Bu proje, bir TV'nin üzerini kaplayan bir tabloyu kaldırmak amacıyla doğrusal bir aktüatörü çalıştırmak için TiVo uzaktan kumandasını ve Arduino kartını nasıl kullanacağınızı gösterir. Videonun sonunda izleyin
Gerekli aletler
Bu projeyi tamamlamak için aşağıdaki araçlara ihtiyaç duyulacaktır.
- #0 yıldız tornavida
- Havya
- Lehim
- Kablo kesiciler
- Küçük pense (Küçük elektroniklerle çalışmak için tasarlanmış pense kullandım)
Parça listesi
Bu projeyi tamamlamak için aşağıdaki parçalara ihtiyaç vardır.
- Ağır Hizmet Palet Aktüatörü Firgelli Otomasyonlar
- TiVo Roamio uzaktan kumanda
- Arduino Uno Rev 3
- Hammond 1591ESBK ABS Proje Kutusu Siyah (7,5” x 4,3” x 2,2”)
- Microtivity IB171 Arduino için 170 noktalı Mini Breadboard
- Kızılötesi Alıcı 2,5–5,5V 38kHz
- 100 adet Michael Josh 20 CM M/F Jumper Teller Kablolar 1 Pin Fiş Erkek Kadın
- SainSmart 2 Kanallı Röle Modülü
- USB 2.0 Kablosu — A-Erkekten B-Erkeğe
- 4 feet 18/5 Siyah Yağmurlama Teli
- 8 adet #4–40 x 2” paslanmaz makine vidası (Onları Home Depot'tan satın aldım)
- 8 adet Everbuilt #4–40 makine vidası somunları (Onları Home Depot'tan satın aldım)
- 16 adet ½” naylon ara parça (Onları Home Depot'tan satın aldım)
- 1 adet fermuarlı kravat
Arduino Uno Rev 3'ün Kurulumu
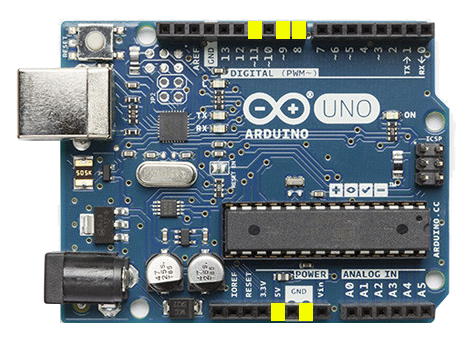
Arduino board üzerinde sarı renkle vurgulanan aşağıdaki pinleri kullanacağız.
- Güç 5V
- Dijital #8
- Dijital #9
- Dijital #11
- Güç GND'si
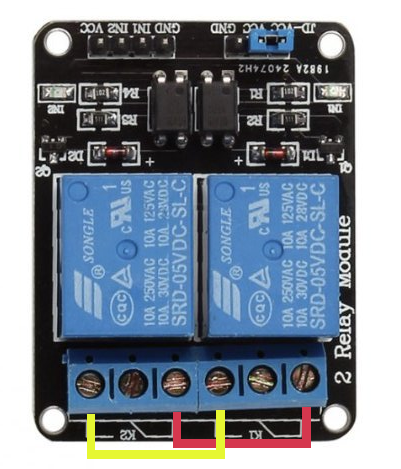
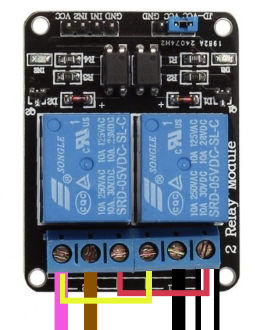
SainSmart 2 kanallı röle modülünün kurulumu
ile çakışması için SainSmart röle modülünü atlamamız gerekiyor. Firgelli Otomasyon doğrusal aktüatör. JD-VCC'den VCC'ye mavi bir atlama kablosu vardır. Bunu olduğu gibi bırakın.
Jumper K1 konum 1'den K2 konum 1'e
K1 rölesinin ilk konumundan K2 rölesinin ilk konumuna kadar bir aktarma kablosu yerleştirin. Jumper'ımız kırmızı renkte gösterilmiştir.

