360 درجة PWM الروتاري التشفير اندلاع

360 درجة PWM الروتاري التشفير اندلاع
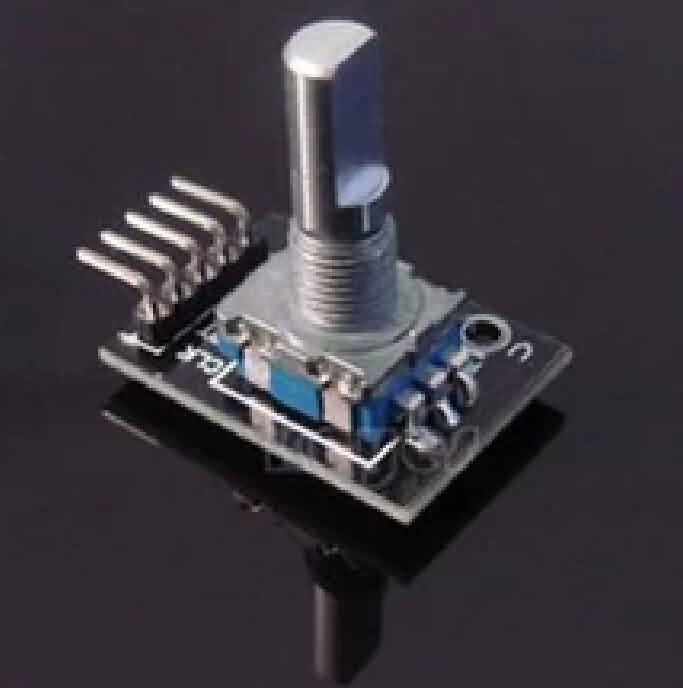
وصف
هذا النوع من المفاتيح هو جهاز تشفير دوار تزايدي. في واقع الأمر، فهو الأكثر استخدامًا على نطاق واسع من بين جميع أجهزة التشفير الدوارة نظرًا لتكلفته المنخفضة وقدرته على توفير إشارات يمكن تفسيرها بسهولة لتوفير معلومات متعلقة بالحركة مثل السرعة.
من خلال الدوران، يمكن للمشفر الدوار حساب تردد النبض الناتج في الاتجاه الموجب والعكسي أثناء الدوران، على عكس عداد الجهد الدوار دون حساب القيود. باستخدام الزر الموجود على جهاز التشفير الدوار، يمكن إعادة ضبطه إلى حالته الأولية بدءًا من الصفر.
رمز الاختبار
كثافة العمليات redPin = 2;
int YellowPin = 3؛
إنت جرينبين = 4؛
إنت أبين = 6؛
كثافة العمليات bPin = 7؛
int ButtonPin = 5;
حالة كثافة العمليات = 0؛
int longPeriod = 5000; // الوقت باللون الأخضر أو الأحمر
فترة قصيرة = 700؛ // الفترة الزمنية عند التغيير
int targetCount = shortPeriod;
عدد صحيح = 0؛
الإعداد باطل()
{
pinMode(aPin, INPUT);
pinMode(bPin, INPUT);
pinMode(buttonPin, INPUT);
pinMode(redPin, OUTPUT);
pinMode(yellowPin, OUTPUT);
pinMode(greenPin, OUTPUT);
}
حلقة فارغة()
{
العد++;
إذا (القراءة الرقمية (زرPin))
{
setLights(HIGH, HIGH, HIGH);
}
آخر
{
int Change = getEncoderTurn();
int newPeriod = longPeriod + (change * 1000);
إذا (فترة جديدة >= 1000 && فترة جديدة <= 10000)
{
longPeriod = newPeriod;
}
إذا (العدد > عدد الأهداف)
{
setState();
العد = 0؛
}
}
تأخير (1)؛
}
إنت getEncoderTurn()
{
// إرجاع -1 أو 0 أو +1
static int oldA = LOW;
static int oldB = LOW;
نتيجة كثافة العمليات = 0؛
int newA = digitalRead(aPin);
int newB = digitalRead(bPin);
إذا (newA != oldA || newB != oldB)
{
// لم يتغير شيء
إذا (oldA == LOW && newA == HIGH)
{
النتيجة = -(oldB * 2 - 1);
}
}
oldA = newA;
oldB = newB;
نتيجة الإرجاع؛
}
إنت سيتستات ()
{
إذا (الحالة == 0)
{
setLights(HIGH, LOW, LOW);
targetCount = longPeriod;
الحالة = 1؛
}
وإلا إذا (الحالة == 1)
{
setLights(HIGH, HIGH, LOW);
targetCount = shortPeriod;
الحالة = 2؛
}
وإلا إذا (الحالة == 2)
{
setLights(LOW, LOW, HIGH);
targetCount = longPeriod;
الحالة = 3؛
}
وإلا إذا (الحالة == 3)
{
setLights(LOW, HIGH, LOW);
targetCount = shortPeriod;
الحالة = 0؛
}
}
مجموعة باطلة من الأضواء (أحمر داكن، أصفر فاتح، أخضر فاتح)
{
الكتابة الرقمية(redPin, red);
الكتابة الرقمية(yellowPin, أصفر);
الكتابة الرقمية(greenPin, green);
}