Ce projet vous montre comment tirer parti d'une télécommande Tivo et d'une planche Arduino pour faire fonctionner un actionneur linéaire pour soulever une peinture qui couvre un téléviseur. Regardez la vidéo à la fin
Outils nécessaires
Les outils suivants seront nécessaires pour terminer ce projet.
- # 0 tournevis Phillips
- Fer à souder
- Souder
- Pinces coupantes
- Petites pinces (j'ai utilisé des pinces conçues pour travailler avec une petite électronique)
Liste des pieces
Les parties suivantes sont nécessaires pour terminer ce projet.
- Actionneur de piste lourde de Firgelli Automatisation
- Tivo Roamio Remote Control
- Arduino uno rév 3
- Hammond 1591esbk ABS Project Box Black (7,5 ”x 4,3” x 2,2 ”)
- Microtivité IB171 Mini plan à pain à 170 points pour Arduino
- Récepteur infrarouge 2,5–5,5 V 38 kHz
- 100pcs Michael Josh 20cm M / F Fils de caves
- Module de relais à 2 canaux Sainsmart
- Câble USB 2.0 - A-Male à B-Male
- 4 pieds de fil d'arrosage noir 18/5
- 8 Qté # 4–40 x 2 ”Vis de machine en acier inoxydable (je les ai achetées chez Home Depot)
- 8 Qté Everbuilt # 4–40 écrous à vis à la machine (je les ai achetés chez Home Depot)
- 16 espaceurs en nylon ½ ”(je les ai achetés chez Home Depot)
- 1 cravate de fermeture éclair
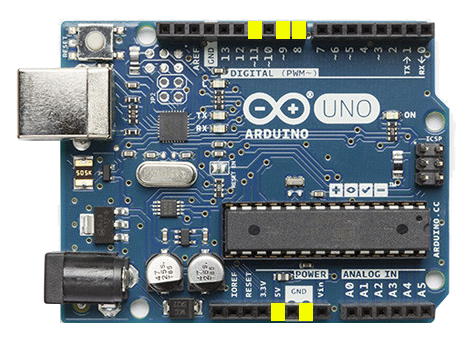
Configuration de l'Arduino Uno Rev 3
Nous utiliserons les épingles suivantes sur la carte Arduino mise en évidence en jaune.
- Power 5V
- Numérique # 8
- Numérique # 9
- Numérique # 11
- Puissance GND
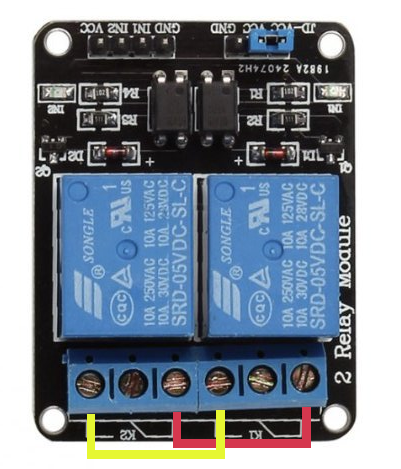
Configuration du module de relais à 2 canaux Sainsmart
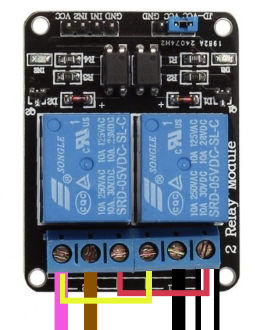
Nous devons faire cacher le module de relais Sainsmart afin de coïncider avec le Firgelli Automations Acteur linéaire. Il y a un sauteur bleu de JD-VCC à VCC. Laissez-le en place tel quel.
Posier K1 Position 1 à K2 Position 1
Placez un fil de cavalier de la première position sur le relais K1 à la première position du relais K2. Notre pull est illustré en rouge.

Posier K1 Position 3 à K2 Position 3
Placez un fil de cavalier de la troisième position du relais K1 à la troisième position du relais K2. Notre pull est illustré en jaune.

Lorsque vous avez correctement sauté, vous devriez voir la configuration suivante.