Jumper K1 konum 3'ten K2 konum 3'e
K1 rölesinin üçüncü konumundan K2 rölesinin üçüncü konumuna bir aktarma kablosu yerleştirin. Jumper'ımız sarı renkle gösterilmiştir.

Düzgün bir şekilde atladığınızda aşağıdaki konfigürasyonu görmelisiniz.
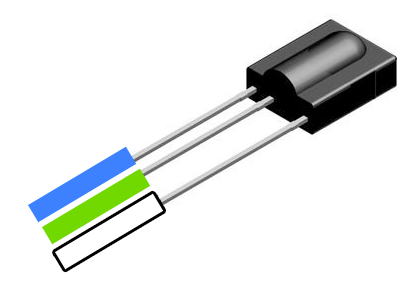
Kızılötesi sensörü ayarlama
Kızılötesi sensörden çıkan üç kablo vardır. Biri topraklama kablosu için, biri 5V güç kablosu için ve üçüncüsü sinyali Arduino kartımıza gönderir.
İçerideki renkli kabloları açığa çıkarmak için 18–5 sprinkler kablosunun dış korumasını beş inç geriye doğru soyun. Sadece yeşil, beyaz ve mavi kabloları kullanacağız, diğerlerini keseceğiz ki onlarla uğraşmak zorunda kalmayalım.
Kullanacağımız her bir kablodaki izolasyonu ⅛” soyun. Bunlar aşağıdaki konfigürasyon kullanılarak röleye lehimlenecektir. Sensöre yuvarlak tümsek size bakacak şekilde üstten baktığınızda:
- Mavi kabloyu sol terminale lehimleyin.
- Yeşil kabloyu orta terminale lehimleyin.
- Beyaz kabloyu sağ terminale lehimleyin.
Doğrusal aktüatörün kablo demetinin ayarlanması
Doğrusal aktüatör, iki üçgen düğmeli kablolu bir uzaktan kumandayla birlikte gelir. Bir düğme, doğrusal aktüatörü yukarı hareket ettiren, diğeri ise aşağı hareket ettiren bir anahtarı etkinleştirir.
Devre kartı uzaktan kumanda gövdesini çıkarın
İlk şey, uzaktan kumandanın arkasındaki kabloları sökmektir. Bunların #0 yıldız tornavidayla çıkarılması gerekecektir.
Devre kartını uzaktan kumanda gövdesinden çıkarın ve kabloları inceleyin. Alttan bakıldığında panele lehimlenmiş dört tel olması gerekir. Aşağıda gösterildiği gibi soldan sağa siyah, beyaz, mor ve kahverengidirler.
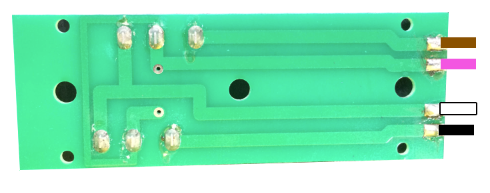
Herhangi bir nedenle farklı renkler kullanmışlarsa, renkleri aşağıdaki sırayla takip etmeniz yeterlidir.
Telleri çözün
Bir havya kullanarak kabloları devre kartından çıkarın. Gevşetmek için havyanın ucunu lehim noktasındaki mevcut lehimin üzerine yavaşça bastırın ve küçük bir pense kullanarak teli lehim noktasından yavaşça çekin.
Kabloları rölelere bağlayın
Şimdi kablolu uzaktan kumandanın kablolarını SainSmart 2 kanallı röleye bağlayacağız. Terminali sökmek için #0 Phillips tornavidayı kullanın ve ardından kabloyu sabitlemek için tekrar sıkın.
- Beyaz kablo K1 pozisyon 1'e gidecek
- Siyah kablo K1 pozisyon 2'ye gidecek
- Kahverengi tel K2 pozisyon 2'ye gidecek
- Mor kablo K2 pozisyonu 3'e gidecek
Not: Mevcut aktarma kablolarını çıkarmayın. Terminalleri vidalarken bunları içeride bırakın.
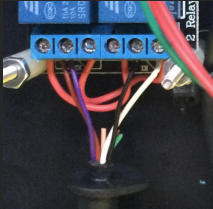
Bittiğinde yukarıdaki resimlerdeki gibi görünmelidir.
