Wat is 'n Arduino?
Arduino is 'n open source elektroniese prototiperingsplatform gebaseer op buigsame, maklik-om-te-gebruik hardeware en sagteware. Dit is bedoel vir DIY -projekte, kunstenaars, ontwerpers, stokperdjies en almal wat belangstel om interaktiewe projekte te skep. Arduinos is mikro -beheerderborde wat alles bevat wat u nodig het om maklik met die mikrobeheerder te koppel. 'N Mikrobeheerder is soos 'n mini-rekenaar vir ingeboude stelsels en die tipe mikrobeheerder wat ingesluit is, sal afhang van die styl van Arduino. Arduino wissel van die groter Arduino Mega tot die middelgrootte Arduino Uno aan die kleiner Arduino Pro Mini. Die verskillende groottesborde sal 'n toenemende aantal I/O -penne en bykomende funksies bied, en die gewildste van hierdie planke is die UNO. Arduino bied ook 'n open source gratis om IDE te gebruik om u mikrobeheerders te programmeer. Die Arduino IDE gebruik 'n maklik verstaanbare programmeringstaal en as gevolg van die gewildheid van Arduino, kan u baie nuttige voorbeelde aanlyn vind om u te help kodeer vir u spesifieke toepassing. As dit u eerste Arduino -projek is, is die Arduino Kit Sal u alles voorsien van alles wat u benodig, van springkabels tot sensors tot relais en sluit Arduino Uno in om aan die gang te kom.

Waarom 'n Arduino gebruik om 'n lineêre aktuator te beheer?
Een van die grootste voordele verbonde aan die gebruik van 'n Arduino, of enige mikrobeheerder vir die saak, om 'n Lineêre aktuator is dat u 'n groter beheer oor u lineêre aktuator het. Mikrobeheerders stel u in staat om meer ingewikkelde insette van sensors of ander toestelle te gebruik om u lineêre aktuator te beheer. Dit stel u in staat om intydse berekeninge te vorm om u te posisioneer aktuator in die ideale posisie of implementeer timers om posisieveranderings van u aktuators te outomatiseer. Mikrobeheerders kan ook terugvoer van u aktuators neem om meer presiese posisie en snelheidsbeheer te gee, sowel as om meer as een aktuator op een slag te beheer. Eenvoudig gestel, mikrobeheerders bied u 'n groter beheer en buigsaamheid en met Arduino se maklike ontwerp en wye gewildheid, is die vlak van bykomende kompleksiteit minimaal.
Beheer van 'n lineêre aktuator met 'n arduino
U kan nie u lineêre aktuator direk met 'n skakelaar met 'n skakelaar direk koppel nie, aangesien die werkspanning van die Arduino slegs 5V is en baie klein stroomperke het. U moet 'n tussenkomponent gebruik om die lineêre aktuator te beheer wat met relais of 'n motorbestuurder gedoen kan word.
Afwerkings
Soos bespreek hier, afwerkings is elektromagnetiese skakelaars wat beheer word deur 'n spoel aan te wakker en te ontketen om die skakelaar oop te maak en toe te maak. Die Arduino kan gebruik word om die relais te beheer deur die spoel met een I/O-pen aan te wakker en te ontketen. Afhangend van die tipe relais wat u gebruik, sal u verander hoeveel beheer u oor u lineêre aktuator het, maar om met die Arduino te skakel, is redelik reguit, en maak die spoel net met 'n I/O -pen aan. U moet toesien dat die nominale spanning van die spoel rondom die werkspanning van die Arduino (5V) is, of dat die Arduino nie die spoel genoeg kan aanwend om die skakelaar te laat sluit nie.
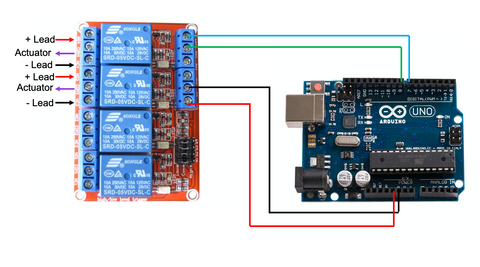
Hierbo is 'n voorbeeld van 'n Arduino -koppelvlak met 'n twee SPDT -afloskonfigurasie. In hierdie konfigurasie, wat hier beskryf word, word die twee relais gebruik om die polariteit van die spanning na die lineêre aktuator te laat draai, sowel as om die krag van die aktuator te ontkoppel. In die kode-voorbeeld word hieronder getoon, sal die Arduino die boonste relais opvoed om die aktuator vir 2 sekondes uit te brei deur pen 7 tot laag te stel, en die aktuator vir 2 sekondes te stop deur die boonste relais te ontklee deur albei penne op te stel. Om die aktuator terug te trek, sal die Arduino die tweede relais vir 2 sekondes aanlok deur pen 8 op laag te stel, en dan die aktuator vir 2 sekondes te stop deur al die penne weer hoog te stel. Aangesien hierdie kode in die lusgedeelte van die program is, sal die Arduino voortgaan om hierdie kode oor en oor te herhaal. Dit is duidelik dat u 'n meer elegante koderingsoplossing vir u toepassing kan implementeer, maar as u op soek is na nog meer beheer, wil u 'n motorbestuurder gebruik.
