线性执行器速度控制

线性执行器在医疗保健、制造、农业、汽车等各个领域的运营中发挥着关键作用;因此,提高精度和准确度的需求至关重要。线性执行器速度控制器提供最佳控制机制,可根据应用要求以所需速度调节运动。
线性执行器速度控制器的主要功能是调节提供给电动机或执行器的电压输入,同时仍然满足最大力输出能力的负载要求,从而确保动态系统内更高的效率。
控制线性执行器速度需要复杂的机制,例如实施速度控制环,其中涉及从检测位置或速度变化的嵌入式传感器获得的反馈环——这有助于通过校准产生最佳结果。 FIRGELLI的执行器控制板具有自己的内置速度控制反馈回路,可建立最佳的操作条件,同时确保系统进步的精确运动。

FIRGELLI如果您确实需要反馈闭环系统来非常准确地控制速度,则执行器控制板确实有自己的内置速度控制反馈环路。该控制盒只能与内置反馈传感器(例如霍尔传感器或光学传感器)的线性执行器一起使用,因为它需要这些传感器来测量执行器的速度。
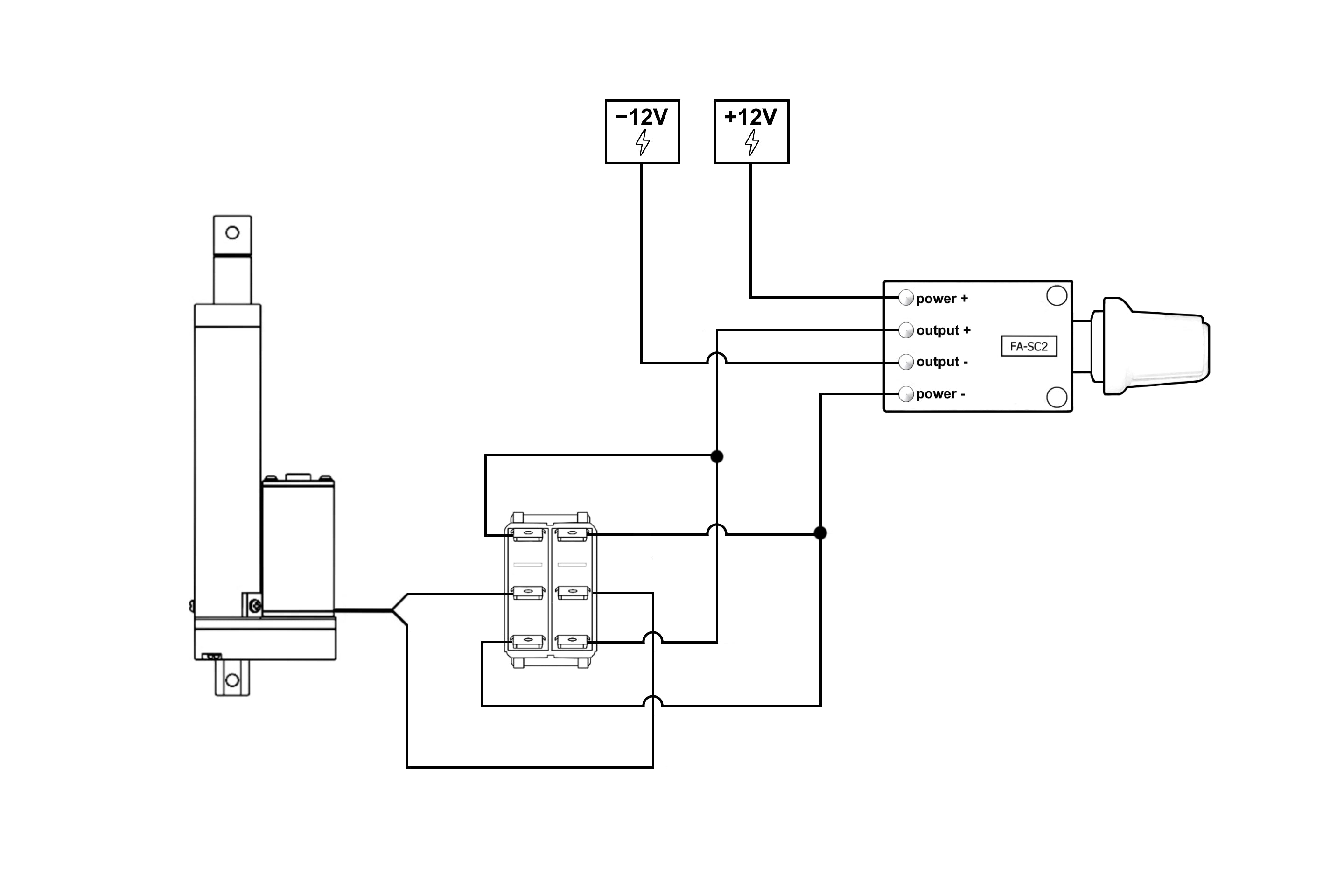
为了确保精度并避免错误,由速度控制器控制的线性执行器会持续监控并重新评估其速度。以下接线图说明了如何将线性执行器连接到摇杆开关和速度控制器,以获得最佳性能和控制。
速度控制器和执行器的接线图
前馈控制
在线性执行器和速度控制的背景下,前馈控制是一个至关重要的概念。这种方法的运行假设是,作为控制器,用户可以准确预测速度控制器的输出并相应地进行任何必要的调整。速度调节控制回路的主要目的是优化执行器的速度,以满足特定任务的要求。如果所有变量保持不变,前馈控制使用户能够根据每秒的传感器值对执行器的占空比与其速度之间的关系做出明智的预测。
通过计算占空比,用户可以准确地获得所需的速度,同时最大限度地减少估计错误。这种方法减轻了过冲和完全错过目标的风险,或者在到达目标之前过早停止的风险,从而破坏了使用线性致动器的基本目标。
直流速度控制器如何控制执行器的速度
利用脉宽调制 (PWM) 的直流速度控制器是一种复杂的电子设备,旨在调节电机的速度。 直流执行器。 PWM 是一种通过以恒定频率快速切换电源来控制提供给直流电机的平均电压的技术。直流执行器的速度可以通过调整每个周期内相对于关闭时间的开启时间(占空比)来调节。
以下概述了使用 PWM 的直流速度控制器如何控制直流执行器的速度:
- 频率: PWM 控制器生成恒定频率的方波信号,该信号由交替的 ON 和 OFF 周期组成。该频率通常足够高,致动器的电机不会感知到切换动作,从而实现平稳的速度控制。
- 占空比: 这 占空比 指单个周期内信号保持ON状态的时间百分比。通过改变占空比,可以控制提供给执行器电机的平均电压。较高的占空比对应于较高的平均电压,从而导致较快的致动器速度,而较低的占空比导致较低的平均电压,从而导致较慢的致动器速度。
