Questo progetto mostra come sfruttare un telecomando TiVo e una scheda Arduino per gestire un attuatore lineare per sollevare un dipinto che copre una TV. Guarda il video alla fine
Strumenti richiesti
I seguenti strumenti saranno necessari per completare questo progetto.
- #0 Phillips Chartdriver
- Saldatura
- Saldare
- Pinza tagliafili
- Pinzette (ho usato pinze progettate per lavorare con la piccola elettronica)
Elenco delle parti
Le seguenti parti sono necessarie per completare questo progetto.
- Attuatore di binari pesanti da Firgelli Automazione
- TIVO REMOTE CONTROLLO
- Arduino Uno Rev 3
- Hammond 1591esbk ABS Project Box Black (7,5 "x 4,3" x 2,2 ")
- Microtività IB171 Mini Breadboard da 170 punti per Arduino
- Ricevitore a infrarossi 2.5–5,5 V 38kHz
- 100pcs Michael Josh 20cm M/f Cavi da jumper Cavi 1 pin tappo maschio a femmina
- Modulo di relè a 2 canali Sainsmart
- Cavo USB 2.0-da un maschile a B-maschile
- 4 piedi di 18/5 filo di irrigazione nera
- 8 QTY #4–40 x 2 "viti inossidabile (le ho acquistate da Home Depot)
- 8 QTY Ever -Built #4–40 dadi a vite della macchina (li ho acquistati da Home Depot)
- Distanziatori di nylon da 16 qty ½ "(li ho acquistati da Home Depot)
- 1 cravatta zip Qty
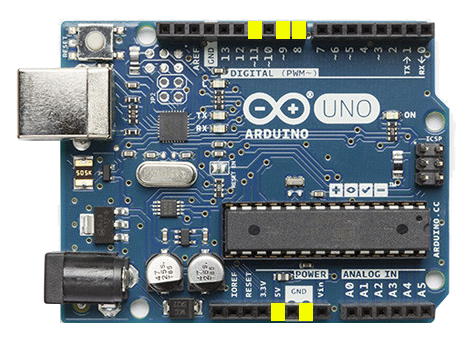
Impostazione dell'Arduino Uno Rev 3
Useremo i seguenti pin sulla scheda Arduino evidenziati in giallo.
- Potenza 5V
- Digital #8
- Digital #9
- Digital #11
- Power GND
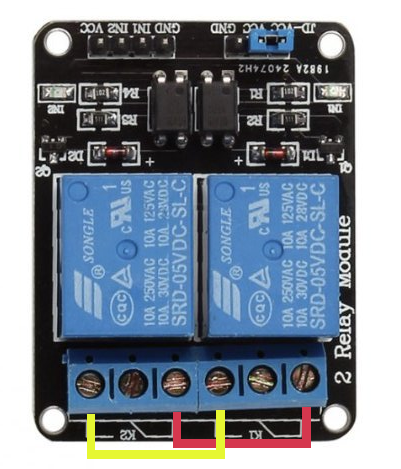
Impostazione del modulo relè a 2 canali Sainsmart
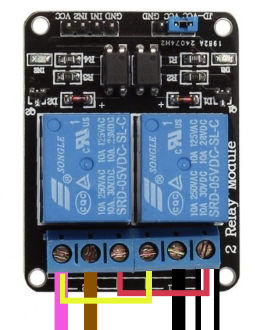
Dobbiamo arricciarsi il modulo relè Sainsmart per coincidere con il Firgelli Attuatore lineare di automazione. C'è un maglione blu da JD-VCC a VCC. Lascialo in posizione così com'è.
Jumper K1 Posizione 1 a K2 Posizione 1
Posizionare un filo jumper dalla prima posizione sul relè K1 alla prima posizione sul relè K2. Il nostro maglione è mostrato in rosso.

Jumper K1 Posizione 3 a K2 Posizione 3
Posizionare un filo jumper dalla terza posizione sul relè K1 alla terza posizione sul relè K2. Il nostro maglione è mostrato in giallo.

Se saltato correttamente, è necessario vedere la seguente configurazione.
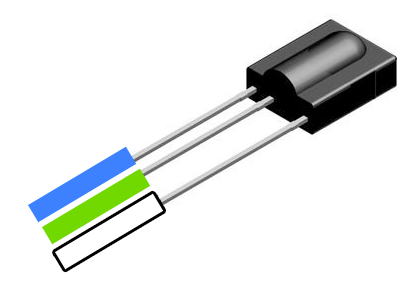
Impostazione del sensore a infrarossi
Il sensore a infrarossi ha tre fili che ne escono. Uno è per un filo di terra, uno è per un filo di potenza da 5 V e il terzo invia il segnale alla nostra scheda Arduino.
Spogliare due pollici dello scudo esterno sul filo di irrigatore 18-5 per esporre i fili colorati all'interno. Useremo solo i fili verdi, bianchi e blu, quindi tagliamo gli altri, quindi non dobbiamo scherzare con loro.