https://gist.github.com/OMikeGray/6bf644b6cda85bfe8c898ccd44ec6d78
Motorbestuurder
N Motorbestuurder is 'n geïntegreerde stroombaanontwerp spesifiek om DC -motors te beheer, wat DC -lineêre aktueerders dryf. Motordrywers gebruik gereeld van 'n H-brug om rigting- en snelheidsbeheer moontlik te maak. Hoe u u Arduino presies aan u motorbestuurder kan koppel, sal afhang van die presiese motorbestuurder, maar sal ten minste twee I/O -penne benodig om dit te doen, en een van hulle sal 'n PWM -sein wees. PWM- of polswydte-modulasie is 'n metode om 'n sein tussen aan- en uitwaardes te wissel om effektief 'n laer as die werkspanning te lewer. Die motorbestuurder kan dan hierdie sein gebruik om die snelheid waarteen die motor loop, aan te pas.
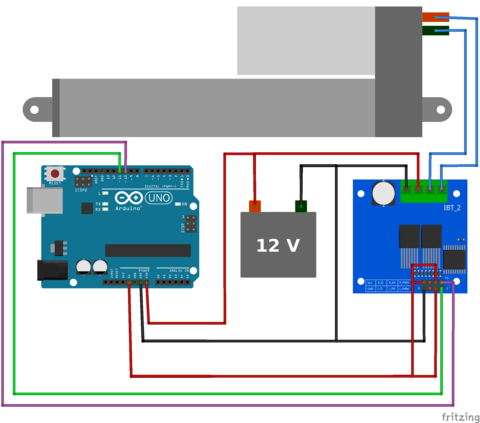
Hierbo is 'n voorbeeld van ons Hoë stroom GS -motoraandrywing met 'n Arduino gekoppel. Vir hierdie motorbestuurder moet u twee PWM -seine stuur, een om die aktuator uit te brei en die ander om terug te trek. Die PWM word gegee as 'n ongetekende byte, wat beteken dat dit wissel van 0, geen spanning, tot 255, maksimum spanning (5V), wat eweredig sal wees aan die snelheid van die motor. Aangesien PWM nie 'n binêre waarde is nie, moet ons die PWM -penne van die Arduino gebruik en die analoog skryffunksie gebruik, soos gesien in die voorbeeld hieronder. PWM -penne sal op die arduino aangedui word met 'n ~ of eenvoudig as PWM -penne gemerk.
https://gist.github.com/OMikeGray/c4e0196704a4d62db5507ad8297708f4
In die kode -voorbeeld hierbo, sal die Arduino die aktuator vir twee sekondes op volle snelheid verleng deur die motorbestuurder die volle 5V uit pen 10 na die LPWM -pen op die motorbestuurder te stuur. Dan stop die Arduino die aktuator deur geen sein na enige insetpen van die motorbestuurder te stuur nie. Die Arduino trek die aktuator dan met 'n halwe snelheid terug deur die motorbestuurssein wat half aan is en die helfte van Pin 11 na RPWM -pen op die motorbestuurder te stuur. Stop dan weer die aktuator. Aangesien hierdie kode in die lusgedeelte van die program is, sal die Arduino voortgaan om hierdie kode oor en oor te herhaal. Weereens kan u 'n meer elegante koderingsoplossing implementeer wat by u toepassing pas, veral as u insette byvoeg om u aktuator te beheer.
Voeg insette by
Sodra u u aktuator met 'n Arduino kan beheer, kan u insette na die Arduino implementeer vir groter outomatisering en beheer. Hierdie insette kan wees skakelaars, 'n wye verskeidenheid sensors, of selfs terugvoer van die aktuator self. Aangesien daar 'n wye verskeidenheid opsies vir insette is, sal die implementering daarvan wissel, maar daar is 'n paar algemene punte wat u moet weet. As die inset 'n binêre invoer bied, soos 'n skakelaar, wil u die digitale penne op die Arduino gebruik, wat op die bord of in die datablad gemerk sal word, en gebruik maak van die digitale lees () -funksie in die Arduino IDE. As u invoerapparaat 'n analoogsein bied, moet u die analoogpennetjies gebruik wat op die bord of in die datablad gemerk sal word, en gebruik maak van die analogread () -funksie.



