Cos'è un Arduino?
Arduino è una piattaforma di prototipazione di elettronica open source basata su hardware e software flessibili e facili da usare. È destinato a progetti fai -da -te, artisti, designer, hobbisti e chiunque sia interessato a creare progetti interattivi. Arduinos sono schede di microcontrollore che contengono tutto il necessario per interfacciarsi facilmente con il microcontrollore. Un microcontrollore è come un mini-computer per i sistemi incorporati e il tipo di microcontrollore incluso dipenderà dallo stile di Arduino. Arduino spazia dal più grande Arduino Mega a medie dimensioni Arduino Uno al più piccolo Arduino pro mini. Le diverse schede di dimensioni forniranno un numero crescente di pin I/O e funzionalità aggiuntive e il più popolare di queste schede è l'UNO. Arduino fornisce anche un IDE gratuito open source per utilizzare i microcontrollori. Arduino IDE utilizza un linguaggio di programmazione facile da capire e, a causa della popolarità di Arduino, puoi trovare molti esempi utili online per aiutarti a codificare per la tua applicazione specifica. Se questo è il tuo primo progetto Arduino, il Kit Arduino Ti fornirà tutto ciò di cui hai bisogno dai cavi jumper ai sensori ai relè e include Arduino Uno per iniziare.

Perché usare un Arduino per controllare un attuatore lineare?
Uno dei maggiori vantaggi dell'utilizzo di un Arduino, o qualsiasi microcontrollore per quella materia, per controllare a attuatore lineare è che hai un maggiore controllo sul tuo attuatore lineare. I microcontrollori consentono di utilizzare input più complessi da sensori o altri dispositivi per controllare l'attuatore lineare. Ti consentono di preformare i calcoli in tempo reale per posizionare il tuo attuatore Nella posizione ideale o implementare timer per automatizzare i cambiamenti di posizione degli attuatori. I microcontrollori possono anche assumere feedback dai tuoi attuatori per fornire un controllo più preciso e una velocità, nonché controllare più di un attuatore contemporaneamente. In poche parole, i microcontroller forniscono un maggiore controllo e flessibilità e con il design facile da usare di Arduino e un'ampia popolarità, il livello di complessità aggiuntiva è minimo.
Controllo di un attuatore lineare con un Arduino
Non sarai in grado di interfacciarsi direttamente il tuo attuatore lineare su un Arduino come puoi con un interruttore poiché la tensione operativa dell'Arduino è solo 5 V e ha limiti di corrente molto piccoli. Dovrai utilizzare un componente intermedio per controllare l'attuatore lineare che può essere eseguito utilizzando relè o driver del motore.
Relè
Come discusso Qui, relè sono interruttori elettromagnetici che sono controllati energizzando e de-energizzando una bobina per aprire e chiudere l'interruttore. L'Arduino può essere usato per controllare il relè energizzando ed energizzando la bobina usando un pin I/O. A seconda del tipo di relè che usi cambierà quanto controllo hai sul tuo attuatore lineare, ma l'interfacciarsi con l'Arduino è piuttosto semplice, basta eccitare la bobina con un perno I/O. Dovrai assicurarti che la tensione nominale della bobina sia attorno alla tensione operativa dell'Arduino (5V) o dell'Arduino non sarà in grado di energizzare la bobina abbastanza da far chiudere l'interruttore.
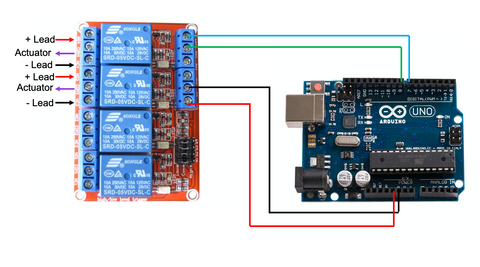
Sopra è un esempio di interfaccia di Arduino con una configurazione di relè SPDT. In questa configurazione, che è descritta qui, i due relè vengono utilizzati per capovolgere la polarità della tensione all'attuatore lineare e scollegare la potenza all'attuatore. Nell'esempio del codice è mostrato di seguito, l'Arduino ecciterà il relè superiore per estendere l'attuatore per 2 secondi impostando il pin 7 a basso, quindi fermare l'attuatore per 2 secondi de-energizzando il relè superiore impostando entrambi i pin in alto. Per ritirare l'attuatore, l'Arduino ecciterà il secondo relè per 2 secondi impostando il pin da 8 a basso, quindi fermare l'attuatore per 2 secondi impostando di nuovo tutti i pin in alto. Poiché questo codice è nella sezione Loop del programma, Arduino continuerà a ripetere questo codice più e più volte. Ovviamente, potresti implementare una soluzione di codifica più elegante per la tua applicazione, ma se stai cercando ancora più controllo, ti consigliamo di utilizzare un driver del motore.
