在你以完全独特和美妙的方式完成闪烁 LED 灯之后,你就会想和物理环境互动。 这里是线性致动器进来的地方 如果你想移动一些东西,打开一些东西,旋转一些东西,线性致动器最有可能是最好的方法。 为什么升降,移动,枢转,当你能得到一个线性致动器来做硬的工作。
确保您可以按下遥控器或摇杆开关上的按钮,但为什么没有基于时间的事件的运动传感器,甚至是实时时钟。
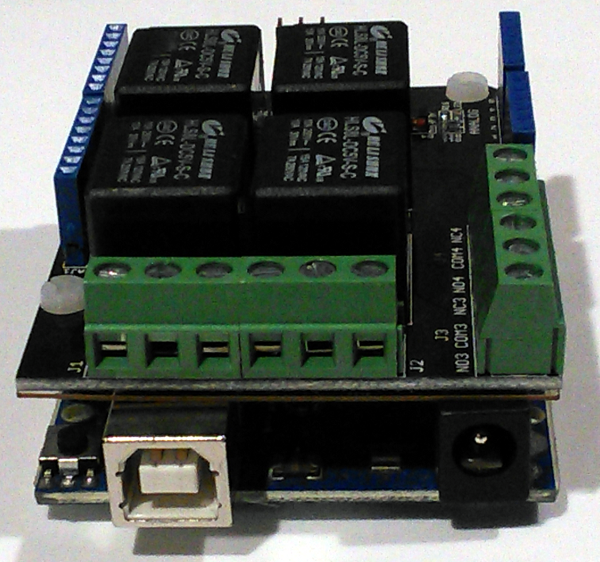
如果你刚进入 Arduino,你可能不知道你不能把一个大电机连接到板的引脚上,开始移动它。 您必须使用一些切换机制来承载高电流负载。 您可以使用电机驱动器或 H 桥,但最简单,最快的方式是使用耦合继电器或继电器板。 使用带有线性致动器的 Arduino 时,您有两个选项。 您只需使用中继板来控制转至没有位置信息的执行器的电源,或者如果您使用其中一个 FA-PO 反馈执行器,就可以确定轴位置并创建闭环位置控制。 在本文中,我们将关注更简单的选项,只需使用中继系统来控制执行器,而不使用位置信息。
确保使用带有 SPDT 中继系统的中继系统 ( 或中继板 ) 。 SPDT (单杆双掷) 继电器每个继电器有三个连接。 公用,通常打开,通常关闭。 我们将深入了解另一篇文章中的中继系统,确保您获得 SPDT 中继系统,否则将无法工作。 您需要两个 SPDT 中继系统来控制驱动器。 通过两个 SPDT 中继系统,您可以启动,停止和更改驱动器的方向。
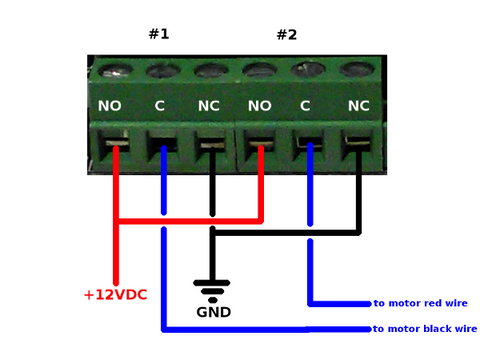
正如您在下面的连线图中看到的,您将 12VDC 接地连接到两个中继设备的正常关闭终端,并将您的 +12VDC 连接到两个中继设备的正常打开的终端。 您可以进行联结以将每个导线一分为二,或者使用短跳线。 将两个驱动器连线连接到公共终端,一个连接到每个中继设备。
对于 Arduino 代码,我们假设数字引脚 2 和 3 是控制两个继电器。 你得检查一下你的板上是什么 以下是一个简单的代码片段,显示您可以如何扩展,收缩和停止线性致动器。
const int RELAY_1_A = 2; const int RELAY_1_B = 3; void setup() { pinMode(RELAY_1_A, OUTPUT);国际 驱动器 ) {pinMode(RELAY_1_B, OUTPUT);} 空 loop() { //This is where your program logic goes //You can call the functions to control the //actuator here, as well as reading sensors, etc.. } 空 extendActuator(国际 致动器) { //设置一个中继系统,而另一个中继系统将移动驱动器 数字写( RELAY_1_A, HIGH); 数字写( RELAY_1_B, LOW); } 空 撤回数据器 (
//将一个中继设置为 off ,另一个设置为
//这将移动收回器
数字写( RELAY_1_A, LOW);
数字写( RELAY_1_B, HIGH);
}
空 stopActuator (国际 驱动器 ) {
//将两个中继系统关闭
//这将在制动时停止致动器
数字写( RELAY_1_A, LOW);
数字写( RELAY_1_B, LOW); }
这应该让您继续使用带有中继系统的 Arduino (或其他微控制器) 来控制 Firgelli 自动线性致动器。
如果您正在寻找线性执行器,请致电我们或通过我们的技术热线给我们发送电子邮件。如果您正在寻找一个坚固的工作台执行器,请查看 轻型系列线性执行器 我们携带,或者 带电位计反馈的轻型装置。别忘了一个好的12VDC电源,它可以处理感应负载。MB1 线性执行机构支架 (FA-150系列的MB1)将为您节省大量时间和挫折感。



