¿Qué es un Arduino?
Arduino es una plataforma de prototipos electrónicos de código abierto basada en hardware y software flexibles y fáciles de usar. Está destinado a proyectos de bricolaje, artistas, diseñadores, aficionados y cualquier persona interesada en crear proyectos interactivos. Los arduinos son tableros de microcontroladores que contienen todo lo que necesita para interactuar fácilmente con el microcontrolador. Un microcontrolador es como un mini computadora para sistemas integrados y el tipo de microcontrolador incluido dependerá del estilo de Arduino. Arduino varía desde el más grande Mega Arduino a la mediana Arduino Uno a los más pequeños Arduino Pro Mini. Las diferentes tablas de tamaño proporcionarán un número creciente de alfileres de E/S y características adicionales y la más popular de estos tableros es la UNO. Arduino también proporciona un IDE gratuito para usar para programar sus microcontroladores. El Arduino IDE utiliza un lenguaje de programación fácil de comprender y, debido a la popularidad de Arduino, puede encontrar muchos ejemplos útiles en línea para ayudarlo a codificar su aplicación específica. Si este es su primer proyecto Arduino, el Kit de arduino Le proporcionará todo lo que necesita, desde cables de puente hasta sensores hasta relevos e incluye a Arduino Uno para comenzar.

¿Por qué usar un Arduino para controlar un actuador lineal?
Una de las mayores ventajas de usar un Arduino, o cualquier microcontrolador para controlar un actuador lineal es que tienes un mayor control sobre tu actuador lineal. Los microcontroladores le permiten usar entradas más complejas de sensores u otros dispositivos para controlar su actuador lineal. Le permiten preformar los cálculos en tiempo real para posicionar su solenoide en la posición ideal o implementar temporizadores para automatizar los cambios de posición de sus actuadores. Los microcontroladores también pueden recibir comentarios de sus actuadores para proporcionar un control de posición y velocidad más preciso, así como controlar más de un actuador a la vez. En pocas palabras, los microcontroladores le proporcionan un mayor control y flexibilidad y con el diseño fácil de usar de Arduino y una amplia popularidad, el nivel de complejidad adicional es mínimo.
Controlar un actuador lineal con un arduino
No podrá interactuar directamente su actuador lineal a un Arduino como puede con un interruptor, ya que el voltaje operativo del Arduino es de solo 5V y tiene límites de corriente muy pequeños. Deberá usar un componente intermedio para controlar el actuador lineal que se puede hacer usando relés o un controlador de motor.
Relevos
Como se discutio aquí, relevos son interruptores electromagnéticos que se controlan energizando y desenergizando una bobina para abrir y cerrar el interruptor. El Arduino se puede usar para controlar el retransmisión energizando y desenergizando la bobina usando un pasador de E/S. Dependiendo del tipo de retransmisión que use, cambiará la cantidad de control que tiene sobre su actuador lineal, pero interactuar con el Arduino es bastante sencillo, solo energice la bobina con un pasador de E/S. Deberá asegurarse de que el voltaje nominal de la bobina esté alrededor del voltaje de funcionamiento del Arduino (5V) o que el Arduino no pueda energizar la bobina lo suficiente como para que se cierre el interruptor.
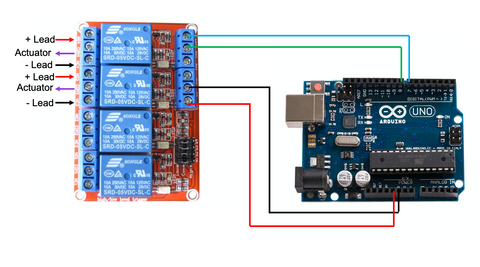
Arriba hay un ejemplo de una interfaz de Arduino con una configuración de retransmisión SPDT. En esta configuración, que se describe aquí, los dos relés se utilizan para voltear la polaridad del voltaje al actuador lineal y desconectar la potencia del actuador. En el ejemplo de código se muestra a continuación, el Arduino energizará el retransmisión superior para extender el actuador durante 2 segundos estableciendo el pin 7 a bajo, luego detendrá el actuador durante 2 segundos desenergizando el relé superior al establecer ambos pines en alto. Para retractar el actuador, el Arduino energizará el segundo relé durante 2 segundos estableciendo el pin de 8 a bajo, luego detener el actuador durante 2 segundos nuevamente configurando todos los pines en alto. Como este código está en la sección del bucle del programa, el Arduino continuará repitiendo este código una y otra vez. Obviamente, podría implementar una solución de codificación más elegante para su aplicación, pero si está buscando aún más control, querrá usar un controlador de motor.