Strizza ⅛ ”dell'isolamento su ciascuno dei fili che useremo. Questi saranno saldati al relè usando la seguente configurazione. Quando si guarda il sensore dall'alto con l'urto rotondo di fronte a te:
- Saldare il filo blu al terminale sinistro.
- Saldare il filo verde al terminale medio.
- Saldare il filo bianco al terminale destro.
Impostazione del cablaggio dell'attuatore lineare
L'attuatore lineare viene fornito con un telecomando cablato con due pulsanti a triangolo. Un pulsante attiva un interruttore che sposta l'attuatore lineare su e l'altro lo sposta.
Rimuovere il corpo del telecomando del circuito
La prima cosa è svitare i fili nella parte posteriore del telecomando. Questi dovranno essere rimossi con un cacciavite Phillips #0.
Rimuovere il circuito dal corpo del telecomando ed esaminare i fili. Guardandolo dal basso dovrebbe avere quattro fili saldati al tabellone. Da sinistra a destra sono neri, bianchi, viola e marroni come mostrato di seguito.
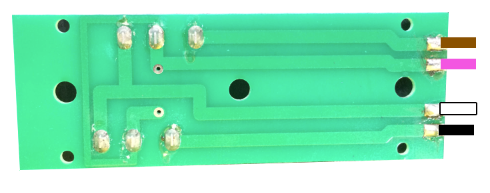
Se per qualche motivo usavano colori diversi, tieni semplicemente traccia dei colori nello stesso ordine di sotto.
Insolente i fili
Usando un saldatore, rimuovere i fili dal circuito. Premi delicatamente la punta della saldatura sulla saldatura esistente sul punto di saldatura per allentarla e usare una piccola coppia di pinze tirando delicatamente il filo dal punto di saldatura.
Attacca i fili ai relè
Ora collegheremo i fili dal telecomando cablato al relè a 2 canali Sainsmart. Utilizzare il cacciavite Phillips #0 per svitare il terminale e quindi serrarlo di nuovo verso il basso per fissare il filo.
- Il filo bianco andrà in posizione K1 1
- Il filo nero andrà in posizione K1 2
- Il filo marrone andrà nella posizione K2 2
- Il filo viola andrà in posizione K2 3
Nota: non rimuovere i fili del jumper esistenti. Lasciarli quando si avvitano i terminali.
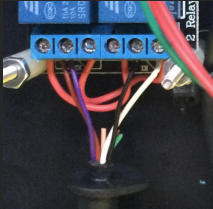
Se fatto dovrebbe sembrare le immagini sopra.
Cablaggio della breadboard
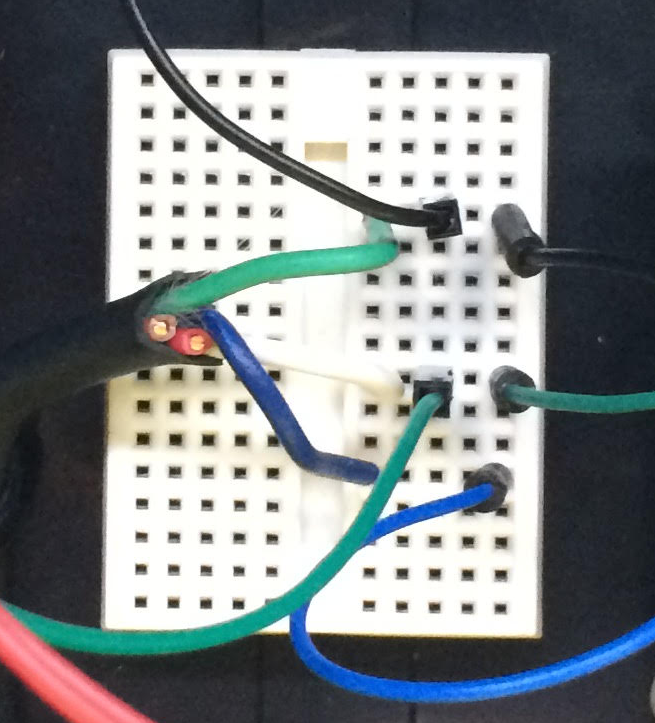
Ora collegheremo la scheda Arduino sulla breadboard. La breadboard ci consente di ponticellare connessioni in cui ci sono più connessioni stabilite a un terminale sull'Arduino o sul relè.
Ogni fila di fori è collegata insieme per permetterci di maglione tutto su quella riga. Ecco gli elementi che avremo bisogno di collegare.
5 V Potenza
- Usa un filo jumper maschio-femmina dal terminale di potenza 5V sull'Arduino fino a una fila inutilizzata sulla breadboard. Spingilo in un buco sulla riga.
- Usa un filo jumper maschio-femmina dalla stessa fila sulla breadboard al terminale VCC sul relè a 2 canali SainSmart. Spingilo in un buco sulla stessa fila.
- Esporre ¼ "del filo bianco dall'altro lato del filo di irrigazione 18-5. Spingilo in un buco sulla stessa fila.
Terra
- Usa un filo jumper maschile dal terminale GND di potenza sull'Arduino fino a una fila inutilizzata sulla breadboard. Spingilo in un buco sulla riga.
