリング: パワーステアリングシステムには、油圧メカニズムが組み込まれており、ドライバーが努力を減らしてホイールを回すのを支援します。機械的利点を活用することにより、パワーステアリングシステムは操縦性を高め、ドライバーの疲労を軽減します。
- 骨格構造: 人間の骨格システムはレバーシステムとして機能し、機械的な利点を利用して、オブジェクトの歩行、ランニング、リフティングなどの動きを可能にします。骨、関節、筋肉の配置は、力の分布と動きの効率を最適化します。
- 支援デバイス:補綴物と装具は、機械的な利点メカニズムを採用してモビリティを高め、四肢の欠陥を持つ個人をサポートします。これらのデバイスは、レバー、プーリー、およびその他のメカニズムを利用して、紛失または障害のある身体機能を補正します。
- スポーツ用品:ゴルフクラブ、テニスラケット、自転車などのスポーツ用品には、パフォーマンスを最適化するための機械的利点メカニズムが組み込まれています。レバーシステム、ギア比、サスペンションメカニズムは、パワー、速度、効率を最大化するために設計されています。
これらの現実世界の例は、機械的利点メカニズムの幅広いアプリケーションと実際的な重要性を示しています。武力、距離、速度の優位性の原則を活用することにより、産業と分野は生産性、安全性、全体的なパフォーマンスを向上させることができます。
結論:機械的利点メカニズムは、さまざまな業界や分野で非常に貴重なソリューションを提供します。シンプルなツールから複雑な機械まで、これらのメカニズムは力、距離、または速度効率を高め、身体的制限を克服し、驚くべき偉業を達成することができます。
このブログ投稿を通して、レバー、プーリー、傾斜面、ウェッジ、ネジなど、さまざまな種類の機械的優位性メカニズムを調査しました。また、3種類の機械的優位システムについても議論しました。フォースアドバンテージ、距離の優位性、速度の優位性、長所、短所、トレードオフを強調しています。
これらのメカニズムの原則とアプリケーションを理解することにより、ツールを選択したり、システムを設計したり、プロセスを最適化する際に情報に基づいた決定を下すことができます。実用的な例は、製造、建設、自動車、生体力学など、さまざまな業界で機械的優位性メカニズムがどのように利用されるかを示しています。
重い負荷を持ち上げたり、製造の効率を改善したり、そびえ立つ構造を構築したり、人間のモビリティを強化したりするかどうかにかかわらず、機械的利点のメカニズムは、無数の革新と進歩の中心にあります。
そのため、次にレバー、滑車、またはその他の機械的優位性メカニズムに遭遇したとき、彼らが提供する独創的なソリューションと、彼らが私たちの世界を形作る驚くべき方法を理解するために少し時間を取ってください。
機械的利点を理解することは、物理的な力を活用するだけでなく、課題を革新、創造、克服する能力を活用することでもあります。機械的優位性の力を受け入れ、あなたの努力の新しい可能性のロックを解除します。
セクション6:電気線形アクチュエーターの機械的利点
機械的利点は、電気線形アクチュエーターの動作に重要な役割を果たし、力、速度、脳卒中の利点を生成できるようにします。各側面を分解しましょう:
- 力の利点:機械的利点により、電気線形アクチュエーターが負荷に加えられた力を掛けることができます。これは、ギアやネジ糸などのメカニズムを使用することで達成されます。これらのメカニズムは、アクチュエータに適用される有効な入力力を増やすことにより、機械的利点を生み出し、それがより高い出力力を生成します。力の利点は、出力力の入力力の比として計算できます。
たとえば、ネジ駆動の線形アクチュエーターでは、ネジのピッチが力の利点を決定します。より細かいピッチネジは、より高い力の優位性を提供し、アクチュエーターが負荷に大きな押しまたは引っ張り力を生成できるようにします。
- スピードの利点:機械的利点は強制増殖を提供しますが、多くの場合、速度が低下します。ただし、電気線形アクチュエーターは、ギアなどの機械システムを利用して、力と速度のトレードオフのバランスをとることができます。ギア削減システムを組み込むことにより、アクチュエータは出力の速度を上げながら、適用された力を減少させることができます。