- 调制:当用户或自动化系统调整直流执行器的所需速度时,PWM 控制器会相应地修改占空比。这确保了向执行器提供适当的平均电压,从而能够精确控制其速度。
- 效率:由于 PWM 速度控制器在完全打开和完全关闭状态之间快速切换,因此可以最大限度地减少热量形式的能量损失。这使得 PWM 成为控制直流执行器速度的高效方法。
总之,采用 PWM 的直流速度控制器通过生成具有恒定频率和变化占空比的方波信号来工作。通过调整占空比,控制器可以调节提供给直流执行器电机的平均电压,从而可以精确控制其速度,同时保持高能效。
为什么要使用速度控制器?
-
精准控制:速度控制器的主要优点是能够精确控制执行器的速度。 这一功能使人们能够微调执行器的速度,确保其针对当前的特定任务或应用以最佳方式运行。 通过准确地达到所需的速度,您可以提高系统的整体性能和有效性。
-
适应性:不同的应用通常需要不同的速度要求或需要在运行过程中进行调整。这 FIRGELLI 速度控制器使您能够灵活地轻松修改和调整执行器的速度,以满足每个应用的独特需求。这种适应性使工程师能够在不同场景下优化系统性能。
-
运行平稳:速度控制器,特别是那些采用脉冲宽度调制 (PWM) 技术的速度控制器(大多数合适的速度控制器都采用这种技术)具有对执行器速度进行平滑且一致的控制的优势。这种平稳的操作至关重要,因为它可以最大限度地减少执行器上的机械应力和磨损,从而延长其使用寿命。
-
同步:某些应用需要多个执行器之间的同步运动。在这种情况下,速度控制器在保持所有相关执行器速度一致方面发挥着关键作用。这种同步确保了精确的协调和和谐的操作,从而优化了整个系统的性能和功能。
当您将速度调得越来越低时,您从速度控制器中听到的高音调是什么?
当您将速度调得越来越低时,您从速度控制器中听到的尖锐声音通常是由用于调节执行器速度的脉冲宽度调制 (PWM) 技术的开关频率引起的。
PWM 涉及以恒定频率快速打开和关闭电机电源。当速度降低时,占空比(信号处于 ON 状态的时间百分比)降低,导致电机接收到的平均电压减少。在某些情况下,PWM 频率或其谐波可能落在人类听觉范围内(20 Hz 至 20 kHz)。
声音可能是由于速度控制器内的电机线圈或其他组件的振动而产生的,这些组件在 PWM 频率或其谐波下共振。这种振动是由电机线圈在开和关状态之间切换时产生的磁场快速膨胀和收缩引起的。
随着速度降低,占空比减小,并且电机在每个开关周期期间接收到的功率减少。这种功率变化会导致可听噪音变得更加明显。此外,系统的某些谐振频率可能更容易产生可听噪声,具体取决于电机和速度控制器的机械和电气特性。




