360度PWMロータリーエンコーダーブレイクアウト

360度PWMロータリーエンコーダーブレイクアウト
説明
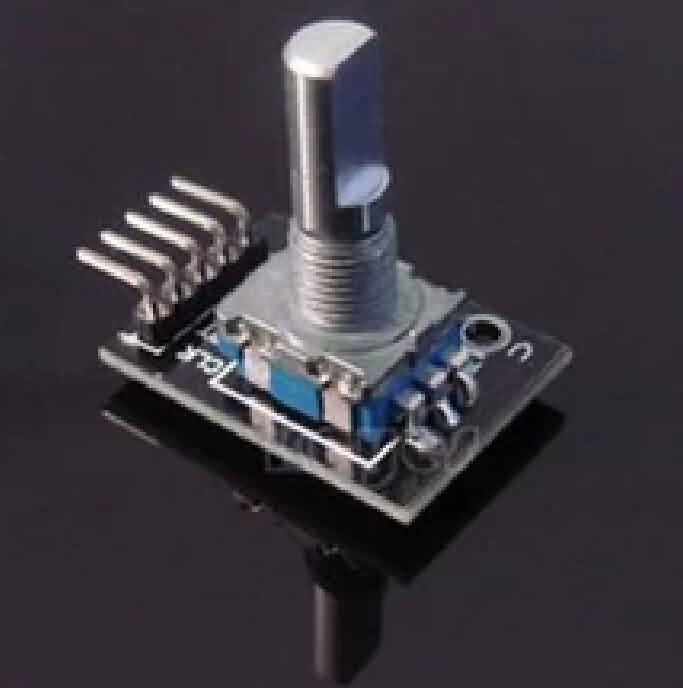
このタイプのスイッチは、インクリメンタルロータリーエンコーダーです。実際のところ、低コストと速度などのモーション関連情報を提供するために簡単に解釈できる信号を提供する能力により、すべての回転エンコーダーの中で最も広く使用されています。
回転することにより、回転エンコーダは、制限をカウントすることなく回転ポテンショメータカウンターとは異なり、回転中に出力パルス周波数を正と逆方向にカウントできます。ロータリーエンコーダーのボタンを使用すると、ゼロから始まる初期状態にリセットできます。
テストコード
int redpin = 2;
int yellowpin = 3;
int greenpin = 4;
int apin = 6;
int bpin = 7;
int buttonpin = 5;
int state = 0;
int longperiod = 5000; //緑または赤での時間
int shortperiod = 700; //変更時の期間
int targetcount = shortperiod;
int count = 0;
void setup()
{
PinMode(Apin、input);
Pinmode(bpin、input);
Pinmode(buttonpin、input);
PinMode(RedPin、出力);
PinMode(YellowPin、出力);
PinMode(GreenPin、出力);
}
void loop()
{
count ++;
if(digitalread(buttonpin))
{
セットライト(高、高、高);
}
それ以外
{
int change = getEncoderturn();
int newperiod = longperiod +(変更 * 1000);
if(newperiod> = 1000 && newperiod <= 10000)
{
longperiod = newperiod;
}
if(count> targetCount)
{
setState();
count = 0;
}
}
遅延(1);
}
int getEncoderturn()
{
// -1、0、または+1を返します
静的int olda = low;
static int oldb = low;
int result = 0;
int newa = digitalread(apin);
int newb = digitalread(bpin);
if(newa!= olda || newb!= oldb)
{
//何かが変わった
if(olda == low && newa == high)
{
result = - (oldb * 2-1);
}
}
olda = newa;
oldb = newb;
返品結果;
}
int setState()
{
if(state == 0)
{
セットライト(高、低、低);
TargetCount = longperiod;
state = 1;
}
else if(state == 1)
{
セットライト(高、高、低);
TargetCount = shortperiod;
state = 2;
}
else if(state == 2)
{
セットライト(低、低、高);
TargetCount = longperiod;
state = 3;
}
else if(state == 3)
{
セットライト(低、高、低);
TargetCount = shortperiod;
state = 0;
}
}
void setlights(int red、int yellow、int green)
{
DigitalWrite(Redpin、Red);
DigitalWrite(イエローピン、イエロー);
DigitalWrite(GreenPin、Green);
}