360 Derece PWM Rotary Encoder Breakout

360 Derece PWM Rotary Encoder Breakout
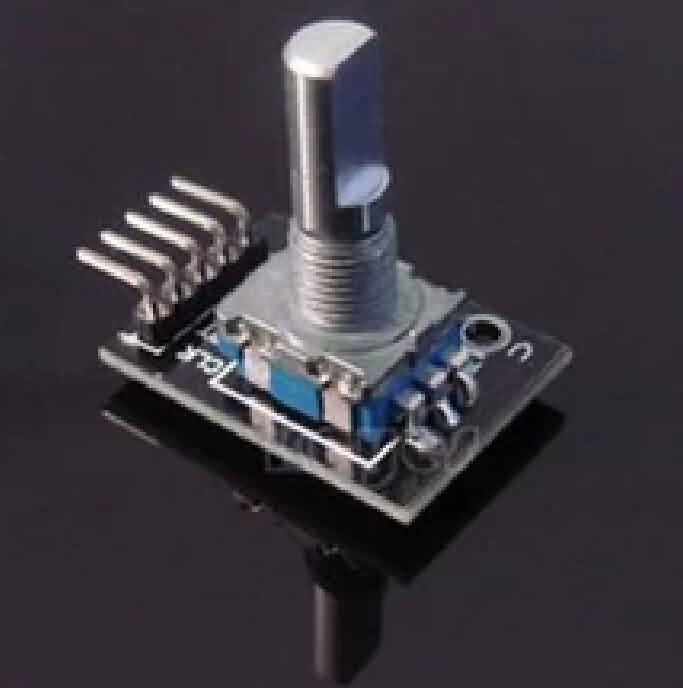
Tanım
Bu tip anahtar artımlı bir döner kodlayıcıdır. Nitekim, düşük maliyeti ve hız gibi hareketle ilgili bilgileri sağlamak için kolayca yorumlanabilecek sinyaller sağlama yeteneği nedeniyle tüm döner kodlayıcıların en yaygın olarak kullanılanıdır.
Dönerek, döner kodlayıcı, sayım sınırlaması olmadan döner bir potansiyometre tezgahının aksine, dönüş darbesi frekansını döndürme sırasında pozitif ve ters yönde sayabilir. Döner kodlayıcıdaki düğme ile sıfırdan başlayarak başlangıç durumuna sıfırlanabilir.
Test kodu
int redpin = 2;
int YellowPin = 3;
int greenpin = 4;
int apin = 6;
int bpin = 7;
int buttonpin = 5;
int durumu = 0;
int longperiod = 5000; // yeşil veya kırmızı zaman zaman
Int ShortPerioD = 700; // Değiştirirken zaman periyodu
int TargetCount = ShortPerioD;
int sayısı = 0;
void kurulumu ()
{
pinmode (apin, giriş);
Pinmode (BPIN, giriş);
pinmode (buttonpin, giriş);
pinmode (Redpin, çıktı);
pinmode (YellowPin, çıktı);
pinmode (greenpin, çıktı);
}
void loop ()
{
sayı ++;
if (digitalread (buttonpin))
{
setlights (yüksek, yüksek, yüksek);
}
başka
{
int change = getEnCoderTurn ();
int newPeriod = longperioD + (Değişiklik * 1000);
if (newPeriod> = 1000 && newPeriod <= 10000)
{
longperiod = newPeriod;
}
eğer (sayım> TargetCount)
{
setState ();
sayım = 0;
}
}
gecikme (1);
}
int getEnCoderTurn ()
{
// dönüş -1, 0 veya +1
statik int olda = düşük;
statik int Oldb = düşük;
int sonuç = 0;
int newa = digitalRead (apin);
int newB = digitalRead (bpin);
if (newa! = Olda || newb! = Oldb)
{
// bir şeyler değişti
if (Olda == düşük && newa == Yüksek)
{
sonuç = - (Oldb * 2 - 1);
}
}
Olda = newa;
OldB = newb;
dönüş sonucu;
}
int setstate ()
{
if (durum == 0)
{
setlights (yüksek, düşük, düşük);
TargetCount = longperiod;
durum = 1;
}
else (durum == 1)
{
setlights (yüksek, yüksek, düşük);
TargetCount = ShortPeriod;
durum = 2;
}
else (durum == 2)
{
setlights (düşük, düşük, yüksek);
TargetCount = longperiod;
durum = 3;
}
else (durum == 3)
{
setlights (düşük, yüksek, düşük);
TargetCount = ShortPeriod;
durum = 0;
}
}
void setlights (int kırmızı, int sarı, int yeşil)
{
DigitalWrite (Redpin, kırmızı);
DigitalWrite (YellowPin, Sarı);
DigitalWrite (Greenpin, yeşil);
}