速度の利点は、ギア比に依存します。荷重側と比較してアクチュエータのモーター側のギア比が高いと、速度の優位性が得られ、アクチュエータは荷重を高速で動かすことができます。
- ストロークの利点: 電気線形アクチュエータのストロークの利点は、提供できる拡張運動の範囲を指します。アクチュエーターの機械設計を通じて達成され、入力モーションと比較してより長い移動距離が可能になります。これは、リードネジ、ラック、ピニオン、伸縮設計などのメカニズムを使用して実現できます。
要約すると、電気線形アクチュエーターの機械的利点により、力の増殖、速度調整、および拡張ストローク機能が可能になります。ギア、プーリー、ネジ、望遠鏡の設計などのさまざまな機械システムを使用することにより、これらのアクチュエーターは、さまざまなアプリケーション要件に合わせて汎用性の高い範囲の利点を提供できます。
セクション7:機械的利点メカニズムの進歩と将来の傾向
機械的利点メカニズムには、革新と進化の豊かな歴史があり、現代では進歩し続けています。このセクションでは、最近の進歩と機械的優位性メカニズムの新たな傾向のいくつかを調査し、この分野の将来に関する洞察を提供します。
7.1自動化とロボット工学:機械的利点のメカニズムの重要な傾向の1つは、自動化とロボット工学との統合です。技術の急速な進歩により、洗練された機械的アドバンテージシステムを装備したロボットがさまざまなアプリケーション向けに開発されています。これらのロボットは、高精度、効率、適応性を備えた複雑なタスクを実行できます。高度な材料、センサー、およびアクチュエーターを使用することで、オブジェクトを操作し、コンポーネントを組み立て、例外的な器用さと制御を備えた繊細な操作を実行できるロボットシステムを作成できます。
7.2小型化およびマイクロメカニカルシステム:テクノロジーが進むにつれて、より小さく、よりコンパクトな機械的優位性メカニズムに対する需要が高まっています。小型化とマイクロメカニカルシステムの開発により、生物医学工学、エレクトロニクス、マイクロロボティクスなどの分野での革新的なアプリケーションへの道が開かれています。ミニチュアデバイスとシステムにおける機械的優位性の原則を活用すると、マイクロスケールでの正確な操作、センシング、および作動の可能性が開かれます。これらの進歩は、低侵襲手術、マイクロエレクトロメカニカルシステム(MEMS)、ナノテクノロジーなどの用途にとって非常に重要です。 
7.3スマートおよび適応システム:スマートおよびアダプティブテクノロジーと機械的優位性メカニズムの統合は、もう1つのエキサイティングなトレンドです。センサー、アクチュエーター、および制御システムの出現により、機械的利点メカニズムは、リアルタイムで変化する条件に適応し、対応できるようになりました。これにより、パフォーマンス、エネルギー効率、安全性の最適化が可能になります。たとえば、Adaptive Pulley Systemsは、荷重に基づいて構成を自動的に調整し、最適な力伝達と摩耗を最小限に抑えることができます。同様に、インテリジェントレバーシステムは、特定のタスクや動作条件に合わせて機械的利点を動的に変更し、汎用性と有効性を高めます。
7.4添加剤の製造とカスタマイズ:3Dプリントとしても知られる添加剤の製造は、機械的優位性メカニズムの設計と製造に革命をもたらしています。このテクノロジーにより、複雑な形状とカスタマイズされたコンポーネントの作成が可能になり、特定のアプリケーション向けの機械的アドバンテージシステムの最適化が可能になります。 3D印刷により、正確な許容範囲を備えた軽量で複雑なメカニズムの生産を可能にし、材料の廃棄物とアセンブリコストを削減できます。また、複数の機能と機能の統合を単一の印刷コンポーネントに統合し、機械的アドバンテージシステムの効率とパフォーマンスをさらに向上させます。
7.5エネルギー効率と持続可能性:近年、エンジニアリングと設計におけるエネルギー効率と持続可能性に重点が置かれています。機械的利点メカニズムは、これらの目標を達成する上で重要な役割を果たします。タスクの実行に必要な力、距離、または速度を減らすことにより、これらのメカニズムはエネルギー消費を最小限に抑え、効率を最大化します。材料、潤滑技術、および制御システムの進歩は、機械的アドバンテージシステム内の摩擦、摩耗、およびエネルギー損失の減少に貢献します。さらに、再生可能エネルギー源と再生ブレーキシステムの機械的利点メカニズムへの統合は、持続可能で環境に優しいソリューションを達成するための大きな可能性を秘めています。