https://gist.github.com/OMikeGray/6bf644b6cda85bfe8c898ccd44ec6d78
Conductor de motor
A conductor de motor es un diseño de circuito integrado específicamente para controlar los motores DC, que impulsan los actuadores lineales de CC. Los conductores del motor comúnmente utilizan un puente H para permitir el control de dirección y velocidad. Cómo conectar exactamente su Arduino a su controlador de motor dependerá del controlador de motor exacto, pero requerirá al menos dos pines de E/S para hacerlo y uno de ellos será una señal PWM. La modulación PWM o ancho de pulso es un método para variar una señal entre los valores ON y OFF para suministrar efectivamente un voltaje inferior a la operación. El controlador del motor puede usar esta señal para ajustar la velocidad a la que funciona el motor.
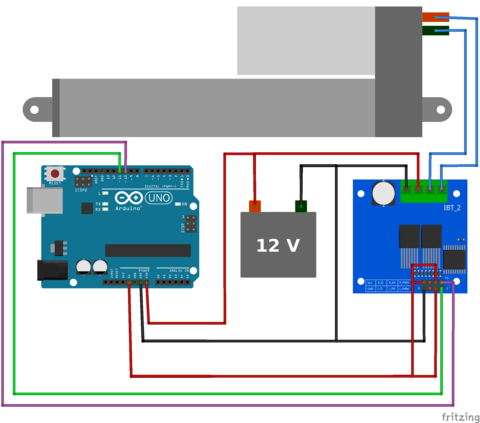
Arriba hay un ejemplo de nuestro Control de motor DC de alta corriente Interfacionado con un Arduino. Para este controlador del motor, debe enviar dos señales PWM, una para extender el actuador y el otro para retraer. El PWM se da como un byte sin firmar que significa que varía de 0, sin voltaje, a 255, voltaje máximo (5V), que será proporcional a la velocidad del motor. Como PWM no es un valor binario, necesitamos usar los pines PWM del Arduino y usar la función de escritura analógica, como se ve en el ejemplo a continuación. Los pines PWM se indicarán en el Arduino con un ~ o simplemente etiquetado como pines PWM.
https://gist.github.com/OMikeGray/c4e0196704a4d62db5507ad8297708f4
En el ejemplo del código anterior, el Arduino extenderá el actuador a toda velocidad durante dos segundos enviando al controlador del motor el 5V completo fuera del pin 10 al pin LPWM en el controlador del motor. Luego, el Arduino detiene el actuador al no enviar ninguna señal al pin de entrada del controlador del motor. El Arduino luego se retrae al actuador a media velocidad enviando la señal del controlador del motor que está a la mitad y la mitad del pin 11 al pin RPWM en el controlador del motor. Luego detiene el actuador nuevamente. Como este código está en la sección del bucle del programa, el Arduino continuará repitiendo este código una y otra vez. Una vez más, podría implementar una solución de codificación más elegante que se adapte a su aplicación, especialmente si agrega entradas para controlar su actuador.
Agregar entradas
Una vez que pueda controlar su actuador con un Arduino, puede implementar entradas en el Arduino para una mayor automatización y control. Estas entradas pueden ser interruptor, una amplia gama de sensores, o incluso retroalimentación del actuador mismo. Como hay una amplia gama de opciones para las entradas, cómo implementarlas variará, pero hay algunos puntos generales que debe saber. Si la entrada proporciona una entrada binaria, como un interruptor, querrá utilizar los pines digitales en el Arduino, que se etiquetará en la placa o en la hoja de datos, y utilizará la función digitalRead () en la función en la función Arduino IDE. Si su dispositivo de entrada proporciona una señal analógica, deberá utilizar los pines analógicos, que se etiquetarán en la placa o en la hoja de datos, y utilizarán la función Analogread ().



