FA-SYNC-X同步控制板
这 Firgelli 自动化 FA-SYNC-2 和 FA-SYNC-4 同步控制板允许您分别控制最多 2 个和 4 个线性执行器,并确保它们以相同的速度同步移动,无论负载如何。这也将保护您的设计,因为不同步运动可能导致负载或执行器弯曲和损坏。这对于使用多个执行器来移动与活板门、房车车顶升降机和后座舱盖相同的负载的应用来说非常重要。这些板需要具有内部反馈的线性执行器,并且所有线性执行器必须是同一类型、具有相同的行程长度和力。使用不同的线性执行器将无法工作,并且板将无法确保同步运动。有关兼容和不兼容的线性执行器的列表,请查看 FA-SYNC-X 产品页面.
为什么将 FA-SYNC-X 板与 Arduino 结合使用?
利用两者 Arduino FA-SYNC-X 板将让您获得这两个板的优点。与使用 Arduino 相比,您将能够实现更大的自动化 转变 与 FA-SYNC-X 板。虽然您可以使用 Arduino 开发自己的同步控制器,但利用 FA-SYNC-X 板将大大降低 Arduino 代码的复杂性,并确保您的线性执行器同时移动。将这些板结合使用非常适合需要多个线性执行器根据传感器的输入或内部计时器进行移动的应用,例如定位太阳能电池板以获得最大的阳光。

设置和校准
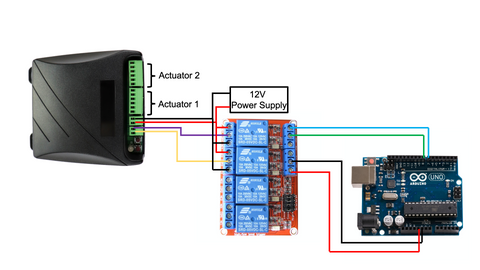
设置 FA-SYNC-X 板 由 Arduino 控制的方式与其他应用程序类似,您应该遵循 用户手册 让这些委员会能够正确地做到这一点。仍然使用 2 个或 4 个 6 针端子块将线性执行器连接到 FA-SYNC-X 板,并连接线性执行器的电源、接地、传感器电源、传感器接地、传感器输出 1 和传感器输出 2 线。线性执行器连接至接线盒中的相应端子。您还可以通过将 12V 或 24V 电源电压连接到 2 针端子块(位于 6 针端子块左侧)中的电源来为 FA-SYNC-X 板供电。您必须确保连接正极和负极引线 电源 连接到正确的输入端子,因为如果翻转,将会对 FA-SYNC-X 板造成永久性损坏。要校准 FA-SYNC-X 板,您仍将遵循与 用户手册 这些板。

连接并校准 FA-SYNC-X 板后,您可以将其与 Arduino 板连接。您仍将使用控制端子块(最左侧的 2 针端子块)控制 FA-SYNC-X 板,但您将使用 Arduino,而不是使用开关或遥控器来控制线性执行器的方向。一个问题是 Arduino 无法提供足够高的输入电压来控制 FA-SYNC-X 板的内部继电器,但我们可以使用 外部继电器 来克服这个问题。就像当 使用 Arduino 控制线性执行器,我们可以利用2个SPDT继电器来控制FA-SYNC-X板。我们需要将每个继电器的 COM 引脚连接到控制端子块的引脚之一,并将每个继电器的常开 (NO) 引脚连接到电源正极,将每个继电器的常闭 (NC) 引脚连接到到供给的负值。您将使用 Arduino 的数字引脚控制这两个外部继电器,如下所示。在这种情况下,您还需要为 继电器板 也使用Arduino。
使用 Arduino 控制 FA-SYNC-X 板
一旦 Arduino 和 FA-SYNC-X 板连接,并且 FA-SYNC-X 板连接并校准到您的线性执行器,您将能够利用 Arduino 的输入来控制它们。虽然 Arduino 读取传感器输入的代码会根据您在应用程序中使用的传感器而有所不同,但控制 FA-SYNC-X 板的代码将相似。控制 FA-SYNC-X 板的代码与使用 Arduino 控制线性执行器的代码非常相似。要扩展线性执行器,您需要将 FA-SYNC-X 板控制端子块上的引脚 A 连接到正电压,同时将引脚 B 接地。要使用 Arduino 执行此操作,您只需通过将该继电器的输入连接到地(因为上面使用的继电器板为低电平有效)来为下部继电器通电,并将引脚 A 连接到正电压。引脚 B 已经接地,因为每个继电器在未按照我们的设置通电时都接地。要缩回线性执行器,您将遵循相同的步骤,但对于引脚 B 除外。您将通电顶部继电器,通过将继电器的控制引脚接地,将引脚 B 连接到正电压。要停止线性执行器,您只需将所有线圈断电,并且引脚 A 和 B 将接地。下面的代码示例显示了用于如上所述延伸、缩回和停止线性执行器的代码。该代码没有展示如何实现用于控制何时停止和移动线性执行器的输入传感器或计时器,因为它会根据所使用的传感器和应用而变化。
缺点
将 FA-SYNC-X 板与 Arduino 结合使用的最大缺点是 Arduino 本身不知道线性执行器的确切位置。由于发送到 FA-SYNC-X 板的反馈不与 Arduino 共享,因此它无法准确了解执行器的位置。这可能会限制您对线性执行器的自动化和控制水平,因为您将无法根据反馈来定位它们,尽管如果您只是完全伸展和缩回线性执行器,这不是问题。克服这个问题的最简单的解决方案是估计执行器每毫秒移动多远,并使用 Arduino 的 millis() 内部计时器根据执行器运行的总时间来估计位置,尽管这不会为您提供精确的定位。如果您确实需要精确的位置,您可以通过在设计中添加外部反馈元素(例如外部线性电位器,向 Arduino 提供反馈。

概括
虽然使用有一些缺点 FA-SYNC-X 板 与 Arduino,它们可能不是您设计中的问题。结合使用这些板,您将能够确保多个线性执行器同时移动,而不管负载如何,并具有更高的自动化水平。相互结合使用这些板非常适合需要使用多个线性执行器来移动单个负载并且希望根据计时器或传感器输入自动执行移动的应用。