https://gist.github.com/OMikeGray/6bf644b6cda85bfe8c898ccd44ec6d78
Driver del motore
UN Driver del motore è un progetto di circuito integrato specificamente per controllare i motori DC, che guidano attuatori lineari DC. I conducenti motori fanno comunemente uso di un ponte H per consentire sia il controllo di direzione che quella della velocità. Come collegare esattamente il tuo Arduino al driver del motore dipenderà dal driver del motore esatto ma richiederà almeno due pin I/O per farlo e uno di essi sarà un segnale PWM. La modulazione PWM o a larghezza di impulsi è un metodo per variazione di un segnale tra i valori on e OFF per fornire efficacemente una tensione operativa inferiore a quella operativa. Il driver del motore può quindi utilizzare questo segnale per regolare la velocità con cui funziona il motore.
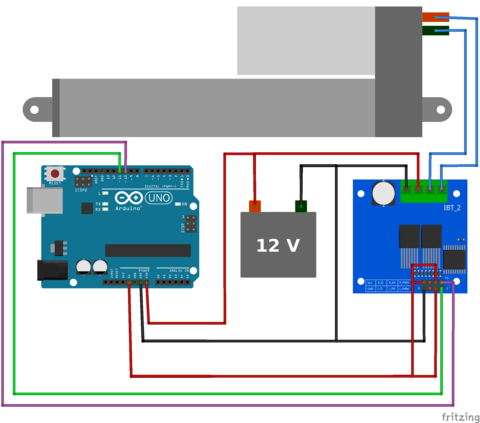
Sopra è un esempio del nostro Azionamento del motore CC ad alta corrente interfacciato con un Arduino. Per questo driver del motore, è necessario inviare due segnali PWM, uno per estendere l'attuatore e l'altro per ritirarsi. Il PWM è dato come un byte non firmato, il che significa che varia da 0, nessuna tensione, a 255, tensione massima (5 V), che sarà proporzionale alla velocità del motore. Poiché PWM non è un valore binario, dobbiamo usare i pin PWM dell'Arduino e utilizzare la funzione di scrittura analogica, come mostrato nell'esempio seguente. I pin PWM saranno indicati sull'Arduino con un ~ o semplicemente etichettato come pin PWM.
https://gist.github.com/OMikeGray/c4e0196704a4d62db5507ad8297708f4
Nell'esempio di codice sopra, l'Arduino estenderà l'attuatore a tutta velocità per due secondi inviando il driver del motore l'intero 5 V dal pin 10 al pin LPWM sul driver del motore. Quindi l'Arduino interrompe l'attuatore non inviando alcun segnale a nessuno dei due pin di ingresso del driver del motore. L'Arduino ritrae quindi l'attuatore a metà velocità inviando il segnale del driver del motore che è a metà e metà dal pin 11 al pin RPWM sul driver del motore. Quindi ferma di nuovo l'attuatore. Poiché questo codice è nella sezione Loop del programma, Arduino continuerà a ripetere questo codice più e più volte. Ancora una volta, è possibile implementare una soluzione di codifica più elegante che si adatta alla tua applicazione, soprattutto se si aggiungono input per controllare l'attuatore.
Aggiunta di input
Una volta che puoi controllare l'attuatore con un Arduino, è possibile implementare gli input su Arduino per una maggiore automazione e controllo. Questi input possono essere interruttori, una vasta gamma di sensori o persino feedback dell'attuatore stesso. Poiché esiste una vasta gamma di opzioni per gli input, come implementarli varieranno ma ci sono alcuni punti generali che dovresti sapere. Se l'input fornisce un input binario, come uno switch, ti consigliamo di utilizzare i pin digitali sull'Arduino, che verranno etichettati sulla scheda o nella scheda tecnica e utilizzare la funzione digitaleRead () nella funzione Arduino ide. Se il tuo dispositivo di input fornisce un segnale analogico, dovrai utilizzare i pin analogici, che verranno etichettati sulla scheda o nella scheda tecnica e utilizzare la funzione Analogread ().