- Usa un filo jumper maschio-femmina dal terminale GND sul relè a 2 canali Sainsmart su un foro sulla stessa riga dell'altro filo GND. Spingilo nel foro sulla stessa fila.
- Esporre ¼ "del filo verde dall'altro lato del filo di irrigazione 18-5. Spingilo in un buco sulla stessa fila.
Segnalazione
- Usa un filo jumper maschio-femmina dal terminale digitale n. 11 sull'Arduino fino a una fila inutilizzata sulla breadboard. Spingilo in un buco sulla riga.
- Esporre ¼ "del filo blu dall'altro lato del filo di irrigazione 18-5. Spingilo in un buco sulla stessa fila.
Se fatto la breadboard dovrebbe assomigliare alla seguente immagine.
Installa il programma di controllo su Arduino
Dovrai scaricare e installare il Arduino ide. Dopo aver scaricato e installato l'IDE, apri l'IDE.
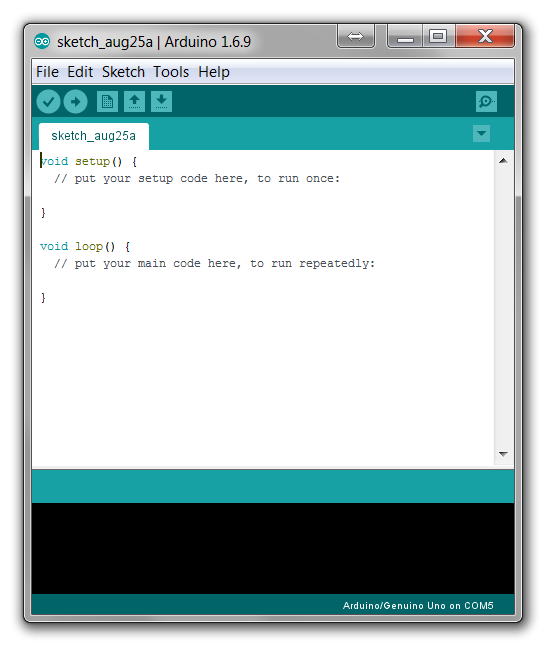
Copia e incolla il codice nell'IDE
Scarica o copia il codice sorgente da Github e incollalo nella finestra dell'IDE che dovrebbe apparire così quando è finito.
Regola il file Irremote.CPP
Esiste un file nella directory C: \ Program Files (x86) \ Arduino \ Libraries \ RobotirRemote \ SRC \ che ha un problema del codice sorgente che impedisce la compilazione del codice sorgente GitHub. Apri il file IrremoteTools.cpp in un semplice editor di testo come Blocco note e modifica la seguente riga:
La riga 5 dovrebbe apparire:
int recv_pin = tkd2; // Il pin il ricevitore IR è collegato
Cambialo su quanto segue e salva il file.
int recv_pin = 11; // Il pin il ricevitore IR è collegato
Collega l'Arduino al tuo computer utilizzando il cavo USB
Posizionare l'Arduino, la breadboard e le schede di relè su una superficie non conduttiva come una scrivania in legno.
Collegare il lato rettangolo del cavo USB al computer e al lato "D" alla scheda Arduino.
Seleziona la porta
Seleziona la voce di menu Strumenti - Porta e seleziona quella che mostra la scheda Arduino.
Carica il codice
Seleziona la voce di menu Sketch - Carica per caricare il codice su Arduino.
Prova il codice
Dopo che il codice è stato caricato, collegare il cablaggio dal Firgelli Autuator Automations di nuovo nell'attuatore e collegare l'attuatore.
Mantieni la scheda Arduino collegata al computer tramite il cavo USB.
Punta il telecomando TiVo sul sensore a infrarossi e fai clic sul pulsante "Mi piace" del pollice verde. L'attuatore dovrebbe salire.
Punta il telecomando TiVo sul sensore a infrarossi e fai clic sul pulsante "antipatia" del pollice rosso. L'attuatore dovrebbe muoversi.
Scatola tutto
Ho usato la scatola di progetto Hammond insieme alle viti della macchina, distanziali e dadi a vite per ospitare i miei circuiti. Ho usato una punta di punti sul saldatore per colpire i buchi attraverso la scatola di plastica nera e fare spazio ai fili attraverso i lati. Ho usato la cravatta a zip per impedire al sensore a infrarossi di essere tirato fuori. I cavi di controllo sul file Firgelli Attuatore lineare di automazione Avere un pezzo di gomma progettato per impedire loro di essere estratti in modo da essere in grado di sfruttarlo.
Circa l'autore
Richard Bagdonas è un esperto di integrazione dei dati con oltre 15 anni di esperienza nell'integrazione con il punto vendita, la cartella clinica elettronica, la gestione delle relazioni con i clienti e i sistemi di gestione del magazzino. Richard ha armeggiato con l'elettronica da quando era un bambino e questo è il suo primo progetto Arduino.
Richard è attualmente capo architetto sanitario presso l'MI7, dove sovrintende all'integrazione dell'azienda con i sistemi di record sanitari elettronici.