7.6人間の相互作用と人間工学:共同ロボット工学とヒューマンマシンの相互作用の増加に伴い、人間の人間工学と安全性に優先する機械的利点メカニズムの設計に焦点が合っています。外骨格やウェアラブルデバイスなどの人間の能力を支援および増強するメカニズムは、人間工学に基づいた考慮事項を念頭に置いて開発されています。これらのシステムは、機械的利点メカニズムを利用して、身体的ひずみを軽減し、強度を高め、ユーザーの全体的な快適性を向上させます。さらに、機械的優位性メカニズムに統合された触覚フィードバックシステムは、ユーザーに触覚の手がかりを提供し、さまざまなアプリケーションで制御と安全性を高めます。

私たちが前進するにつれて、これらの進歩と機械的優位性メカニズムの新たな傾向は、産業を形成し、プロセスを変革し、画期的な革新を可能にします。スマートテクノロジー、高度な材料、設計最適化の組み合わせにより、機械的アドバンテージシステムの機能と汎用性がさらに向上します。
セクション8:機械的利点メカニズムの応用
機械的利点メカニズムは、さまざまな業界や分野で広範なアプリケーションを見つけます。このセクションでは、これらのメカニズムが重要な役割を果たし、その重要性と影響を強調する重要な領域のいくつかを探ります。
8.1産業機械と製造: 機械的利点メカニズムは、産業機械および製造プロセスで広く使用されています。これらは、重い負荷の持ち上げ、移動、および容易さと効率の配置を可能にします。クレーン、ホイスト、およびコンベヤーは、プーリーシステムを使用して、力を増やし、材料の取り扱い操作を簡素化します。レバーシステムは、プレス、スタンピングマシン、および機械的プレスで利用され、金属成分を形成および形成するための高い力を生成します。機械的優位性メカニズムによって提供される正確な制御と電力増幅は、製造環境の生産性と安全性を高めます。

8.2建設とエンジニアリング: 建設および工学部門では、さまざまなタスクに機械的な利点メカニズムが不可欠です。それらは、掘削機、ブルドーザー、フォークリフトなどの重機の操作を促進し、効率的な材料の取り扱いと掘削を可能にします。レバーシステムは、重い物体を掘り、持ち上げ、移動するために建設装置で利用されています。プーリーシステムは、クレーンとリフティングデバイスで採用されており、建設材料を盛り上げます。これらのメカニズムは、生産性を向上させるだけでなく、建設運用の安全性と安定性を確保します。
8.3輸送と自動車: 機械的利点メカニズムには、輸送および自動車システムに重要な用途があります。車両では、レバーシステムがブレーキ材および加速メカニズムに使用され、ドライバーに制御と正確な力の適用を提供します。プーリーシステムは、エンジンと送信で採用され、電力を伝達してトルクを掛けます。これらのメカニズムは、車両の効率的な動作に貢献し、スムーズな加速、ブレーキ、ギアのシフトを確保します。さらに、機械的利点メカニズムはサスペンションシステムで重要であり、制御された動きと乗り心地の快適さを強化します。
8.4航空宇宙と航空: 航空宇宙および航空産業は、さまざまなアプリケーションの機械的利点メカニズムに大きく依存しています。航空機では、レバーシステムがフラップ、エルロン、エレベーターなどのコントロール面で使用されているため、パイロットが航空機を正確に操作できるようになります。プーリーシステムは着陸装置のメカニズムに使用され、滑らかで制御された展開と撤回が可能になります。機械的利点メカニズムは、貨物ドア、翼のフラップ、スラストリバーサなどのコンポーネントを作動させる上でも役割を果たします。これらのメカニズムは、航空機システムの安全で効率的な動作に不可欠です。
7.5ヘルスケアと生物医学工学: 機械的利点メカニズムは、ヘルスケアおよび生物医学工学分野で重要な用途を見つけます。補綴デバイスと整形外科インプラントには、多くの場合、レバーシステムが組み込まれて、手足障害のある個人に機動性を提供し、機能を回復します。プーリーシステムは、運動と治療を支援するためにリハビリテーション機器に利用されています。外科的処置では、機械的利点メカニズムにより、外科用具の正確で制御された動きが可能になり、外科医の器用さと精度が向上します。これらのメカニズムは、患者の生活の質の向上と医療を進めることに貢献しています。