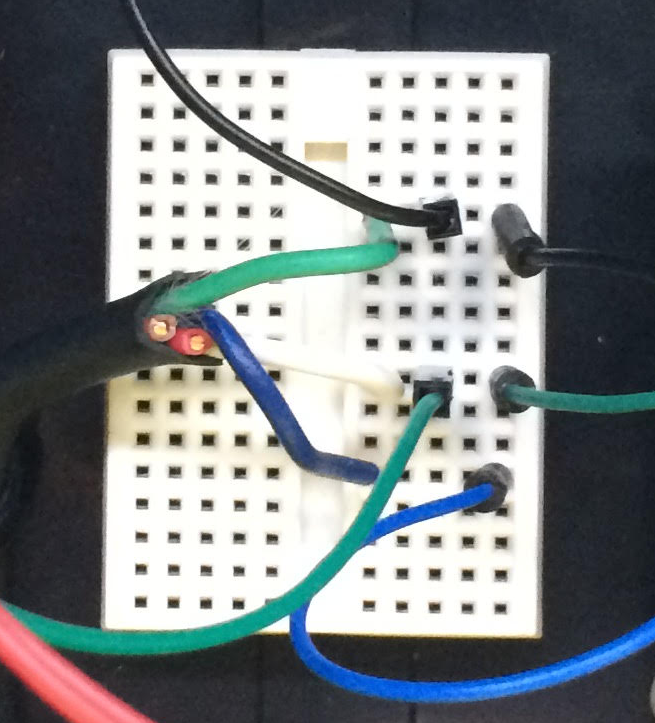
Breadboard'un kablolanması
Şimdi Arduino kartını devre tahtasına bağlayacağız. Breadboard, Arduino'daki veya röledeki bir terminale birden fazla bağlantının yapıldığı yerlerde bağlantıları atlamamızı sağlar.
Her delik sırası birbirine bağlanarak o sıradaki her şeyin üzerinden atlamamızı sağlar. İşte kablolamamız gereken öğeler.
5V güç
- Arduino'daki Güç 5V terminalinden devre tahtasındaki kullanılmayan bir sıraya kadar erkek-dişi bir atlama teli kullanın. Sıradaki bir deliğe itin.
- Devre tahtasının aynı sırasından SainSmart 2 kanallı röle üzerindeki VCC terminaline erkek-dişi bir aktarma kablosu kullanın. Aynı sıradaki bir deliğe itin.
- 18–5 sprinkler kablosunun diğer tarafından beyaz kablonun ¼ inçlik kısmını açığa çıkarın. Aynı sıradaki bir deliğe itin.
Zemin
- Arduino'daki Power GND terminalinden devre tahtasındaki kullanılmayan bir sıraya kadar erkek-dişi bir atlama teli kullanın. Sıradaki bir deliğe itin.
- SainSmart 2 kanallı röle üzerindeki GND terminalinden diğer GND kablosuyla aynı sıradaki deliğe bir erkek-dişi aktarma kablosu kullanın. Aynı sıradaki deliğe itin.
- 18–5 sprinkler kablosunun diğer tarafından yeşil kablonun ¼ inçlik kısmını açığa çıkarın. Aynı sıradaki bir deliğe itin.
Sinyalizasyon
- Arduino'daki Dijital #11 terminalinden devre tahtası üzerindeki kullanılmayan bir sıraya kadar erkek-dişi bir atlama teli kullanın. Sıradaki bir deliğe itin.
- 18–5 sprinkler kablosunun diğer tarafından mavi kablonun ¼ inçlik kısmını açığa çıkarın. Aynı sıradaki bir deliğe itin.
Bittiğinde, devre tahtası aşağıdaki görüntüye benzemelidir.
Kontrol programını Arduino'ya yükleyin
İndirip yüklemeniz gerekecek Arduino IDE'si. IDE'yi indirip yükledikten sonra IDE'yi açın.