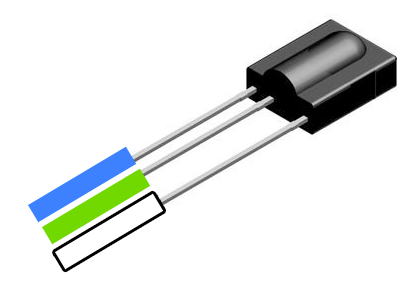
Configuration du capteur infrarouge
Le capteur infrarouge a trois fils qui s'en sortent. L'un est pour un fil de terre, l'un est pour un fil d'alimentation 5V, et le troisième envoie le signal à notre carte Arduino.
Dépuisez deux pouces du bouclier extérieur sur le fil de gicleurs de 18 à 5 pour exposer les fils colorés à l'intérieur. Nous n'utiliserons que les fils verts, blancs et bleus, alors coupez les autres afin que nous n'ayons pas à jouer avec eux.
Déplacer ⅛ ”d'isolation sur chacun des fils que nous utiliserons. Ceux-ci seront soudés au relais en utilisant la configuration suivante. Lorsque vous regardez le capteur du haut avec la bosse ronde face à vous:
- Souder le fil bleu à la borne gauche.
- Souder le fil vert à la borne moyenne.
- Souder le fil blanc à la borne droite.
Configuration du faisceau de câbles de l'actionneur linéaire
L'actionneur linéaire est livré avec une télécommande filaire avec deux boutons de triangle. Un bouton active un commutateur qui déplace l'actionneur linéaire vers le haut et l'autre le déplace vers le bas.
Retirez le corps de télécommande de la carte de circuit imprimé
La première chose est de dévisser les fils à l'arrière de la télécommande. Ceux-ci devront être retirés avec un tournevis Phillips # 0.
Retirez la carte de circuit imprimé du corps de télécommande et examinez les fils. En le regardant par le bas, il devrait avoir quatre fils soudés à la carte. De gauche à droite, ils sont noirs, blancs, violets et bruns comme indiqué ci-dessous.
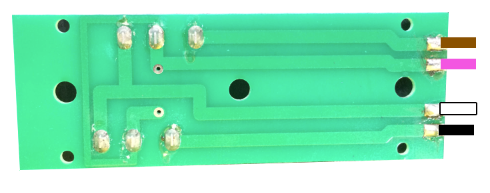
Si pour une raison quelconque, ils ont utilisé différentes couleurs, gardez simplement une trace des couleurs dans le même ordre que ci-dessous.
Fresquez les fils
À l'aide d'un fer à souder, retirez les fils de la carte de circuit imprimé. Appuyez doucement sur la pointe du fer à souder sur la soudure existante sur le point de soudure pour la desserrer et en utilisant une petite paire de pinces tirez doucement le fil du point de soudure.
Fixez les fils aux relais
Nous allons maintenant fixer les fils de la télécommande filaire au relais à 2 canaux Sainsmart. Utilisez le tournevis # 0 Phillips pour dévisser le terminal, puis serrez-le vers le bas pour fixer le fil.
- Le fil blanc ira en position K1 1
- Le fil noir ira en position K1 2
- Le fil brun ira en position K2 2
- Le fil violet ira en position K2 3
Remarque: Ne retirez pas les fils de cavaliers existants. Laissez-les lorsque vous vissez les terminaux.
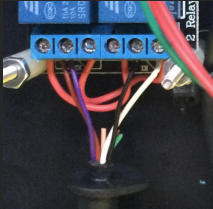
Une fois terminé, cela devrait ressembler aux images ci-dessus.
