Après avoir fini de clignoter des LED de manière totalement unique et merveilleuse, vous voudrez réellement interagir avec l'environnement physique. Voici où entrent les actionneurs linéaires. Si vous voulez déplacer quelque chose, ouvrez quelque chose, pivotez quelque chose, un actionneur linéaire est probablement la meilleure façon de le faire. Et pourquoi faire le soulèvement, le déplacement, vous pivoter lorsque vous pouvez obtenir un actionneur linéaire pour faire le travail dur.
Bien sûr, vous pouvez appuyer sur un bouton sur une télécommande ou un interrupteur à bascule, mais pourquoi ne pas avoir un capteur de mouvement ou même une horloge en temps réel pour les événements en temps basés sur le temps.
Si vous entrez simplement dans Arduino, vous ne savez peut-être pas que vous ne pouvez pas simplement connecter un gros moteur aux épingles de la planche et commencer à le déplacer. Vous devez utiliser un mécanisme de commutation pour transporter la charge de courant élevée. Vous pouvez utiliser un pilote de moteur ou un pont H, mais le moyen le plus simple et le plus rapide est d'utiliser quelques relais ou une carte de relais. Vous avez deux options lorsque vous utilisez un Arduino avec un actionneur linéaire. Vous pouvez simplement utiliser la carte de relais pour contrôler l'alimentation en allant à l'actionneur sans aucune information de position, ou si vous utilisez l'un des actionneurs de rétroaction FA-PO, vous pouvez déterminer la position de l'arbre et créer un contrôle de position de boucle fermée. Dans cet article, nous allons nous concentrer sur l'option plus simple, en utilisant simplement les relais pour contrôler l'actionneur et aucune information de position.
Assurez-vous d'utiliser des relais (ou une carte de relais) avec des relais SPDT. Les relais SPDT (Double Throw) à un seul poteau ont trois connexions pour chaque relais. Commun, normalement ouvert, normalement fermé. Nous allons entrer plus en détail sur les relais dans un autre article, assurez-vous simplement d'obtenir des relais SPDT, sinon cela ne fonctionnera pas. Vous avez besoin de deux relais SPDT pour contrôler l'actionneur. Avec deux relais SPDT, vous pouvez démarrer, arrêter et changer la direction de l'actionneur.
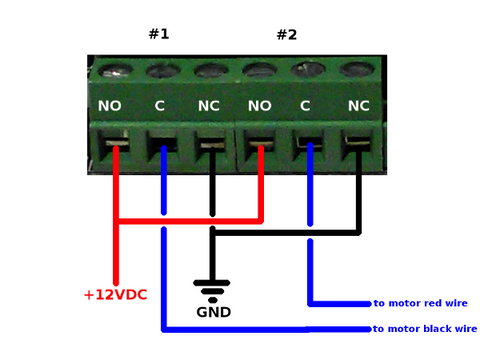
Comme vous pouvez le voir dans le schéma de câblage ci-dessous, vous connectez votre sol 12VDC à la borne normalement fermée des deux relais, et vous connectez votre + 12VDC à la borne normalement ouverte des deux relais. Vous pouvez soit faire une jonction pour diviser chaque fil en deux, soit utiliser un fil de cavalier court. Vous connectez les deux fils d'actionneur à la borne commune, un à chaque relais.
Pour le code Arduino, supposons que les broches numériques 2 et 3 doivent contrôler les deux relais. Vous devrez vérifier ce que c'est sur votre planche. Voici un extrait de code simple montrant comment vous pouvez étendre, retirer et arrêter l'actionneur linéaire.
const int RELAY_1_A = 2; const int RELAY_1_B = 3; void setup() { pinMode(RELAY_1_A, OUTPUT);int actionneur) {pinMode(RELAY_1_B, OUTPUT);} vide loop() { //This is where your program logic goes //You can call the functions to control the //actuator here, as well as reading sensors, etc.. } vide ExtendActuator (int actionneur) {// définir un relais l'un et l'autre OFF // Cela va étendre l'actionneur écriture numérique(Relais_1_a, HAUT); écriture numérique(Relais_1_b, FAIBLE); } vide rétractactuateur (
// Définit un relais et l'autre sur
// Cela va déplacer rétracter l'actionneur
écriture numérique(Relais_1_a, FAIBLE);
écriture numérique(Relais_1_b, HAUT);
}
vide stopactuator (int actionneur) {
// Définit les deux relais
// Cela empêchera l'actionneur en freinage
écriture numérique(Relais_1_a, FAIBLE);
écriture numérique(Relais_1_b, FAIBLE); }
Cela devrait vous amener à utiliser un arduino (ou un autre microcontrôleur) avec des relais pour contrôler un Firgelli Automations Acteur linéaire.
Si vous cherchez quel actionneur linéaire pour commencer, appelez-nous ou envoyez-nous un e-mail sur notre ligne technique. Si vous recherchez un actionneur solide de cheval de bataille, consultez le Actionneurs linéaires de la série de devoirs légers Nous portons, ou le Unités de service léger avec rétroaction du potentiomètre. N'oubliez pas une bonne alimentation 12VDC qui peut gérer les charges inductives. MB1 supports pour actionneurs linéaires (MB1 pour la série FA-150) vous fera gagner beaucoup de temps et de frustration.