8.6スポーツとレクリエーション: 機械的利点メカニズムは、産業および専門的なアプリケーションに限定されません。彼らはまた、スポーツやレクリエーションの活動に存在しています。自転車、エクササイズ機、ローイングデバイスなどのさまざまなスポーツ用品には、パフォーマンスと効率を向上させるための機械的優位性メカニズムが組み込まれています。レバーシステムは、力を増幅し、動きを最適化するためにスポーツ機器で使用されます。プーリーシステムは、ジムマシンと重量挙げ装置で使用され、さまざまな抵抗を提供し、エクササイズを支援します。これらのメカニズムにより、アスリートとフィットネス愛好家は目標をより効果的に達成することができます。
8.7ロボットと自動化: ロボット工学と自動化の急速な進歩により、機械的利点メカニズムはロボットシステムの不可欠なコンポーネントになりつつあります。ロボットは、レバーとプーリーのシステムを使用して人間のような動きを複製し、精度と効率で複雑なタスクを実行できるようにします。機械的利点メカニズムにより、ロボットは重いオブジェクトを持ち上げ、ツールを操作し、複雑な環境をナビゲートできます。これらのメカニズムは、製造、物流、ヘルスケア、探査などの業界におけるロボットの能力を高めます。それらは、生産性の向上、安全性の向上、ロボット工学の分野での可能性の拡大に貢献しています。

セクション9:結論
機械的利点メカニズムのこの包括的な調査では、レバー、プーリー、ギア、ウェッジなど、さまざまな種類のメカニズムを掘り下げました。また、力、距離、速度の3種類の機械的利点システムも検討し、それらの原則とアプリケーションを理解しています。
機械的利点メカニズムは、幅広い産業や日常生活で非常に貴重な利点を提供します。彼らは、力を増やし、距離を増やし、速度を向上させる能力を提供し、身体的な制限を克服し、驚くべき偉業を達成することができます。重いオブジェクトを持ち上げたり、負荷をかけたり、電力を送信したりするかどうかにかかわらず、これらのメカニズムはタスクを簡素化し、効率を向上させ、安全性を高めます。
機械的アドバンテージシステムの長所と短所を考慮すると、各システムに独自のトレードオフと考慮事項があることが明らかになります。力ベースのシステムは、高い力を生成することに優れていますが、距離または速度を犠牲にする可能性があります。距離ベースのシステムは可動域の増加を提供しますが、追加の力が必要になる場合があります。速度ベースのシステムは、急速な動きを可能にしますが、力や距離を犠牲にする可能性があります。特定のアプリケーションの要件を慎重に評価し、それに応じて適切な機械的アドバンテージシステムを選択することが重要です。
テクノロジーが進歩し続けるにつれて、機械的優位性メカニズムのさらなる革新が期待できます。新しい材料や設計の開発から、インテリジェント制御システムの統合まで、未来は刺激的な可能性を保持しています。これらの進歩は、産業に革命をもたらし、日常生活を改善し、人間の可能性の境界を押し広げることができる、さらに効率的で多目的な機械的優位性メカニズムにつながります。
結論として、機械的利点メカニズムは、私たちが現代世界で遭遇する多くの技術的驚異の背後にある原動力です。彼らは、かつて不可能と考えられていたタスクを達成し、複雑なプロセスをより管理しやすくすることを可能にします。
機械的優位性の原則と応用を理解することにより、革新的なソリューションを作成し、生産性を高め、生活の質を向上させる力を活用できます。
したがって、建設現場の大規模なクレーンに驚嘆している場合、自転車のギアシステムの効率を高く評価している場合、または手術ロボットの正確な動きを目撃している場合でも、それをすべて可能にする機械的利点メカニズムの創意工夫であることを忘れないでください。 。機械的優位性の力を受け入れ、無限の可能性の世界を解き放ちます。
参考文献:
- スミス、A。L。、およびバット、N。(2013)。機械的利点とシンプルなマシン。エンジニアリング設計の基礎(第2版、pp。114-148)。プレンティスホール。
- Bove、A。A.(2017)。エンジニアリングの紹介。ニュージャージー:ピアソン教育。