Câblage dans la planche à pain
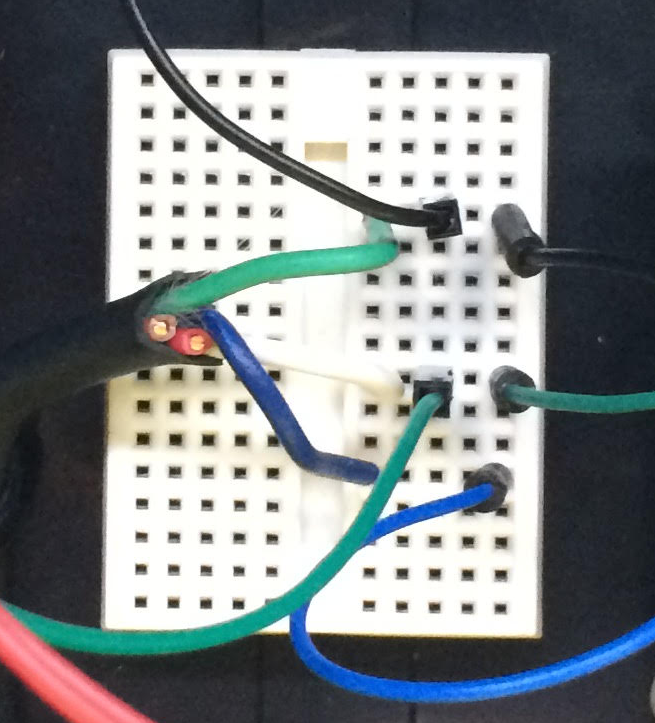
Nous allons maintenant câbler la planche Arduino à la planche à pain. La planche à pain nous permet de cavalier des connexions où il y a plusieurs connexions établies à un terminal sur l'Arduino ou sur le relais.
Chaque rangée de trous est connectée ensemble, ce qui nous permet de tout servir sur cette ligne. Voici les éléments dont nous aurons besoin pour câbler.
Puissance 5V
- Utilisez un cavalier masculin-femelle de la borne Power 5V sur l'Arduino à une rangée inutilisée sur la planche à pain. Poussez-le dans un trou sur la rangée.
- Utilisez un cavalier masculin-femelle de la même ligne sur la planche à pain à la terminale VCC sur le relais à 2 canaux Sainsmart. Poussez-le dans un trou sur la même rangée.
- Exposer ¼ ”du fil blanc de l'autre côté du fil de gicleurs 18 à 5. Poussez-le dans un trou sur la même rangée.
Sol
- Utilisez un cavalier masculin-femelle de la borne Power GND sur l'Arduino à une rangée inutilisée sur la planche à pain. Poussez-le dans un trou sur la rangée.
- Utilisez un câble de cavalier masculin-femelle de la borne GND sur le relais à 2 canaux Sainsmart sur un trou sur la même ligne que l'autre fil GND. Poussez-le dans le trou sur la même rangée.
- Exposer ¼ ”du fil vert de l'autre côté du fil de gicleurs 18 à 5. Poussez-le dans un trou sur la même rangée.
Signalisation
- Utilisez un cavalier masculin-femelle du terminal numérique n ° 11 de l'Arduino à une rangée inutilisée sur la planche à pain. Poussez-le dans un trou sur la rangée.
- Exposer ¼ ”du fil bleu de l'autre côté du fil de gicleurs 18 à 5. Poussez-le dans un trou sur la même rangée.
Une fois terminé, la planche à pain doit ressembler à l'image suivante.
Installez le programme de contrôle sur l'Arduino
Vous devrez télécharger et installer le Arduino ide. Une fois que vous avez téléchargé et installé l'IDE, ouvrez l'IDE.
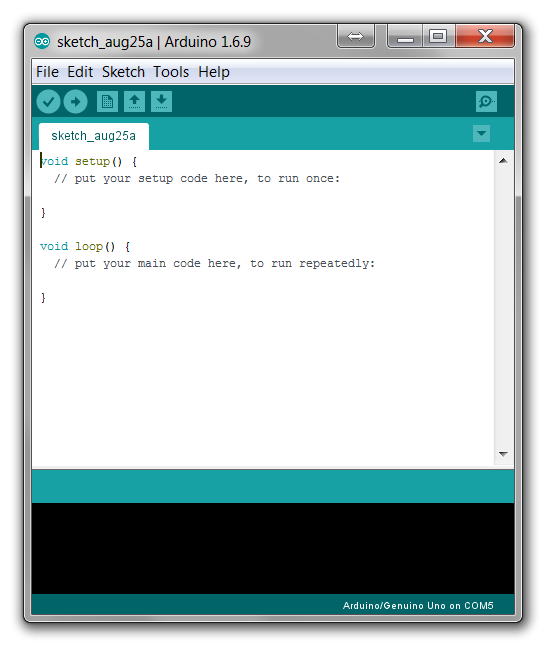
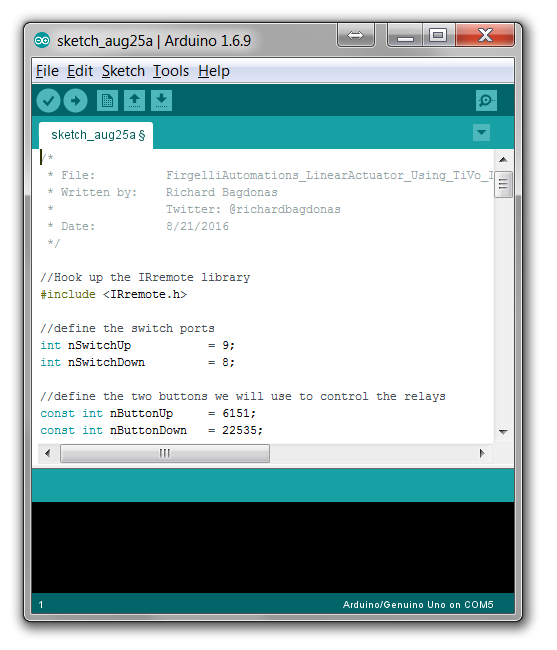
Copiez et collez le code dans l'IDE
Télécharger ou copier le code source depuis Github Et collez-le dans la fenêtre de l'IDE qui devrait ressembler à ceci une fois terminé.
Ajustez le fichier INMEMOTE.CPP
Il y a un fichier dans les fichiers C: \ Program (x86) \ Arduino \ Libraries \ RobotirRemote \ Src \ Directory qui a un problème de code source empêchant le code source GitHub de compiller. Ouvrez le fichier irremoTetools.cpp dans un éditeur de texte simple comme le bloc-notes et modifiez la ligne suivante:
La ligne 5 devrait ressembler:
int recv_pin = tkd2; // La broche à laquelle le récepteur IR est connecté
Changez-le en ce qui suit et enregistrez le fichier.
int recv_pin = 11; // La broche à laquelle le récepteur IR est connecté
Connectez l'Arduino à votre ordinateur à l'aide du câble USB
Placer les planches Arduino, Bridgeboard et Relais sur une surface non conductrice comme un bureau en bois.
Connectez le côté rectangle du câble USB à votre ordinateur et le côté «D» à la carte Arduino.
Sélectionnez le port
Sélectionnez les outils - Élément de menu de port et sélectionnez celui qui affiche votre carte Arduino.
Télécharger le code
Sélectionnez l'élément de menu Sketch - Téléchargez pour télécharger le code sur Arduino.
Tester le code
Une fois le code téléchargé, branchez le faisceau de fil du Firgelli Automations Actionneur linéaire retourne dans l'actionneur et branchez l'actionneur.
Gardez la carte Arduino branchée sur votre ordinateur via le câble USB.
Pointez votre télécommande Tivo au capteur infrarouge et cliquez sur le bouton «Aime» vert. L'actionneur doit monter.
Pointez votre télécommande TiVo au capteur infrarouge et cliquez sur le bouton «déteste» du pouce rouge. L'actionneur doit descendre.
Boxer tout
J'ai utilisé la boîte de projet Hammond avec les vis à vitesses de machine, les entretoises et les écrous à vis à la machine pour abriter mes cartes de circuits imprimées. J'ai utilisé une pointe sur le fer à souder pour percer des trous à travers la boîte en plastique noir et faire de la place pour les fils à travers les côtés. J'ai utilisé la cravate zip pour empêcher le fil du capteur infrarouge de se retirer. Les fils de commande sur le Firgelli Automations ACTUATEUR LINÉAR Ayez un morceau de caoutchouc conçu pour les empêcher d'être retirés afin que j'ai pu le tirer parti.
A propos de l'auteur
Richard Bagdonas est un expert en intégration des données avec plus de 15 ans d'expérience dans l'intégration au point de vente, aux dossiers électroniques de santé, à la gestion de la relation client et aux systèmes de gestion des entrepôts. Richard a bricolé l'électronique depuis qu'il est enfant et c'est son premier projet Arduino.
Richard est actuellement architecte en chef de la santé au MI7 où il supervise l'intégration de l'entreprise avec des systèmes de dossiers de santé électroniques.



