После того, как вы закончите мигать светодиодами совершенно уникальными и замечательными способами, вам захочется по-настоящему взаимодействовать с физической средой. Вот тут-то и приходят на помощь линейные приводы. Если вы хотите что-то переместить, открыть, повернуть, линейный привод, скорее всего, станет лучшим способом сделать это. И зачем поднимать, перемещать и поворачивать самостоятельно, если для выполнения тяжелой работы можно использовать линейный привод.
Конечно, вы можете нажать кнопку на пульте дистанционного управления или кулисный переключатель, но почему бы не иметь датчик движения или даже часы реального времени для событий, основанных на времени.
Если вы только знакомитесь с Arduino, возможно, вы не знаете, что нельзя просто подключить большой двигатель к контактам платы и начать его перемещать. Вам придется использовать какой-то механизм переключения для выдерживания сильноточной нагрузки. Вы можете использовать драйвер двигателя или H-мост, но самый простой и быстрый способ — использовать пару реле или релейную плату. У вас есть два варианта использования Arduino с линейным приводом. Вы можете просто использовать релейную плату для управления мощностью, поступающей на привод, без информации о положении, или, если вы используете один из приводов с обратной связью FA-PO, вы можете определить положение вала и создать управление положением с замкнутым контуром. В этой статье мы сосредоточимся на более простом варианте, просто используя реле для управления приводом и не используя информацию о положении.
Убедитесь, что вы используете реле (или релейную плату) с реле SPDT. Реле SPDT (однополюсные, двухпозиционные) имеют три соединения для каждого реле. Общий, нормально открытый, нормально закрытый. Мы более подробно расскажем о реле в другой статье, просто убедитесь, что у вас есть реле SPDT, иначе оно не будет работать. Для управления приводом вам понадобятся два реле SPDT. С помощью двух однополюсных реле вы можете запускать, останавливать и изменять направление привода.
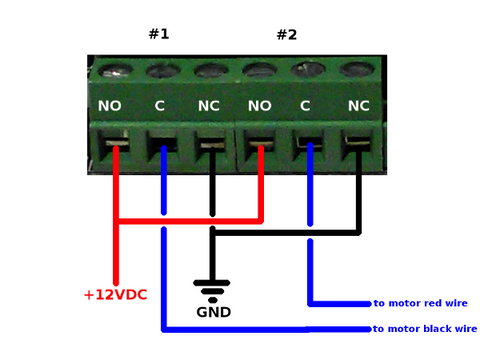
Как вы можете видеть на схеме подключения ниже, вы подключаете заземление 12 В постоянного тока к нормально замкнутой клемме двух реле, а +12 В постоянного тока — к нормально разомкнутой клемме двух реле. Вы можете либо сделать соединение, чтобы разделить каждый провод на две части, либо использовать короткую перемычку. Вы подключаете два провода привода к общей клемме, по одному к каждому реле.
Предположим, что для кода Arduino цифровые контакты 2 и 3 предназначены для управления двумя реле. Вам придется проверить, что находится на вашей доске. Вот простой фрагмент кода, показывающий, как можно выдвигать, втягивать и останавливать линейный привод.
const int RELAY_1_A = 2;
const int RELAY_1_B = 3;
void setup() {
pinMode(RELAY_1_A, OUTPUT);
pinMode(RELAY_1_B, OUTPUT);
} пустота loop() { //This is where your program logic goes //You can call the functions to control the //actuator here, as well as reading sensors, etc.. } пустота расширитьАктуатор(интервал привод) { //Устанавливаем одно реле, а другое выключаем //это приведет к перемещению и выдвижению привода цифровая запись(RELAY_1_A, ВЫСОКИЙ); цифровая запись(RELAY_1_B, НИЗКИЙ); } пустота retractActuator(интервал привод) {
//Выключаем одно реле и включаем другое
//это приведет к втягиванию привода
цифровая запись(RELAY_1_A, НИЗКИЙ);
цифровая запись(RELAY_1_B, ВЫСОКИЙ);
}
пустота стопАктуатор(интервал привод) {
//Выключаем оба реле
//это остановит привод при торможении
цифровая запись(RELAY_1_A, НИЗКИЙ);
цифровая запись(RELAY_1_B, НИЗКИЙ); }Это поможет вам использовать Arduino (или другой микроконтроллер) с реле для управления Firgelli Линейный привод автоматизации.
Если вы ищете, с какого линейного привода начать, позвоните нам или отправьте электронное письмо по нашей технической линии. Если вы ищете надежный привод, обратите внимание на линейные приводы малой мощности мы носим, или Легкие агрегаты с обратной связью по потенциометру. Не забудьте хороший источник питания 12 В постоянного тока, способный выдерживать индуктивную нагрузку. МБ1 кронштейны для линейных приводов (MB1 для серии FA-150) сэкономит вам массу времени и избавит от разочарований.