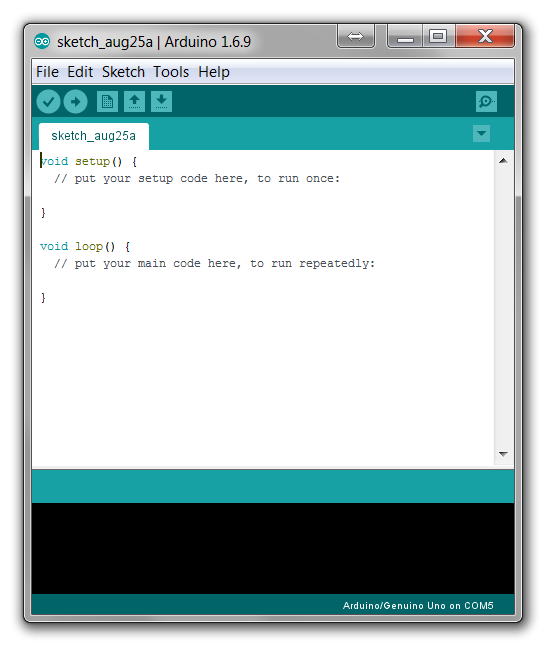
Kodu kopyalayıp IDE'ye yapıştırın
Kaynak kodunu şuradan indirin veya kopyalayın: GitHub ve tamamlandığında böyle görünmesi gereken IDE penceresine yapıştırın.
IRremote.cpp dosyasını ayarlayın
C:\Program Files (x86)\Arduino\libraries\RobotIRremote\src\ dizininde GitHub kaynak kodunun derlenmesini engelleyen bir kaynak kodu sorunu olan bir dosya var. IRremoteTools.cpp dosyasını not defteri gibi basit bir metin düzenleyicide açın ve aşağıdaki satırı değiştirin:
Satır 5 şöyle görünmelidir:
int RECV_PIN = TKD2; // IR alıcının bağlı olduğu pin
Aşağıdaki şekilde değiştirin ve dosyayı kaydedin.
int RECV_PIN = 11; // IR alıcının bağlı olduğu pin
Arduino'yu USB kablosunu kullanarak bilgisayarınıza bağlayın
Arduino'yu, devre tahtasını ve röle kartlarını ahşap masa gibi iletken olmayan bir yüzeye yerleştirin.
USB kablosunun dikdörtgen tarafını bilgisayarınıza ve “D” tarafını Arduino kartına bağlayın.
Bağlantı noktasını seçin
Araçlar – Bağlantı Noktası menü öğesini seçin ve Arduino kartınızı gösteren öğeyi seçin.
Kodu yükle
Kodu Arduino'ya yüklemek için Taslak - Yükle menü öğesini seçin.
Kodu test edin
Kod yüklendikten sonra kablo demetini Firgelli Automations lineer aktüatörünü aktüatöre geri takın ve aktüatörü takın.
Arduino kartını USB kablosuyla bilgisayarınıza bağlı tutun.
TiVo uzaktan kumandanızı kızılötesi sensöre doğrultun ve yeşil renkli "beğen" düğmesine tıklayın. Aktüatör yukarı hareket etmelidir.
TiVo uzaktan kumandanızı kızılötesi sensöre doğrultun ve kırmızı başparmak "beğenmedim" düğmesine tıklayın. Aktüatör aşağı doğru hareket etmelidir.
Hepsini kutuya koy
Devre kartlarımı yerleştirmek için Hammond proje kutusunu makine vidaları, ara parçaları ve makine vidası somunlarıyla birlikte kullandım. Siyah plastik kutuya delikler açmak ve yanlardaki tellere yer açmak için havya üzerinde bir nokta ucu kullandım. Kızılötesi sensörün kablosunun çekilmesini önlemek için fermuarlı bağ kullandım. Kontrol kabloları üzerinde Firgelli Otomasyon lineer aktüatör Çıkarılmalarını önleyecek şekilde tasarlanmış bir lastik parçası vardı, böylece onu kaldırabildim.
Yazar hakkında
Richard Bagdonas, satış noktası, elektronik sağlık kaydı, müşteri ilişkileri yönetimi ve depo yönetimi sistemleriyle entegrasyon konusunda 15 yılı aşkın deneyime sahip bir veri entegrasyonu uzmanıdır. Richard çocukluğundan beri elektronikle ilgileniyor ve bu onun ilk Arduino projesi.
Richard şu anda MI7'de Baş Sağlık Mimarıdır ve şirketin elektronik sağlık kayıt sistemleriyle entegrasyonunu denetlemektedir.



